



早在20世纪80年代末,在欧洲研究计划中进行了“欧洲最高效率和最高安全水平道路交通项目的开发工作(PROMETHEUS—PROgraMme for a European Traffic with Highest Efficien-cy and Unlimited Safety)[1]。但当时没有必要的部件(如环境检测传感器和小型高速计算机)和系统可利用。现在这些部件和系统都有了,并走向“灵敏的汽车”。这种灵敏的汽车可检测它周围的环境和从物体(目标)到本汽车的位置、相对速度并发出警报、对汽车进行干预,以免发生交通事故,而且它的功能越来越完善。超声波停车入位辅助系统越来越为用户欣赏、接受。ACC系统由于在加速行驶和改善夜视系统中发挥的作用,在批量使用后不久在市场上已占有较高的份额。其他的传感器和系统正处于快速发展过程。在已获得成功的基础上正在开发与安全性和舒适性有重大关系的一些新功能。
当将有关汽车周围环境的可靠信息包括在内时,还可进一步改进当前的主动安全性和被动安全性的效果。因为系统越早识别汽车可能发生的交通事故,系统越能有效地实现它的任务。向驾驶人及时报警,他就可提早做出反应。在由计算机干预汽车行驶动力学的主动驾驶人辅助系统中,当识别到危险状况时汽车做出的反应要比驾驶人的正常反应快。
1.交通事故的原因和避免交通事故的驾驶人辅助系统
1998年,在欧洲、美国和日本三个地区,在道路交通中死亡人数超过93000人,导致国民经济损失超过4000亿欧元。仅欧洲每年损失约达1600亿欧元。为此,欧盟委员会提出目标,在欧洲的道路交通死亡人数要大幅度下降。在2001年开始了e安全计划。该计划希望在15个欧洲国家中到2010年交通死亡人数要从约21000人减少到只有一半。
在过去,由于对汽车被动安全性的高标准要求,虽然交通事故的数量大致不变,但交通事故死亡人数不断下降。近来,在现代汽车上的安全气囊或安全带收紧器为提高被动安全性发挥重大作用。在这些系统减轻交通事故后果的同时,在危险状态,主动安全性系统(如ABS、ESP和液压制动辅助HBA)可帮助驾驶人避免交通事故。
但仅就上面所说的这些系统还不能达到欧盟减少交通死亡人数的目标,在开发未来的主动和被动驾驶人辅助系统时,关键是汽车避免交通事故的能力、对它周围环境的感知和了解、预先识别危险状况、在驾驶人的行驶方式方面尽可能给予辅助。
危险的行驶状况常常是几分之一秒时间决定的,它决定会发生交通事故或不会发生交通事故。Enke的早先研究[2]给出,如果驾驶人的反应早0.5s,驶上主路的交通事故的65%、约1/3的汽车前碰撞的交通事故和一半的十字路口的交通事故是完全不会发生的。
为确定在开发具有避免交通事故最大潜力的这样一些系统的重点时,建议看一下交通事故统计数字(图8.5-31)。
按德国公路局(BATt)统计,2004年所有交通事故中约30%的交通事故是汽车前碰撞和驶上主路发生的,25%是变换车道和离开车道引起的。其余的交通事故比较复杂,如十字路口、与行人碰撞。
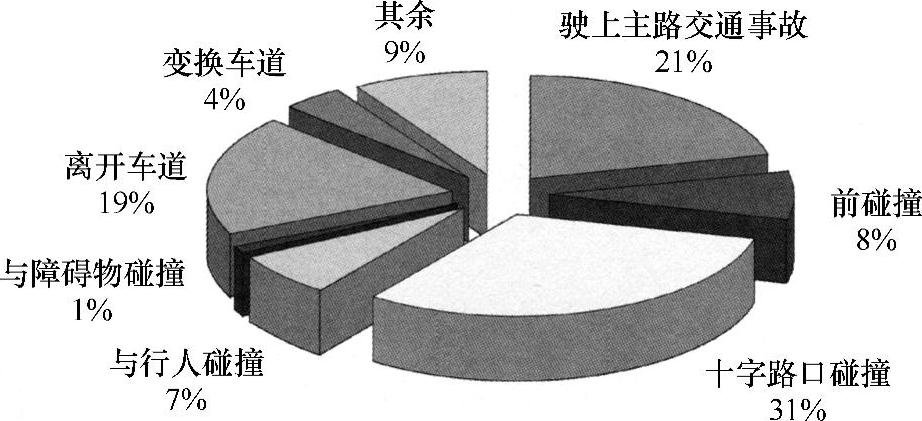
图8.5-31 在德国居民区内、外的交通事故
2.驾驶人辅助
什么是驾驶人辅助?驾驶人辅助系统应在所有的交通情况下给予驾驶人支持,使驾驶人轻松、没有压力、无交通事故下行驶。驾驶人辅助的概念具有多层意思,按应用情况可分:
1)驾驶人信息系统,如:导航、交通状况信息(交通信息频道TMC、数字音频广播DAB、全球移动通信系统GSM)。
2)汽车通信系统,如:汽车—汽车通信系统、汽车—基础设施通信系统。
3)稳定汽车行驶的驾驶人辅助系统,如ABS、ESP、ASR等。
4)驾驶人辅助预测系统,它依靠周围的视野传感器扫描汽车周围环境,如:停车入位、ACC系统。
5)识别驾驶人状况,以报警和干预汽车。
如在开头提到的PROMETHEUS项目已开发了驾驶人辅助系统的结构(图8.5-32)[1]。
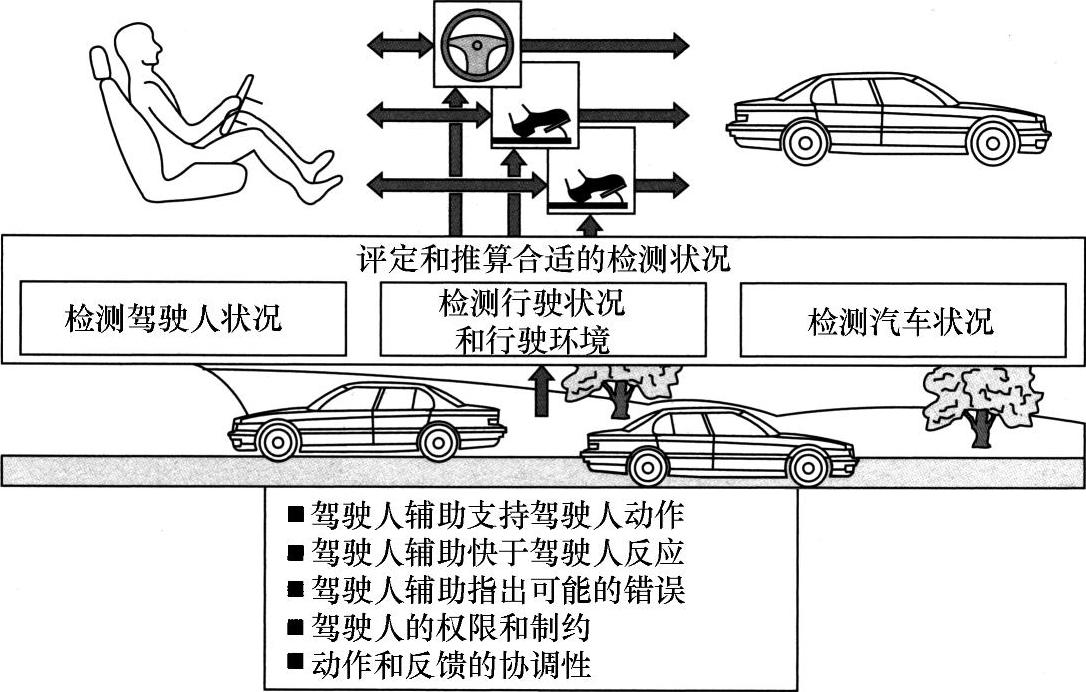
图8.5-32 驾驶人辅助系统的结构[1]
按驾驶人、汽车、行驶环境和行驶状况,驾驶人从驾驶人辅助系统的信息中得到光、声和触觉的感官渠道的报警。对驾驶人来说,驾驶人辅助系统根据合适的检测状况(检测驾驶人、汽车、行驶状况和行驶环境)干预汽车,在任何时候都应该是清楚的和能领会的,这样,驾驶人就不会惊恐和可能作出错误反应。驾驶人辅助系统操纵应尽可能直观,并且不会长时间转移目光。
驾驶人辅助系统在汽车上不断增多,配置人—机接口(HMI)就十分重要。
3.汽车通信系统
快速普及的家庭和办公室用的各种通信功能系统也扩大到汽车上。在汽车上的应用是汽车与汽车的通信(C2CC—Car to Car Communication)和汽车与基础设施的通信(C2IC)。在驾驶人辅助系统范围除聊天、交谈外,主要是用于安全性的通信。C2CC的应用是在发生交通事故和交通拥堵时转发紧急信息。C2IC的应用是设法与交通设施(红绿灯、路牌、路标、栅栏)的联系与通信,也可下载当前的交通信息[4]。
为此,要建立汽车之间、汽车和基础设施之间的高动态网络。建立这样的高动态网络首要的是要有一个通信标准。至今确定的是5GHz频段。目前由德国一些大汽车生产厂家合作制订了数据传输标准。重要的是网络的可用性和防止黑客入侵的安全性。
4.稳定汽车行驶的驾驶人辅助系统
2001年底德国统计局的调查表明,配备ESP系统的汽车侧滑的交通事故频度显著下降。对至今使用稳定汽车行驶的驾驶人辅助系统(ESP)统计证明这样一个论断,它具有防止交通事故的很大潜力。
ESP系统还可改善预测安全性系统(PRE-SAFE)。在交通事故危险的严重状况,通过与ESP和制动辅助系统(BAS)的信号传感器组合,预测安全性系统就可将主动安全性系统和被动安全性系统联系在一起。PRE-SAFE采取预先防止交通事故的安全性措施,使乘员为可能马上要发生的交通事故做好准备。这时与座椅靠背垂直的安全带收紧器激活,活动车顶(天窗)关闭(见6.5节)。
像ESP对汽车行驶动力学的干预一样,采取避免交通事故的措施或减轻交通事故后果的措施只有到那个时候才会实施,即表征汽车行驶状态的参数正好处于失控状态或交通事故正好发生时。当感知汽车已出现相互碰撞,安全气囊被触发,其触发的时间典型值为5ms。尽管采取减少交通事故的措施时间非常短,但安全气囊为减轻交通事故的严重程度和减轻交通事故后果方面还是发挥了重要作用。由于可用的时间非常短,当今安全气囊的使用潜力受到限制。预测安全性系统的驾驶人辅助系统具有避免交通事故的更大潜力,因为在危险状况它能提早做出反应。使用环境传感器的预测安全性系统扩大汽车的水平探测,这样可以将汽车周围的物体和状况考虑到要采取的避免和减轻交通事故的措施中。
5.预测安全性的驾驶人辅助系统
利用电子视野(电子眼)可实现众多的驾驶人辅助系统。当前,为这样的系统所需的电子部件可供使用,如高灵敏度传感器和高性能的微型计算机,有的正在按时间表开发。
(1)预测安全性的驾驶人辅助系统用的传感器 为在汽车环境中识别物体(目标),需要一系列传感器。约1993年以来,停车入位辅助系统用的传感器已投入使用。1999/2000年智能的速度控制器用的雷达传感器也已使用。作为夜视辅助的视像设备在2005年底用于高档乘用车,同时还有检测热平衡的微型热辐射测量传感器。其他的一些新的传感器正在开发中。使用这些传感器和设备可以检测物体(目标)并计算它们相对本汽车的位置和相对速度,从而得知汽车是否处于危险状况。环境传感器的检测范围表示在图8.5-33(见书后彩插)中。
(2)超声波近程传感器 当前的停车入位辅助就是使用超声波近程传感器,它的作用距离为2.5m或再稍远一点。它们装在汽车防撞杠(保险杠)上,当汽车接近障碍物时驾驶人可听到声音和/或看到显示。
图8.5-34是不同型式的第4代超声波传感器,控制器件和信号处理集成在传感器中[5,6]。
用于测量停车入位间隙和使驾驶人达到最佳的停车入位状态的停车入位辅助系统的结构相同但作用距离更远一点的传感器即将批量使用。在有电子伺服转向的汽车上更多地使用半自动停车入位辅助系统,在该系统中,在由计算机操纵转向时驾驶人负责汽车的纵向引导。

图8.5-34 第4代超声波传感器
(3)77GHz过程雷达 作用距离可达200m的多目标能力的远程传感器基于雷达原理。雷达的概念是“无线电识别和距离测定”。图8.5-35是第2代远程雷达传感器(2004年开始使用)。它比第1代的雷达传感器有较大的波束角,体积小,重量轻。Bosch雷达传感器的高频部分和电控单元集成在外体中。
波束角为±8°的窄雷达波扫描汽车前面的空间,并得到本车与前面汽车的距离和相对速度。电控单元(图中的上部薄板)集成在传感器体中。雷达传感器由分析、处理4个雷达波束得到角度信息。雷达波束由4个发射源(polyrods)(见图中的下部薄板)发射。位于传感器前端、可加热防止结冰的透镜将雷达波束聚集在波束角上。
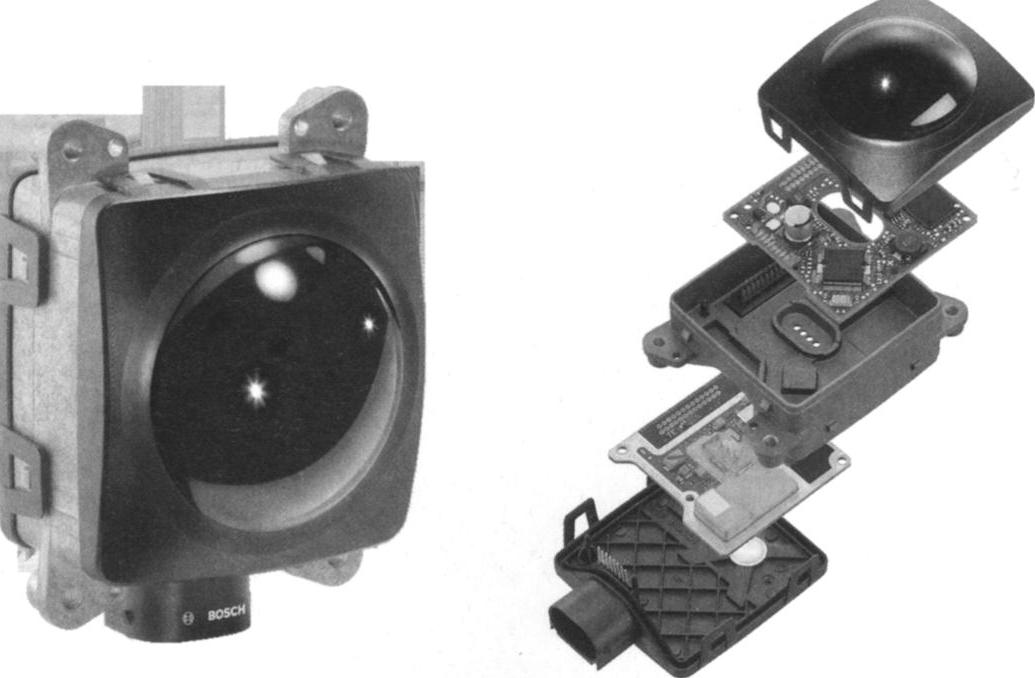
图8.5-35 集成电控单元的第2代77GHz雷达
(4)远程激光雷达 几年来,ACC用的激光雷达传感器已在日本汽车上使用,尽管它比雷达的有效功率要低。激光雷达(激光识别和距离测定)利用800~1000nm红外波长范围的电磁波。雾和恶劣的视野状况,特别是泡沫或浪花有时会很大地衰减激光雷达波束,因而使测定距离缩短。
(5)近程传感器 除扩大测量距离约达4.5m的超声波传感器外,近程传感器还可使用24GHz短程雷达传感器或激光雷达传感器。它们可以形成汽车周围的“虚拟安全带”,作用范围达20m。
自2005年初以来,对24GHz的超宽频段(UWB)已在EC-Richtlinie(EC指令)中作了规定:2013年前有限使用UWB。在2005年到2013年期间为保护已开设的服务(无线电天文学、识别地球卫星服务),在欧洲地区不允许超过7%的渗透率。替代的79GHz UWB已在2004年在欧洲开放。
(6)视像传感器 图8.5-36是适用于汽车的视像摄像机。摄像机头部包括图像拍摄芯片(成像器件)、透镜和控制摄像机的电子装置。拍摄的图像在单独的高性能计算机中处理。
因为在汽车使用环境中图像画面的亮度无法控制,常规的图像传感器(CCD)的动态亮度变化范围不够。为此需要高动态性能的成像器件。当前非线性亮度变换的CMOS技术可覆盖很大的动态亮度变化范围(最大可达150dB),这样需要进一步考虑目前用于汽车上的、常规的CCD传感器的替代问题。
6.舒适性和安全性的驾驶人辅助系统
以前面介绍的一些传感器为基础,可以实现很多的驾驶人辅助系统。
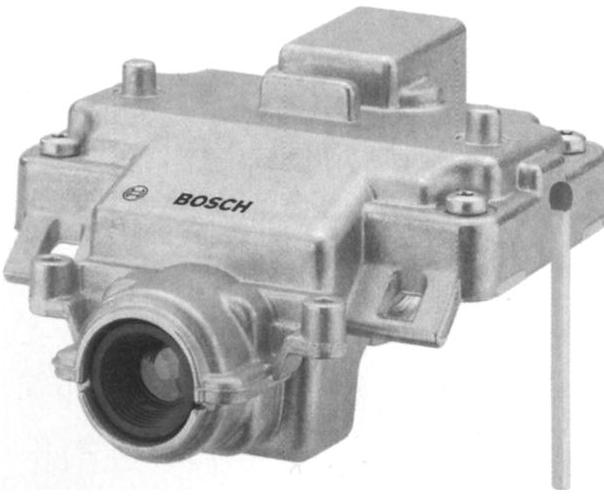
图8.5-36 用于汽车的CMOS摄像机
(1)自适应巡航速度控制(ACC)用目前的表达方式,ACC系统就是测量前面汽车到本车的距离,并将它控制到安全距离范围。图8.5-37是ACC系统工作原理。
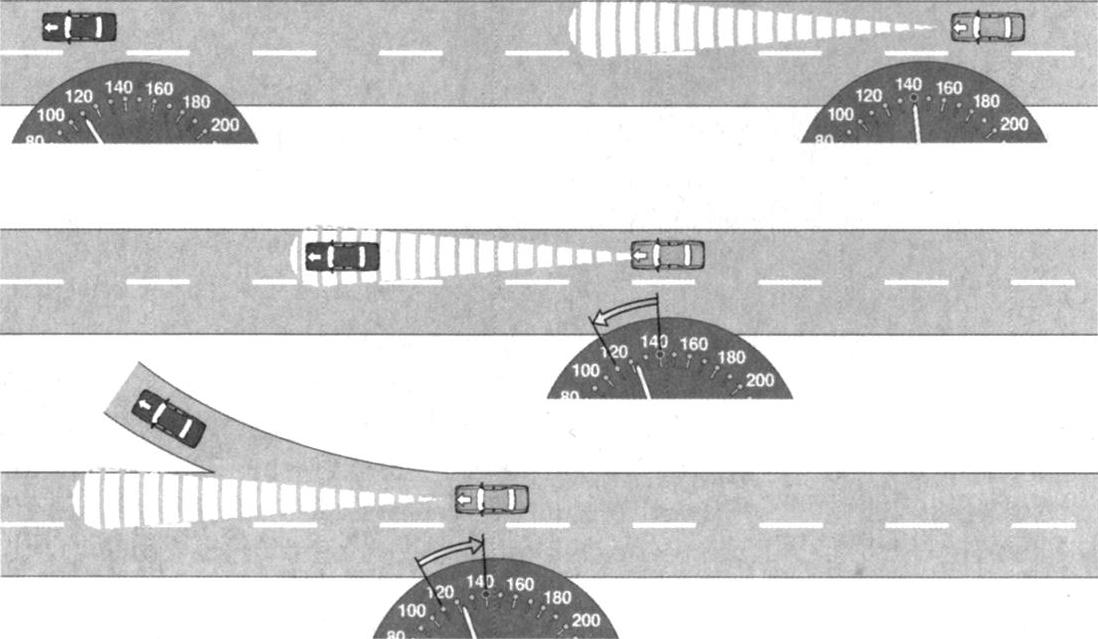
图8.5-37 ACC系统工作原理
在自由的车道,汽车以预选的速度行驶(速度控制器模块,图8.5-37,上)。
在检测到前面有汽车时,ACC系统自动使本车的行驶速度与前面汽车的行驶速度适应并按预选的安全距离跟随行驶(图8.5-37,中)
通过加速踏板和制动器的干预,使汽车保持在设定速度和安全距离行驶。在偏离这些值时,ACC系统向驾驶人报警。
如果较慢行驶的前面汽车离开它原来的车道(图8.5-37,下),则本车再加速到先前设定的车速行驶。
为防止高速弯道行驶,要附加使用ESP系统中的传感器信号,这样ACC系统可以自动降低弯道行驶速度。任何时候驾驶人操纵加速踏板就可切断ACC系统或短时间点一下制动踏板就可切断ACC系统[9]。
当前的ACC系统可在速度为30~200km/h范围工作。功能扩大的ACC+(ACC plus)已在2006年成批使用。它具有制动汽车到静止状态的功能。为在空车道上再次接入ACC系统,只要点一下制动踏板就可以了。进一步的开发步骤是扩大ACC系统的功能范围至全速范围(ACCFSR—ACC Full Speed Rang)。在制动汽车到静止状态后,在设定的时间间隔内汽车又自行起步行驶。这样,在车队行驶时可减轻讨厌的走走停停的驾驶工作。
(2)预测安全性系统(PSS)目前的ACC系统是作为舒适性功能设计的,它可减轻驾驶人的工作强度。2005年以来,ACC系统成为安全性系统中“预测安全性系统”的组成部分。
因为在所有驶上主路的交通事故中的68%的事故主因是疏忽大意,所以PSS具有避免交通事故的很大潜力。其他的11%是既不留神又紧跟行驶造成的。在所有驶上主路的交通事故的9%仅仅是追尾[11]。通过PSS系统纵向引导汽车可以遏制占很大份额的驶上主路的交通事故。
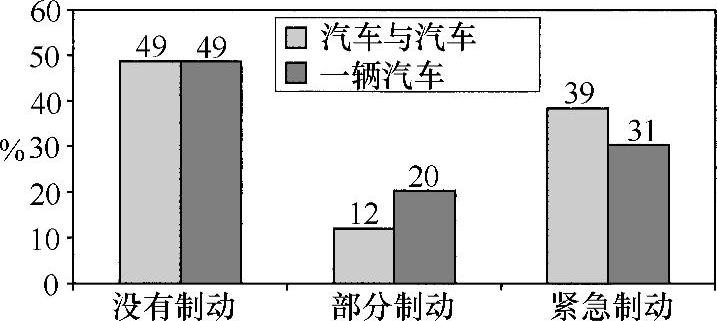
图8.5-38 发生交通事故时的制动状况
图8.5-38是发生交通事故的制动状况分析[12]。真正的紧急制动只占所有汽车与汽车碰撞的交通事故的39%。在没有第2辆汽车参与的交通事故为31%。所有碰撞的交通事故中几乎一半根本就没有明显的制动(汽车制动减速度<2m/s2)。在剩余的交通事故中没有很好制动(过于胆怯)。该分析证明预测安全性系统在避免交通事故中和减轻交通事故后果中发挥的重要作用。利用PSS系统辅助驾驶人制动和加速汽车或通过计算机对汽车行驶干预就可避免交通事故和减轻交通事故后果。
为进一步开发PSS系统,采取以下行动计划:
1)第1阶段:优化全制动辅助(2005年已成批使用)。在这阶段,PSS系统为可能的紧急制动提供了制动装置。在危急的交通事故状况下,它可建立制动压力并将制动摩擦衬片不明显地靠在制动盘上,并与液压制动辅助(HBA)匹配。驾驶人赢得宝贵的几分之一秒时间,直至进入全制动。如果驾驶人紧急制动,在优化汽车减速度值时就可以尽快作出制动反应,实现最短的制动距离。如果发生交通事故,PSS系统就可减轻交通事故后果,拯救生命。
在所有碰撞事故的约一半碰撞中,汽车撞在障碍物上时驾驶人从座椅上弹跳起来。对这种交通事故需要开发下一代的PSS系统。
2)第2阶段:在驶上主路面临交通事故时报警 第2代PSS系统不仅提供制动装置,而且在可能发生危险的交通情况前及时向驾驶人报警,从而可在很多情况下避免交通事故。第2代PSS系统可产生短时的、强烈的制动冲击。对驾驶人的研究表明,这种对驾驶人脚部肌肉的冲击(报警)使他能在最短的反应时间提高对汽车行驶状况的注意。通过短时收紧安全带,第2代PSS系统还可向驾驶人报警。由于第2代PSS系统的这些特征,可以进一步改进在第1阶段起作用的,也就是在图8.5-38中反映的疏忽大意、不留神引起的交通事故状况,即驾驶人根本没有制动或制动时汽车减速度很小。第2代PSS系统已在2006年底成批使用。
3)第3阶段:碰撞无法避免时紧急制动。PSS系统第3阶段是扩充阶段,它不仅识别与前面汽车的无法避免的碰撞,而且当驾驶人没有或没有足够快地对前面汽车的报警作出反应时以最大的汽车减速度紧急制动,从而减少事故中的重伤人员。第3阶段的PSS系统在成批使用中可以看出它有不断提高制动压力的趋势。自动控制汽车功能在识别物体时要求提高可靠性和估计交通危险,如可通过与视像传感器的组合辅助雷达传感器[10]。另外,在公共道路交通中应用这套PSS系统需要法律上的依据。(https://www.xing528.com)
(3)视像系统 已经讨论的视像技术首先用于信息的(成像的)驾驶人辅助系统。图8.5-39是视像传感器原理与功能实例。图中列出图像处理可以提取什么样的信息(在图中的圆圈中)举例。
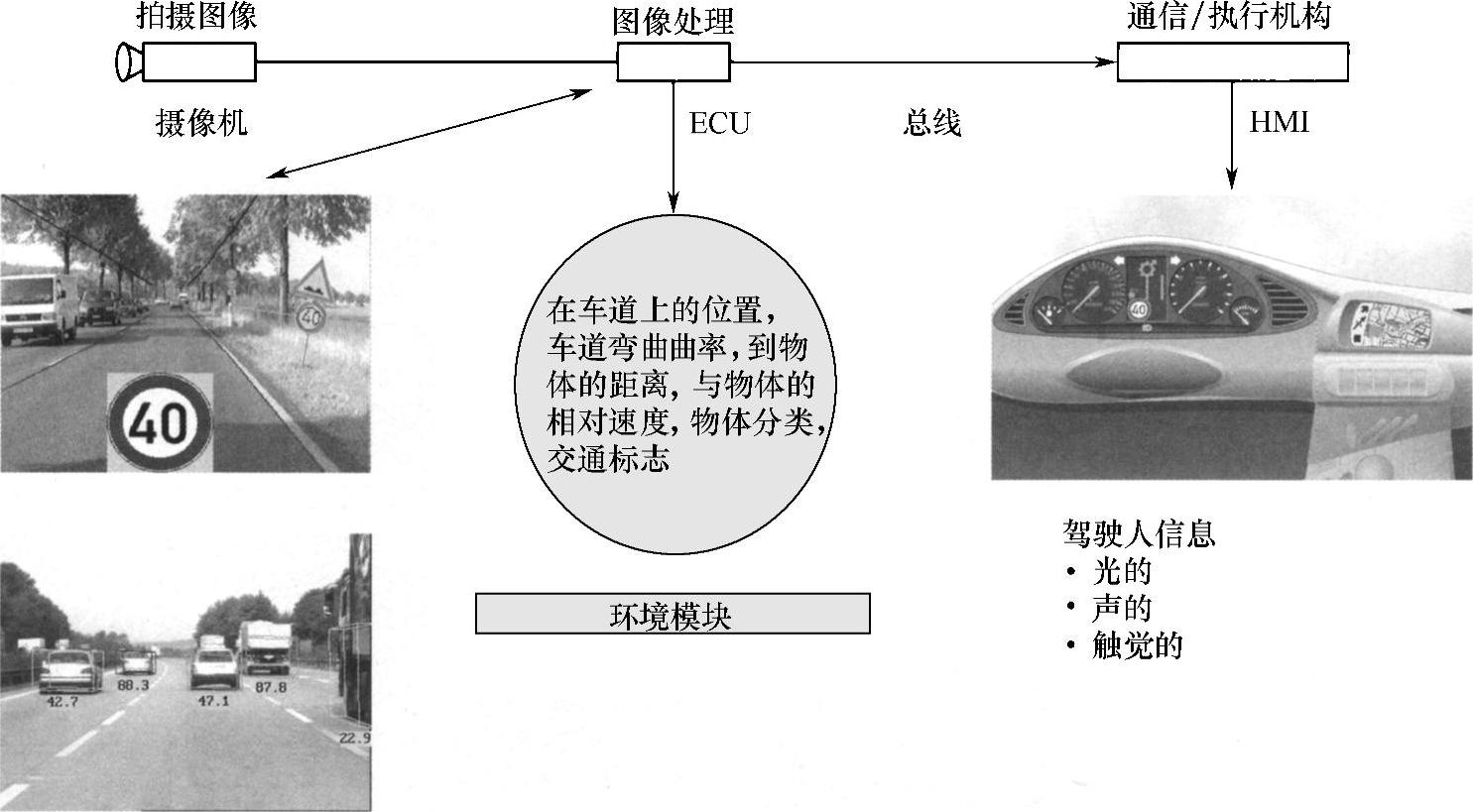
图8.5-39 视像传感器功能原理实例
目前视像传感器的分辨率、灵敏度、动态亮度离人的视觉器官(人眼)的能力还差得远。但新开发的高动态图像传感器与现代图像处理技术的组合表明这种传感装置具有巨大的潜力。视像平台按多功能设计,即用一台摄像机可实现报警和对汽车干预的多种功能[10]。
提取的图像特征可以以文件清单形式通过数据总线提供给车上其他部件(系统)。在实例中(图8.5-39),仪表组合接收到图像处理计算识别到的和作为图形标志的速度限制,并显示在仪表组合的显示屏上。如果驾驶人没有注意到速度限制值,则视像系统通过附加的声音或触觉信息(如踩加速踏板时感觉沉重)向驾驶人报警或传递信息。
在这些部件和信息基础上的PSS系统具有报警和干预汽车行驶的功能。前摄像机具有如识别车道、离开车道报警或识别交通标志等功能。此外,如前所述,PSS系统还可以辅助ACC系统的传感器,除了测量距离外还可识别物体并区分物体(对物体分类)。特别有意义的是PSS系统还可改善夜视系统,避免交通事故。
(4)夜视系统 改善夜视为减少交通事故做出重要贡献,因为所有出现死亡的交通事故中约占50%是发生在夜间的,尽管夜间的交通流量只占全天交通流量的1/5[14]。除了恶劣的天气状况外,主要是夜间的视野不好。现已有光分布图样适用于一定交通状况的前照灯系列,但它们的炫目问题,特别是对年长的驾驶人,并没有完全消除(见8.5.2小节)。
目前有两种改善夜视的方法,即以远程红外线(FIR)为基础的系统和近程红外线(NIR)为基础的系统。
图8.5-40是这两种方法的区别。
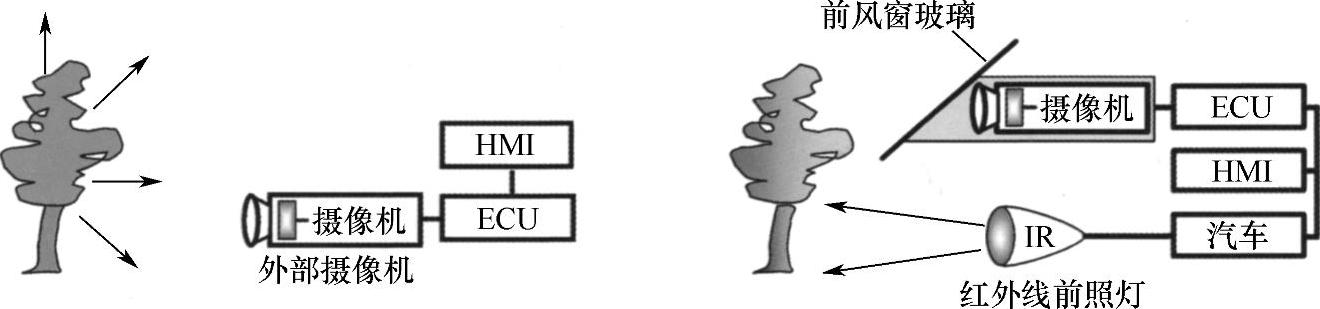
图8.5-40 远程红外线系统(左)和近程红外线系统(右)
1)远程红外线(FIR)系统。改善FIR夜视系统推荐使用热辐射,其“远程”红外线波长为7~12μm,它由物体发射,即是被动系统,它没有照亮物体所需的另外辐射源。
拍摄热成像的热电的热成像摄像机或微辐射摄像机只在上述给定的波长范围灵敏。因为风窗玻璃不能透过这种波长,所以摄像机必须安装在汽车外部范围。目前可使用的传感器分辨率为320×240像素。传感器信号通过电控单元(ECU)输入到人—机接口(HMI)显示屏上。
热体在黑暗环境(冷环境)底图上显现出明亮的轮廓,但这种图形显示对驾驶人来说是陌生的,因为形象图(效果图)不是正常的物体反射图。另一个缺点是在外界低温环境下,物体与背景的反差分外明显。在热的环境下只有很小的反差。
2)近程红外线(NIR)系统。近程红外线系统使用接近可见波段800~1000nm的红外线辐射。因为物体在这个波段没有辐射,所以必须用专门的前照灯照射物体。这样,可以用对红外线灵敏的视像摄像机拍摄物体。硅图像传感器对这个波段灵敏,所以,像在夜视系统中使用的那样,白天使用同样有效。
汽车卤素灯具有高的红外线成分,它从可见光波段(380~780nm)到2000nm。最大值是900~1000nm。视像摄像机所用波长的上限为1100nm,这是硅传感器的灵敏度边界。实际上还要将照明模块集成到NIR系统中。照明模块由卤素前照灯和串联的光学滤波器组成。光学滤波器滤掉发射波段中的可见光部分。
由于NIR波段接近可见光波段,物体自然反射的NIR与可见光相似,即在远光灯时看到的图像与正常看到的图样是一样,并为驾驶人信任。
为得到较大反差的、光彩的图像,并能很好识别物体,在高品质的图像系统中还要对视频图像后处理。这样可在150m距离内可靠识别行人。
目前所用的视像传感器分辨率为640×480像素或还可更高。进一步的发展是瞄准报警系统。在该报警系统中,驾驶人需要时可对在车道上或旁边车道的物体报警。
图8.5-41是NIR系统(图a)和FIR系统(图b)的画面。
在图8.5-41a中可清晰地看到,只能识别由IR前照灯投射的物体。观察者看到的图像与黑白远程图像一样可信。在图中还可清楚地看到车道标志。
在图8.5-41b的FIR系统见到的画面首先是引人注目的远距离物体。该系统显示温度高于周围环境的所有物体。车道标记则相反,见到的只是一个大概轮廓。
比较这两个系统的特性,可以看出NIR系统具有明显的优点,可列举如下[15~20]:
①摄像机可反复使用,并有白天使用的功能。
②能清晰识别物体,可区分与环境温度一样的物体。
③耐气候性。
④成本低(主要是可反复使用)。
⑤可安装在风窗玻璃后面。
⑥漂亮的效果图,具有很好识别物体的能力。
FIR系统的优点是:
①可识别有生命的物体。
②没有会车时的眩目。
③距离远。
在支持FIR技术的辩论中,最后的距离远的优点作为FIR技术的突出论点而列举出来。当然,距离远在实际上常常并不需要。因为距离超过100m,这个距离对NIR系统也可不费劲地达到。在州公路的行驶速度有足够的时间采取避免交通事故的各种措施。
3)夜视信息显示。摄像机拍摄的图像可放在汽车上的不同地方,可放在风窗玻璃上作为平视显示器(HUD)、放在副仪表板上或放在仪表组合中。科学试验[21]表明,为显示摄像机拍摄的图像,将图像屏幕放在仪表组合中是驾驶人最欢迎的。在新的S级轿车上可选择安装地点。图8.5-42是仪表组合中的两种工作模式。
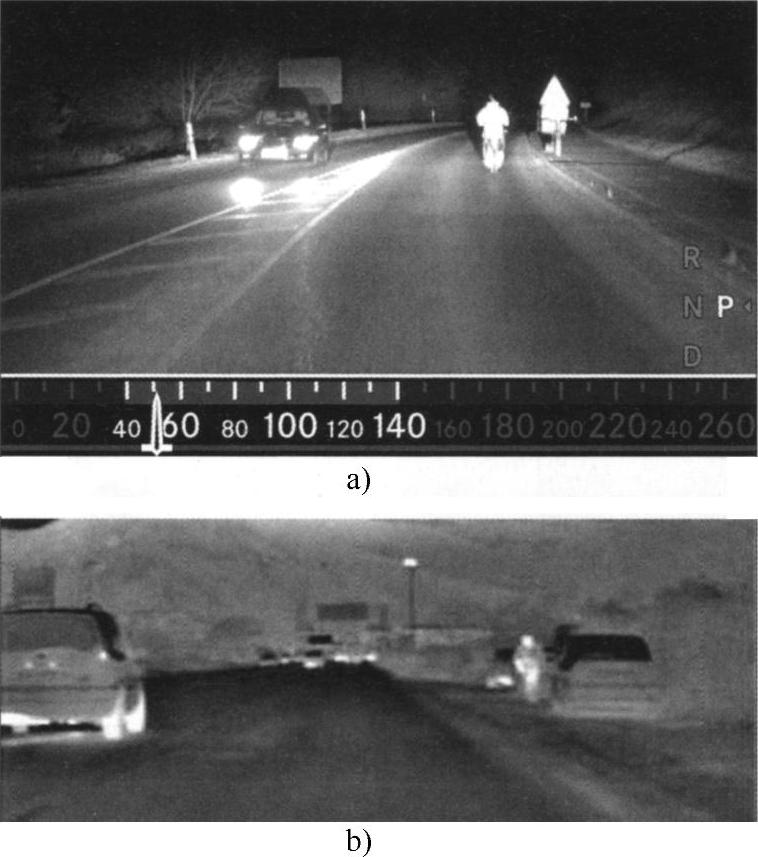
图8.5-41 NIR系统(图a)和FIR系统(图b)状态图
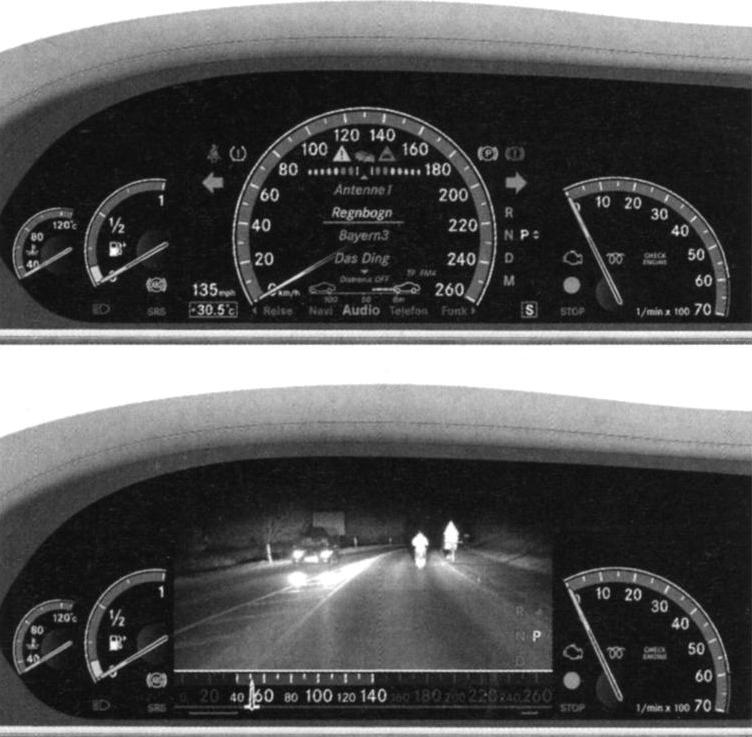
图8.5-42 仪表组合中的工作模式
上:转速表显示模式 下:夜视模式
在夜视模式中汽车行驶速度采用水平线条形式显示,以能在夜视中看到物体。
在进一步开发的夜视系统中,在本车道或旁边车道的物体前,根据汽车行驶状况报警并显示物体图像,或甚至完全用图像显示替代。这些措施可加快识别物体和限制较长时间转移视线。理想情况是,如在风窗玻璃中,在汽车继续行驶时驾驶人即将可以看到的物体显现出来其警告符号。
最简单的方式可以考虑将摄像机放在汽车后部范围作为停车入位和倒车行驶辅助。如果通过图像处理可以识别到在本车后部范围的物体和在危险的状况(如在超车道的汽车快速接近本车)向驾驶人发出报警,则摄像机的利用率大为提高。
(5)离开车道报警/变换车道辅助 无意的变换车道是最经常发生交通事故的原因。无意变换车道大都是疲劳(打盹)或注意力不集中引起的。变换车道辅助应消除产生交通事故的原因。当存在交通危险时,汽车驶过车道标志线而没有开启转向灯,变换车道辅助识别车道标志线并向驾驶人报警。
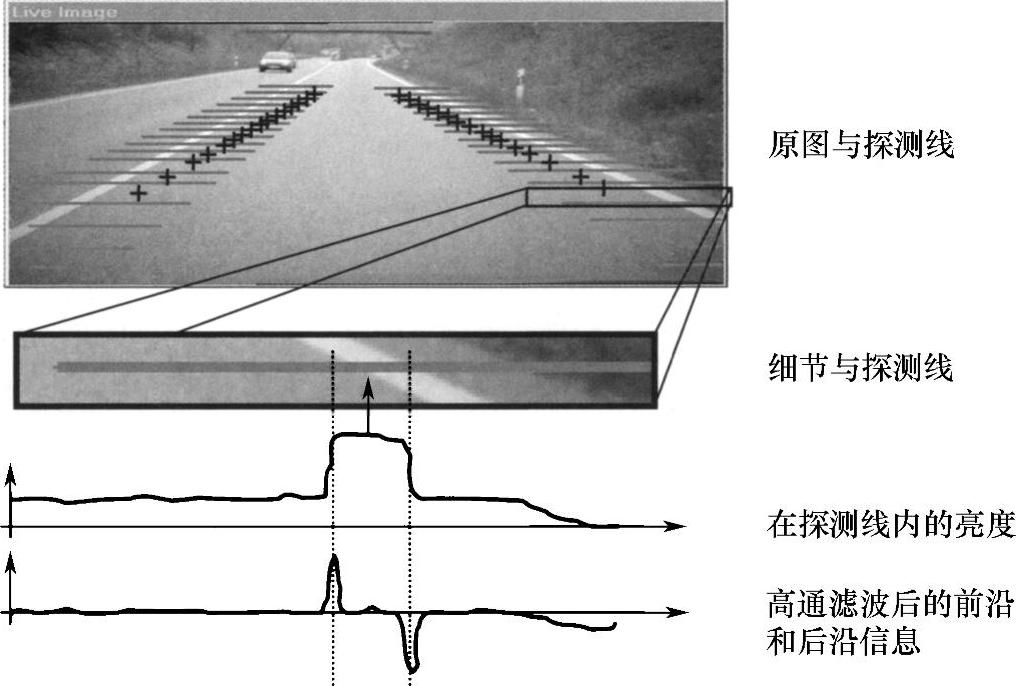
图8.5-43 车道识别原理说明
离开车道报警(LDW-Lane Depature Warning)可采用单声或立体声系统。在VGA的图像分辨率、良好的天气状况和良好的车道标志线情况下,单声系统的报警距离略超过40m。立体声系统报警距离则还可超过10%~20%。由于成本原因,至今在市场上只有单声系统。图8.5-43是车道识别原理说明。
如图所示,只要利用沥青路面和车道标志线的光线反差,图像处理系统就可探测汽车前面的车道标志线。至于车道标志线间的缺口可用卡尔曼(Kalman)滤波消除。图8.5-43中的上图是摄像机拍摄的、带探测线(见从上算起的第2个图的细节)和在上图可见的标志车道走向的十字线的图像。车道走向是由图像处理计算机算出的。为识别车道标志线,要分析在探测线内的发光信号。利用高通滤波器可得到车道标志线的边界。
如果汽车驶过车道,就会向驾驶人发出报警信号。有不同的、效果很好的报警方式:从汽车扬声器中发出报警的声音(有方向性的立体声)或“片状带发出的清脆声。最新使用的是触觉感官的报警方式。带方向信息的座椅抖动装置已在2004年投入市场。转向盘振动(优点是直接辅助转向)或用轻微的回转力矩冲击转向的报警方式目前正在进行有效性试验。
7.前景
图8.5-44是在”安全性汽车“的路程中各种驾驶人辅助系统的应用场合。这些应用场合可分两类:
1)以“半自动汽车”为长远目标的舒适性系统。
2)以避免交通事故为目标的安全性系统。
汽车在危险的环境前驾驶人辅助系统向驾驶人报警或建议行驶技巧(方法)。这方面的实例是停车入位辅助或改善夜视系统。离开车道报警或在行驶死角中识别物体也对避免交通事故做出贡献。
汽车引导系统出现了从ACC系统到完全纵向引导的各种系统功能,在城市范围和在高速行驶时也能实现汽车引导。在这方面进行了雷达数据和视像数据的复杂的、综合的数据融合。如果在纵向引导系统基础上再补充同样是以视像为基础上的横向引导系统(车道保持辅助),则可想象为自主导向。
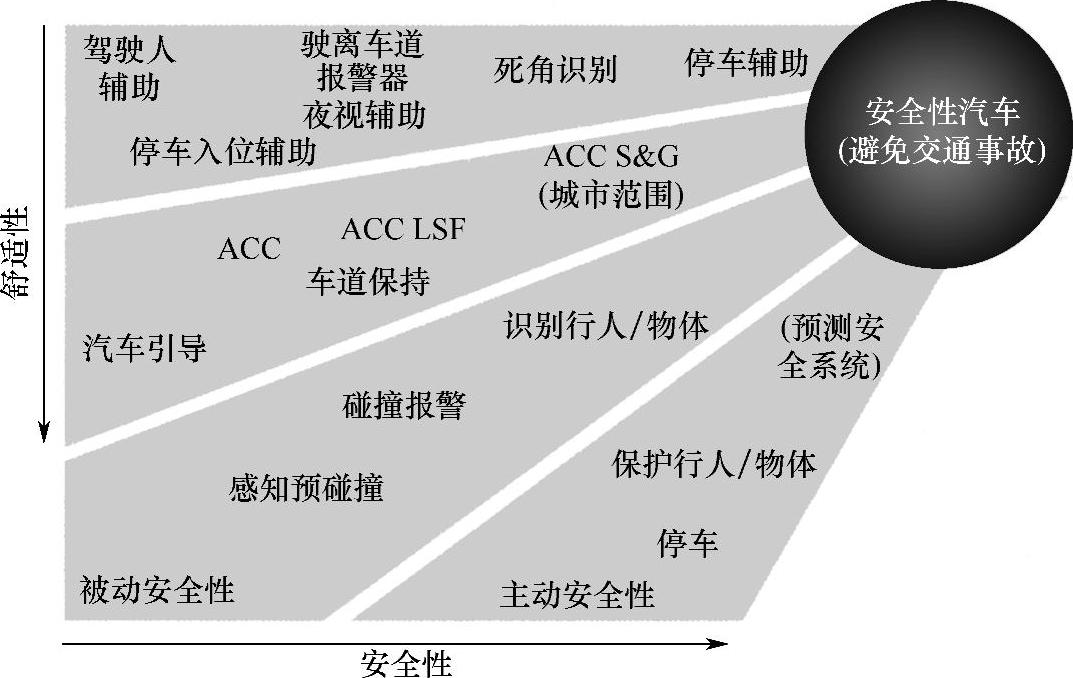
图8.5-44 驾驶人辅助系统避免汽车交通事故
被动安全性系统包含预先识别可能的碰撞情况(预先防止碰撞)和保护行人的功能。
对主动安全性的性能和可靠性提出了最高的要求。这些要求涵盖从简单的在停车入位时汽车在障碍物前自动制动、停车到预测安全性系统。前景是在目前的基础上达到避免交通事故到计算机辅助实施行驶技巧,以避免碰撞。
但前面所说的这些系统的性能目前还受到明显的限制。这些限制是由于传感器技术的欠缺和缺少智能计算机引起的。第1步是数据融合,如雷达测定数据和视像数据。雷达能很好地快速测量距离和速度,但表示障碍物的大小和类型则受到很大限制。理想的方式需补充视像传感器。视像传感器能估计障碍物大小。如果它与雷达信号组合就可很好地识别物体类型和关联的特征。进一步开发(特别是在视像技术方面)能识别物体类型,带预测其他交通参与者运动的场景画面促使我们进入复杂的、综合性的避免事故的研究领域。
复杂的驾驶人辅助不应引诱驾驶人将控制汽车的任务托付给计算机。目前的系统已复杂到这样的程度,即对汽车的控制和责任在任何时候都在驾驶人方面。驾驶人的意愿总是优先的。违背驾驶人意志干预汽车按日内瓦国际协议是不允许的,为此需要一个新版本的国际协议。
很多技术进步,按本书编者预测,都离不开无交通事故道路交通的这一美好憧憬。还有众多的技术措施正逐步引入舒适性系统和安全性系统中。这些措施在使驾驶人放松、减轻交通事故后果、避免交通事故方面发挥了很大作用。
欧盟(EU)适时首倡e安全性计划(e—Safe-ty—Programm)。汽车生产厂家和供货商正抓住这个机会,力图为实现这个目标做出贡献。
图8.5-45是夜间的混沌的城市交通。
图8.5-45 夜间的混沌的城市交通
参考文献
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。