



使用ANSYS Workbench进行车辆结构有限元分析时,Mechanical中提供了三种类型的常用载荷供读者选择使用。一是惯性载荷,惯性载荷对整个系统均有作用,而且当涉及质量的时候,必须输入材料的密度;二是结构载荷,这是指作用在结构上的力或者力矩;三是结构支撑(约束),利用约束来限制结构部件在一定范围内的移动。下面对常用载荷分别进行介绍。
1.力和压力
力载荷 :力可以施加在结构表面的点、边、面上。当一个力施加到两个同样的表面上时,每个表面将承受这个力的一半。同样,当一个力施加到一条边上,而且这一边上只有两个节点,每个节点将承受这个力的一半。力的方向和大小可以通过定义矢量、分量来施加。
:力可以施加在结构表面的点、边、面上。当一个力施加到两个同样的表面上时,每个表面将承受这个力的一半。同样,当一个力施加到一条边上,而且这一边上只有两个节点,每个节点将承受这个力的一半。力的方向和大小可以通过定义矢量、分量来施加。
在2.3.3的案例中,给出了将力施加到边上的案例,力的方向和大小通过分量来定义。如图4-149所示。
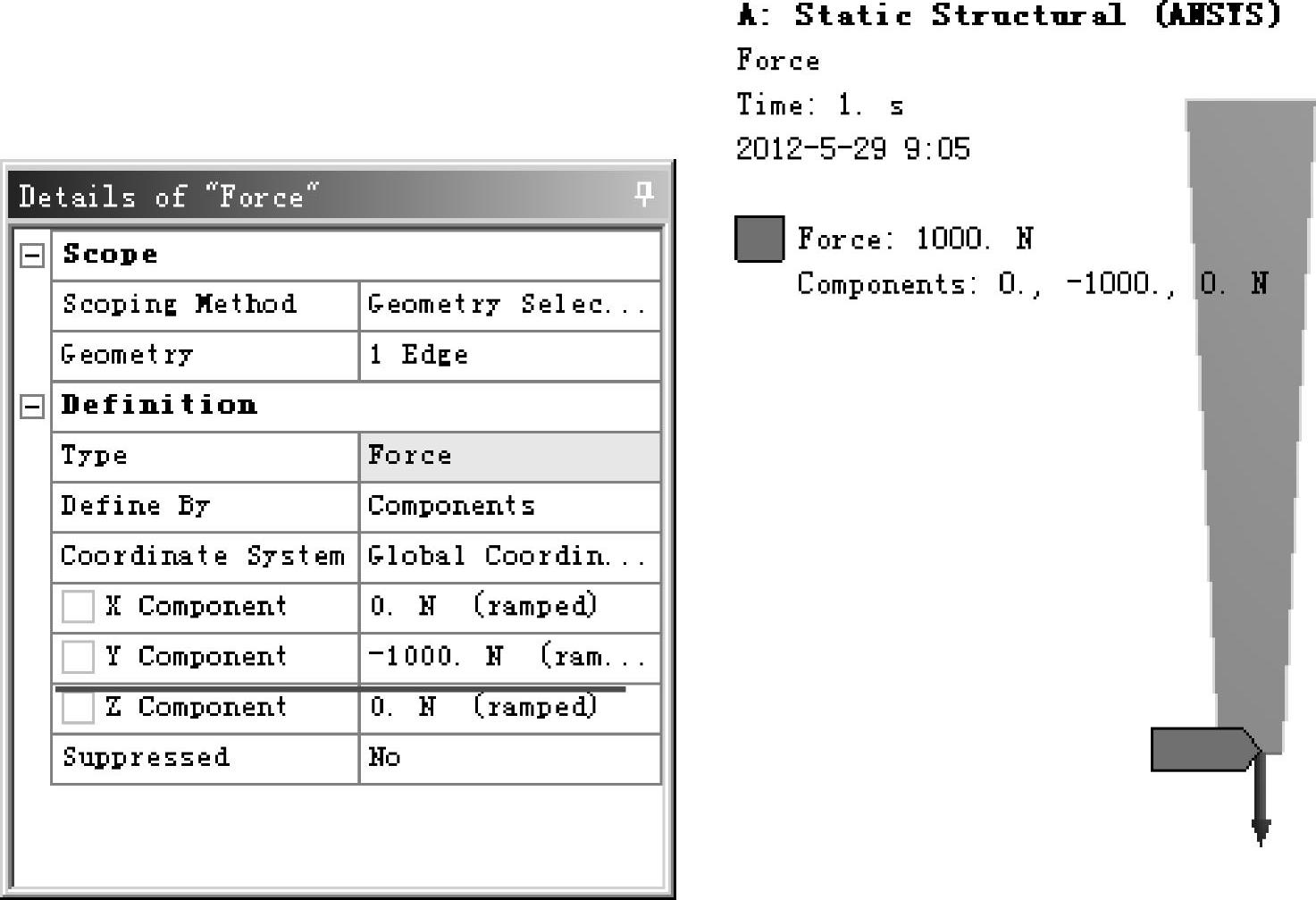
图4-149 力作用在边上
接下演示如何将力施加到点上,打开随书光盘上的Load_forces.wbpj,用鼠标左键双击A4—Model,启动ANSYS Workbench Mechanical,在项目树左侧用鼠标左键单击Force,然后单击鼠标右键,在弹出菜单选择Delete,在弹出对话框单击“是(Y)”按钮,如图4-150所示。
在如图4-151所示的两个顶点上施加大小为1000N的力。用鼠标左键单击项目树中的Static Structural(A5),然后单击鼠标右键,在弹出菜单中选择Force,选择杆的最下端的两个端点,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,并按照如图4-151所示在细节窗口定义力的大小和方向。
然后单击工具栏上的 按钮。在项目树中单击Normal Stress,查看应力分析结果,如图4-152所示,与图2-63的计算结果比较可以看出,二者的计算结果相同。
按钮。在项目树中单击Normal Stress,查看应力分析结果,如图4-152所示,与图2-63的计算结果比较可以看出,二者的计算结果相同。
压力载荷致,其正值代
 :压力载荷只能施加在表面,并且方向通常与表面的法向方向一致,其正值代表进入表面(例如压缩),负值代表从表面出来。
:压力载荷只能施加在表面,并且方向通常与表面的法向方向一致,其正值代表进入表面(例如压缩),负值代表从表面出来。
打开随书光盘文件Load pressure.wbpj,用鼠标左键单击项目树中的Static Structural(A5),然后单击鼠标右键,在弹出菜单中选择Pressure,用鼠标左键单击工具栏上的选择过滤器 ,用鼠标左键单击选择连杆大头的曲面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,并按照如图4-153所示在细节窗口定义力的大小和方向。
,用鼠标左键单击选择连杆大头的曲面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,并按照如图4-153所示在细节窗口定义力的大小和方向。
更改细节窗口中的默认设置,定义压力为-1000,压力的方向为Normal to,如图4-154所示。
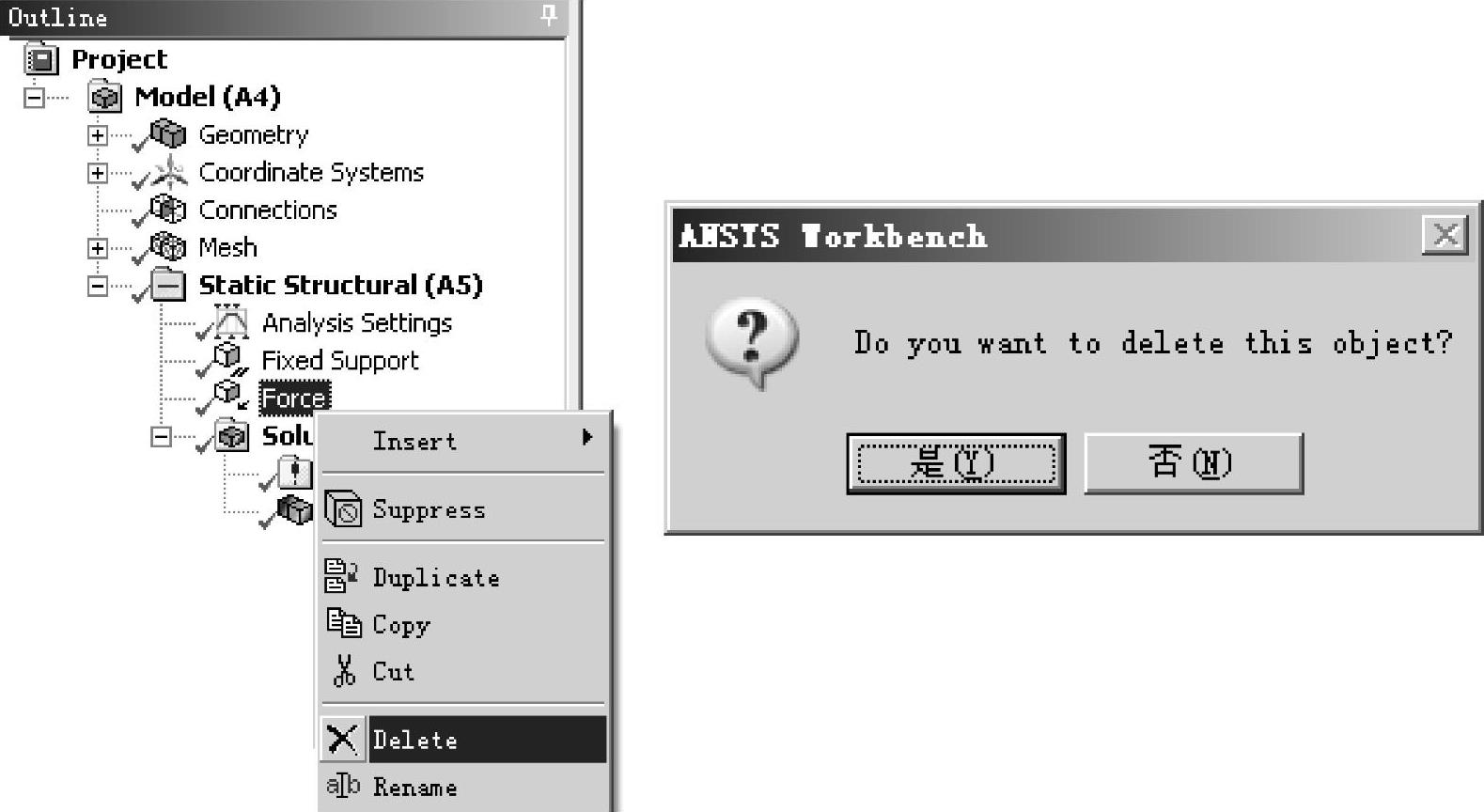
图4-150 删除已有的载荷
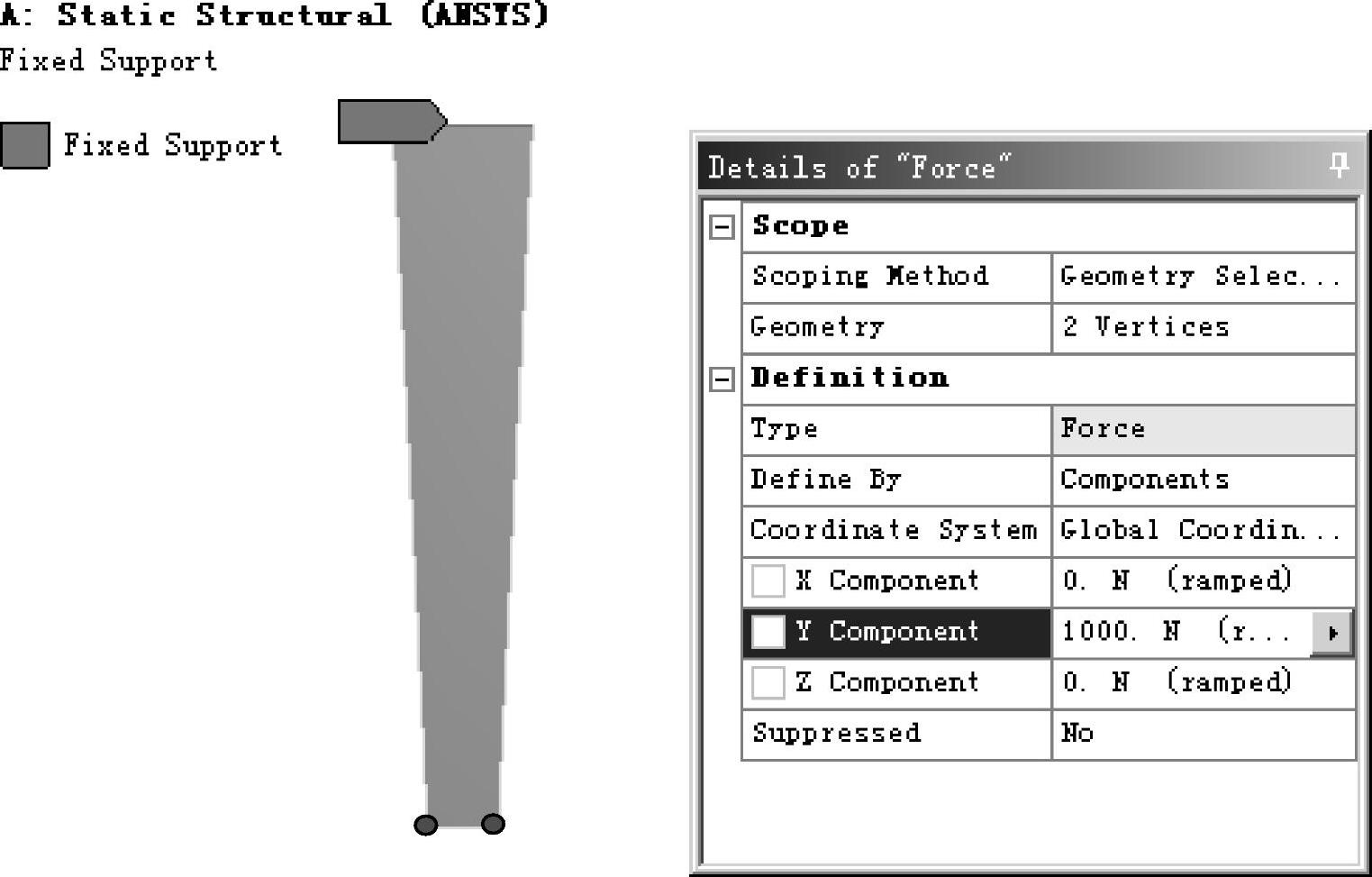
图4-151 定义力的加载位置、方向、大小
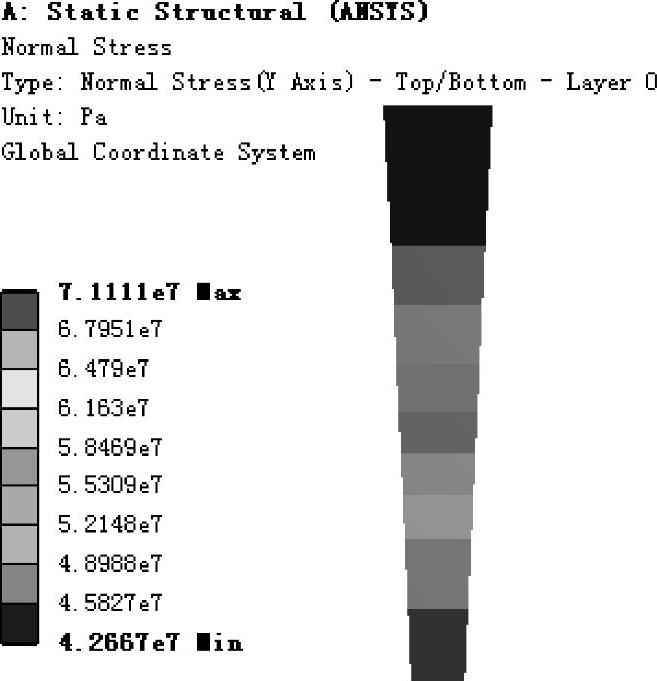
图4-152 应力计算结果
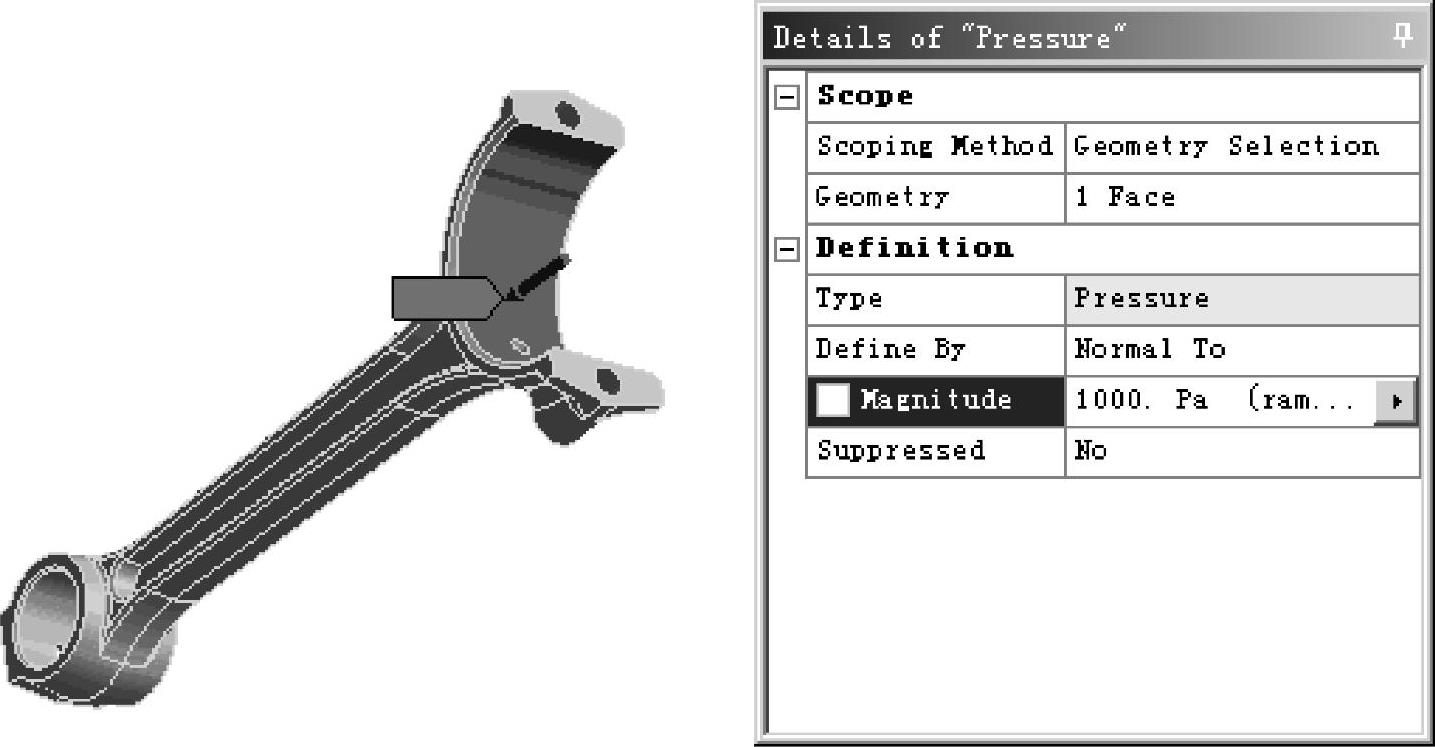
图4-153 定义正压力的大小和方向
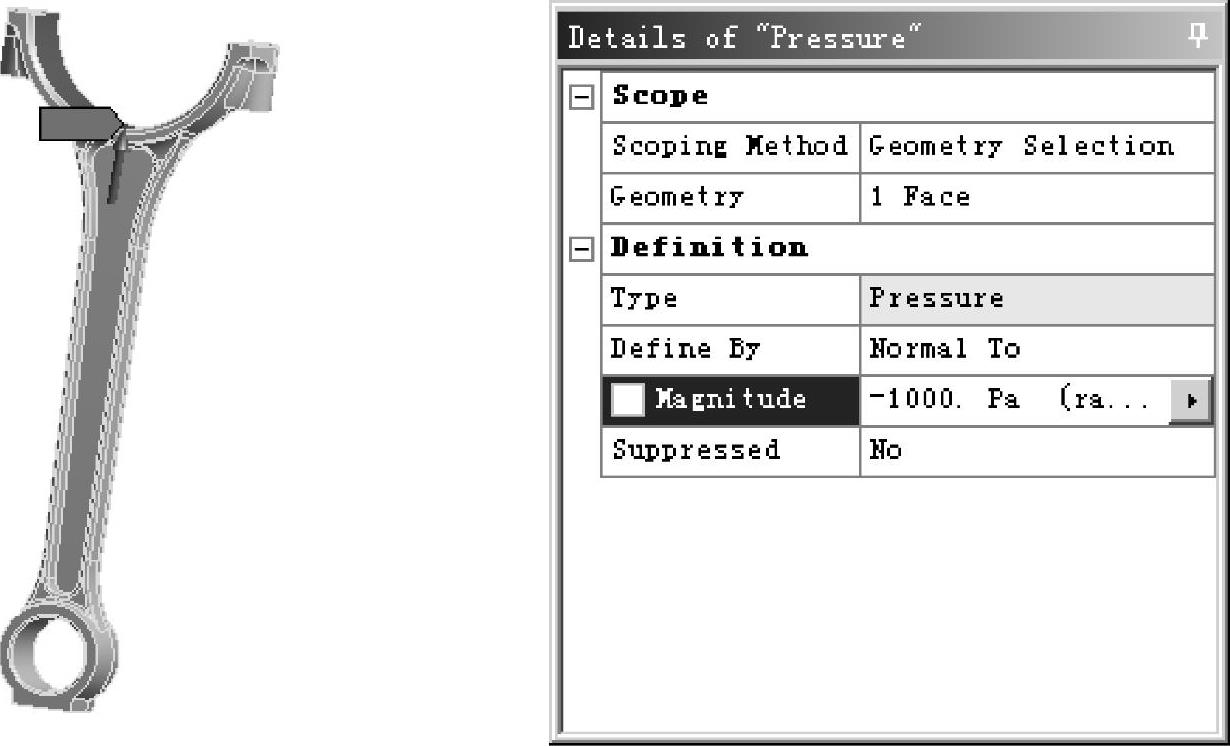
图4-154 定义负压力的大小和方向
2.惯性载荷
惯性载荷包括加速度与重力加速度。可以通过鼠标选中 来定义加速度。另外,Mechanical还提供了标准的地球重力加速度,加载时只要用鼠标选中
来定义加速度。另外,Mechanical还提供了标准的地球重力加速度,加载时只要用鼠标选中
 定义即可。许多读者通常对加速度方向符号感到迷惑。在程序内部加速度是通过惯性力施加到结构上的,而惯性力的方向与所施加的加速度的方向正好相反,因为惯性将阻止加速度所产生的变化。
定义即可。许多读者通常对加速度方向符号感到迷惑。在程序内部加速度是通过惯性力施加到结构上的,而惯性力的方向与所施加的加速度的方向正好相反,因为惯性将阻止加速度所产生的变化。
对于如图4-155所示的悬臂梁,分别施加大小为9.8m/s2的加速度和重力,分析两个结果的异同。
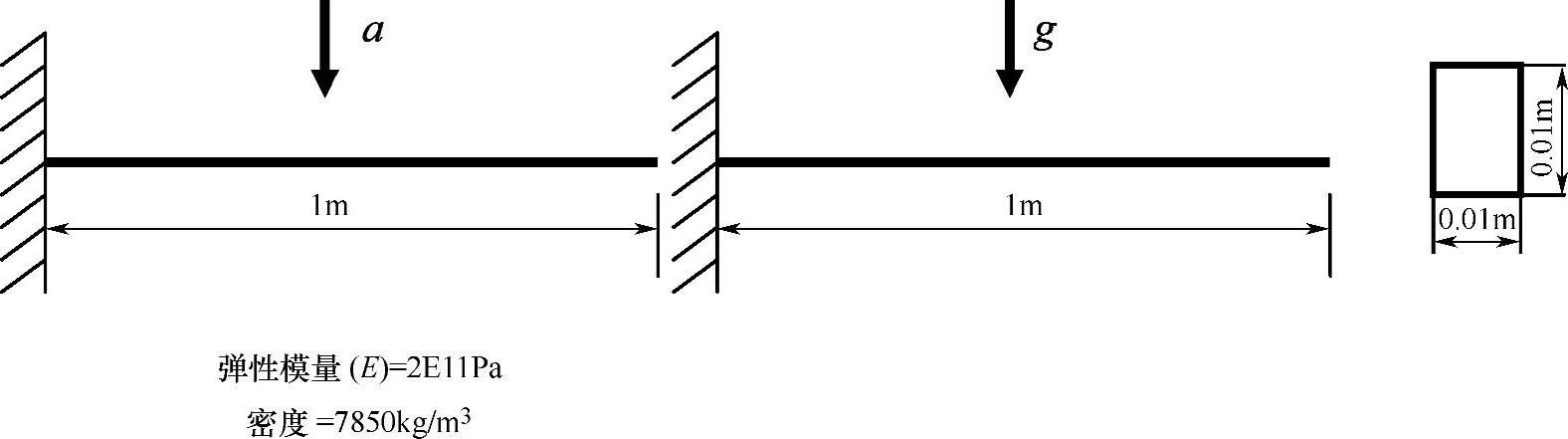
图4-155 给悬臂梁施加加速度和重力
打开随书光盘文件Acceleration_Gravity.wbpj,用鼠标左键单击项目树中的Static Structur-al(A5),然后单击鼠标右键,在弹出菜单中选择Acceleration,并按照图4-156所示在细节窗口定义力的大小和方向。
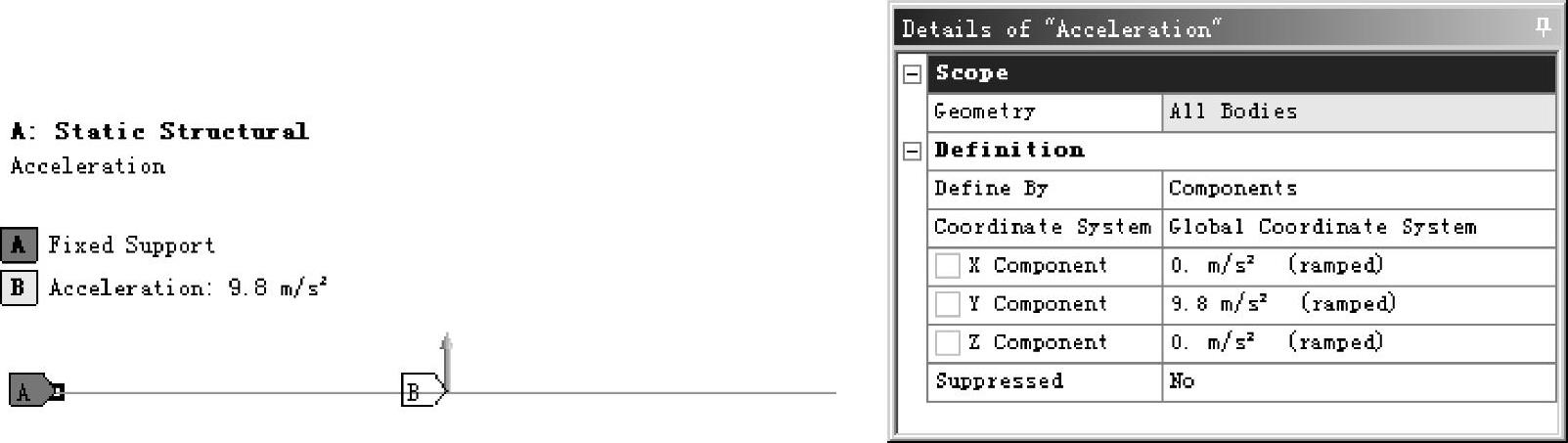
图4-156 施加加速度
单击工具栏上的
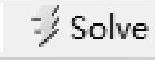 按钮。在项目树单击Maximum Combined Stress,查看应力分析结果,如图4-157所示。
按钮。在项目树单击Maximum Combined Stress,查看应力分析结果,如图4-157所示。
从图4-157中可以看出,虽然加速度的方向向上,由于在程序内部加速度是通过惯性力施加到结构上的,而惯性力的方向与所施加的加速度的方向正好相反,阻止加速度所产生的变化,所以惯性力的方向向下,梁向下弯曲。
在项目树中选择Acceleration,单击鼠标右键,在弹出菜单选择Delete,将项目树中的加速度Acceleration删除。
用鼠标左键单击项目树中的Static Structural(A5),然后单击鼠标右键,在弹出菜单中选择Standard Earth Gravity,并按照如图4-158所示在细节窗口定义力的大小和方向。
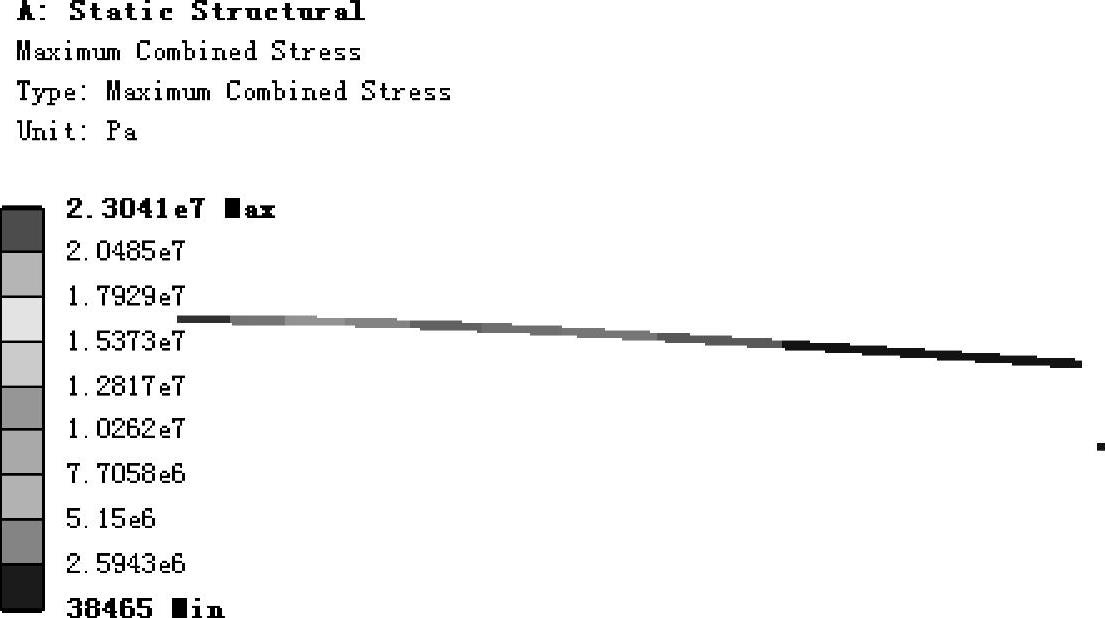
图4-157 施加向上的加速度的计算结果

图4-158 施加重力
从图中可以看出,标准的重力方向为沿着Z轴负方向,单击工具栏上的 按钮。在项目树中单击Maximum Combined Stress,查看应力分析结果,如图4-159所示。
按钮。在项目树中单击Maximum Combined Stress,查看应力分析结果,如图4-159所示。
图4-159 施加重力后的悬臂梁的变形
从图4-159可以看出,悬臂梁变形方向与重力施加方向相反。比较图4-157和图4-159,可以看出,二者应力计算结果基本相同,这是由于施加的加速度的大小和重力加速度基本相同。
3.旋转速度
旋转速度可以通过鼠标选中
 进行设置。默认情况下旋转速度的单位是每秒转过的弧度值,可以在Mechanical的Units菜单中改变单位,如图4-160所示。
进行设置。默认情况下旋转速度的单位是每秒转过的弧度值,可以在Mechanical的Units菜单中改变单位,如图4-160所示。
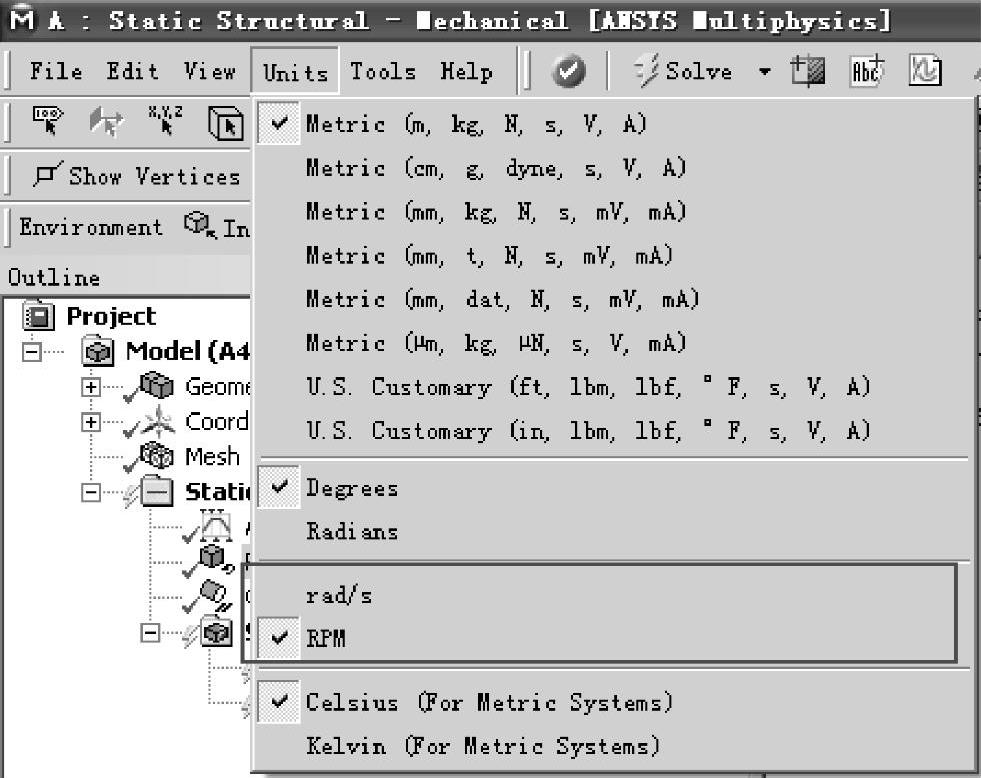
图4-160 改变旋转速度的单位
下面通过具体实例介绍旋转速度的定义方法。打开随书光盘文件Rotational velocity.wbpj,用鼠标左键单击项目树中的Static Structural(A5),然后单击鼠标右键,在弹出菜单中选择Rotational velocity,单击细节窗口Axis右侧的文本框,选择飞轮壳的内孔边缘,如图4-161所示,然后单击Apply按钮,在细节窗口单击Magnitude右侧的文本框,输入转速为3000r/min。
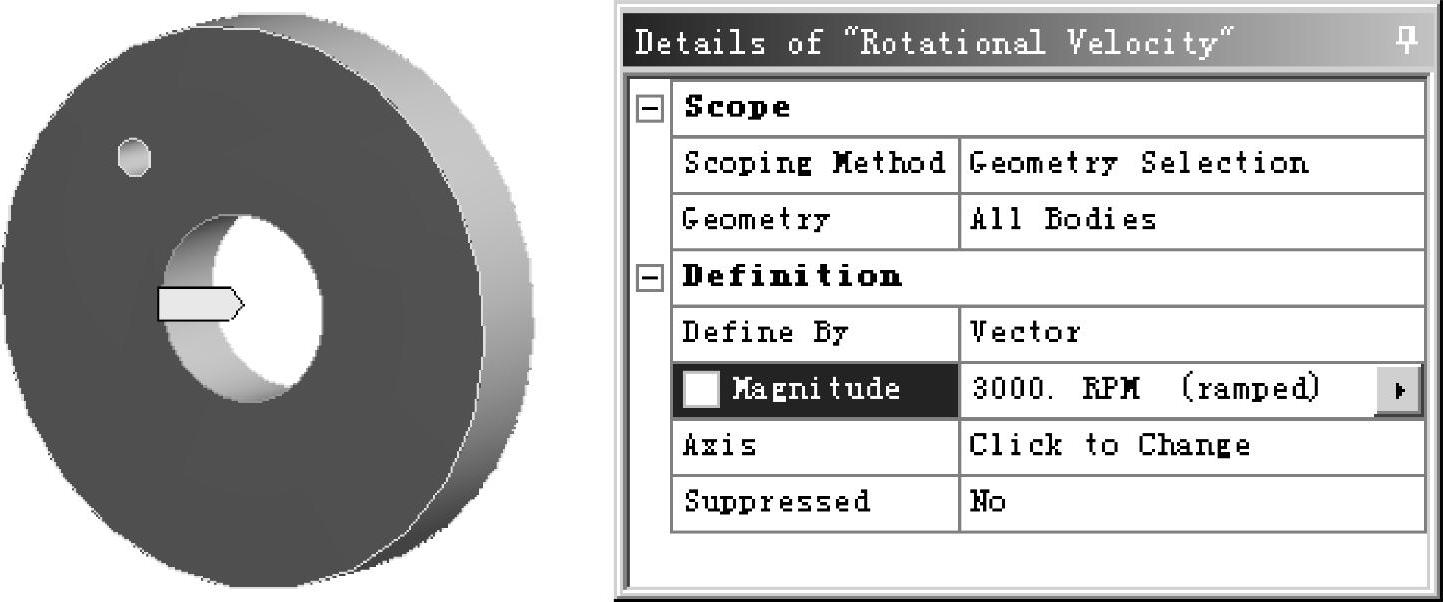
图4-161 定义旋转速度的大小和方向
单击工具栏中的 按钮。在项目树中单击Equivalence Stress,查看等效应力分析结果,如图4-162所示。在项目树中单击Total Deformation,查看变形分析结果,如图4-163所示。
按钮。在项目树中单击Equivalence Stress,查看等效应力分析结果,如图4-162所示。在项目树中单击Total Deformation,查看变形分析结果,如图4-163所示。
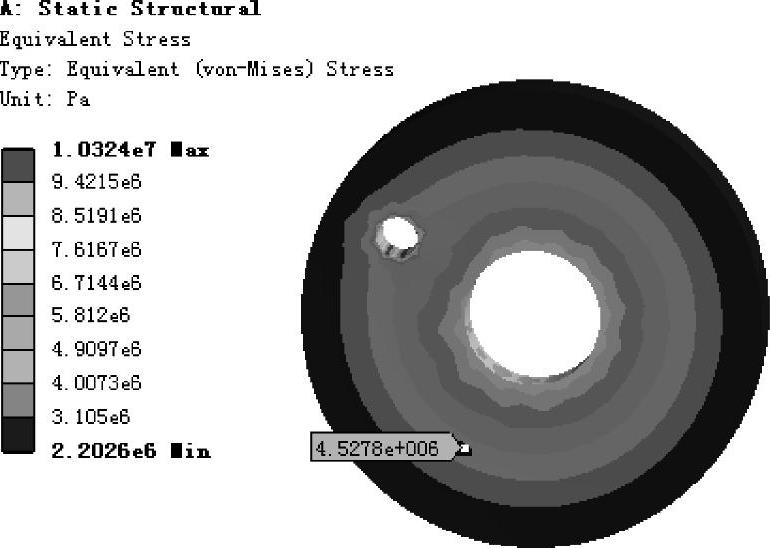
图4-162 等效应力分析结果
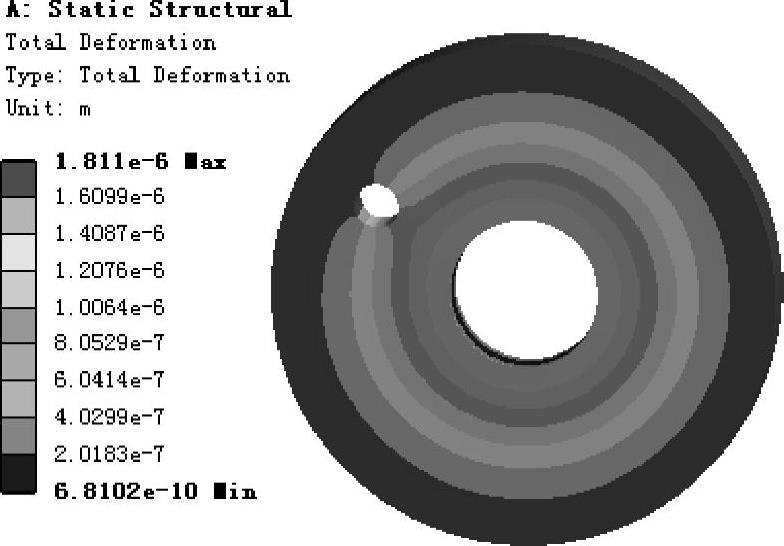
图4-163 变形分析结果
4.轴承载荷
轴承载荷 仅适用于圆柱形表面。其径向分量根据投影面积来分布压力载荷,而轴向载荷分量则沿着圆周均匀分布。另外还须注意,一个圆柱表面只能施加一个轴承载荷。假如一个圆柱表面切分为两部分,在施加轴承载荷时一定要保证这两个柱面都要选中。轴承载荷可以通过矢量和幅值来定义。
仅适用于圆柱形表面。其径向分量根据投影面积来分布压力载荷,而轴向载荷分量则沿着圆周均匀分布。另外还须注意,一个圆柱表面只能施加一个轴承载荷。假如一个圆柱表面切分为两部分,在施加轴承载荷时一定要保证这两个柱面都要选中。轴承载荷可以通过矢量和幅值来定义。
打开随书光盘文件bearing_load.wbpj,用鼠标左键双击A4—Model,用鼠标左键单击项目树中的Static Structural(A5),然后单击鼠标右键,在弹出菜单中选择Bearing Load,用鼠标左键单击工具栏上的选择过滤器 ,用鼠标左键单击选择空心轴的外表面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,并按照如图4-164所示在细节窗口定义力的大小和方向。
,用鼠标左键单击选择空心轴的外表面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,并按照如图4-164所示在细节窗口定义力的大小和方向。
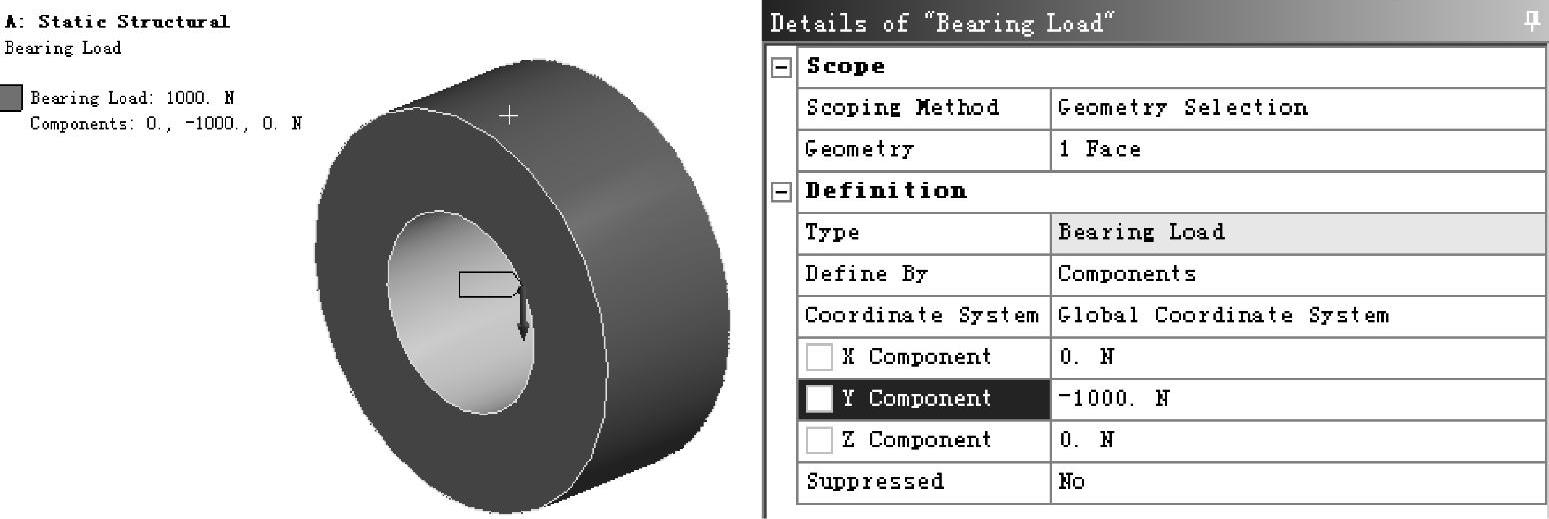
图4-164 施加轴承载荷
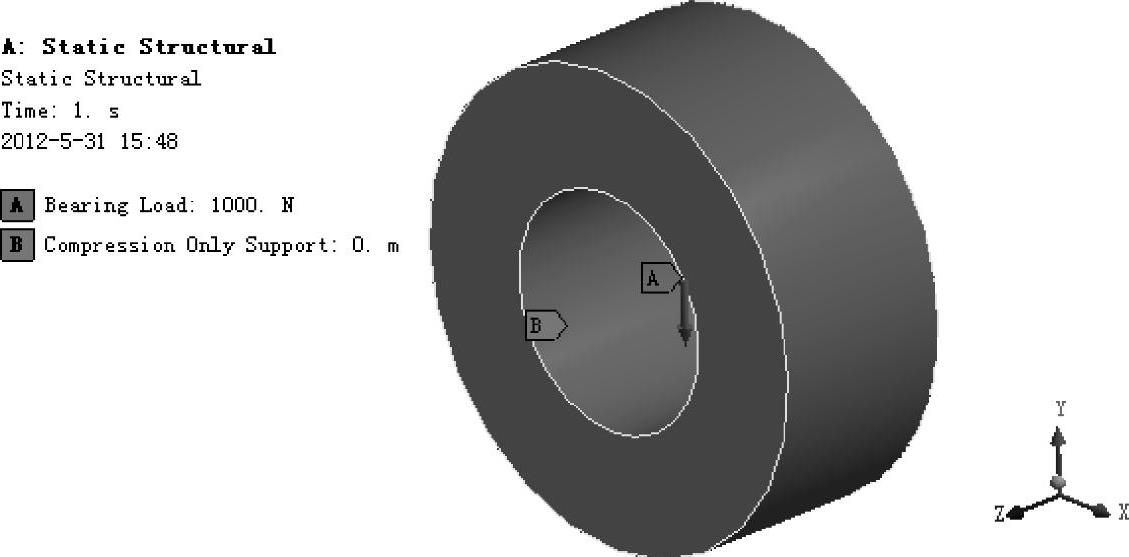
用鼠标左键单击项目树中的Static Structural(A5),然后单击鼠标右键,在弹出菜单中选择Compression Only Support,用鼠标左键单击工具栏中的选择过滤器
 ,用鼠标左键单击选择空心轴的内表面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,如图4-165所示。
,用鼠标左键单击选择空心轴的内表面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,如图4-165所示。
用鼠标左键单击项目树中的Static Structural(B5),然后单击鼠标右键,在弹出菜单中选择Force,用鼠标左键单击工具栏上的选择过滤器 ,用鼠标左键单击选择空心轴的外表面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,并按照如图4-166所示在细节窗口定义力的大小和方向。
,用鼠标左键单击选择空心轴的外表面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,并按照如图4-166所示在细节窗口定义力的大小和方向。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-165 在空心轴的内表面施加支撑约束
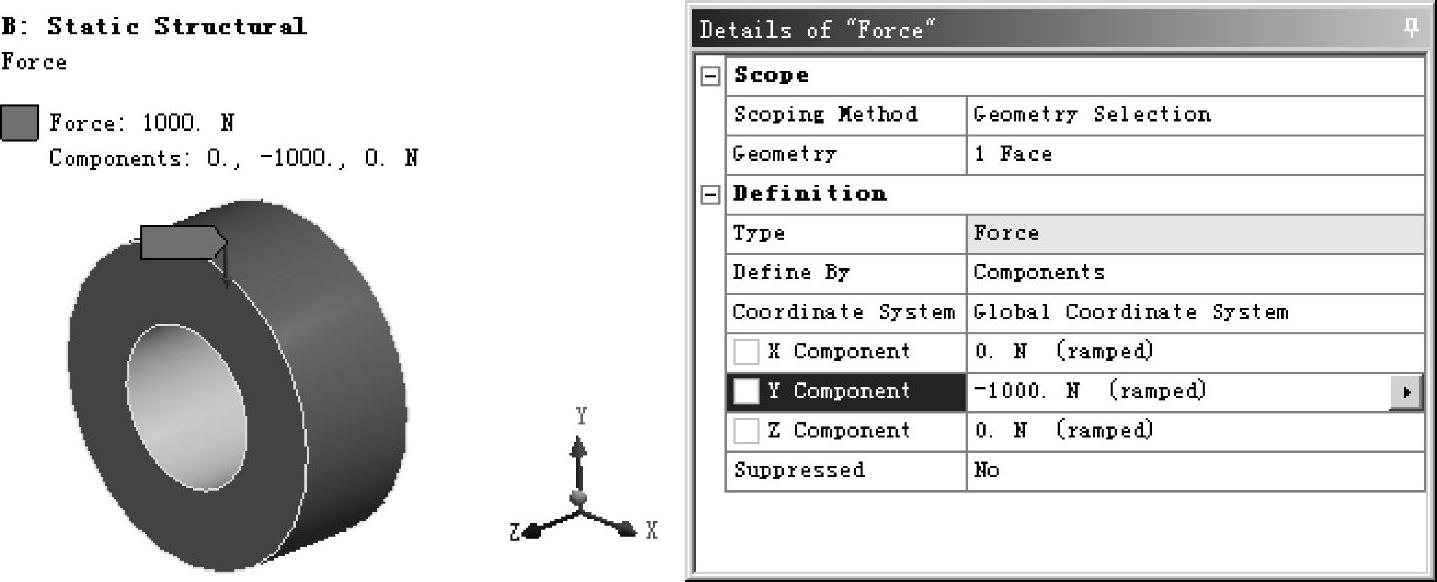
图4-166 在空心轴外表面施加力
用鼠标左键单击项目树中的Static Structural(B5),然后单击鼠标右键,在弹出菜单中选择Compression Only Support,用鼠标左键单击工具栏中的选择过滤器 ,用鼠标左键单击选择空心轴的内表面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮。
,用鼠标左键单击选择空心轴的内表面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮。
单击工具栏上的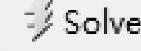 按钮。在项目树单击A6—Maximum Principal Stress和B6—Maxi-mum Principal Stress,查看应力分析结果。
按钮。在项目树单击A6—Maximum Principal Stress和B6—Maxi-mum Principal Stress,查看应力分析结果。
从图4-167a可以看出,对于轴承载荷,载荷的径向分量根据投影面积来分布压力载荷,
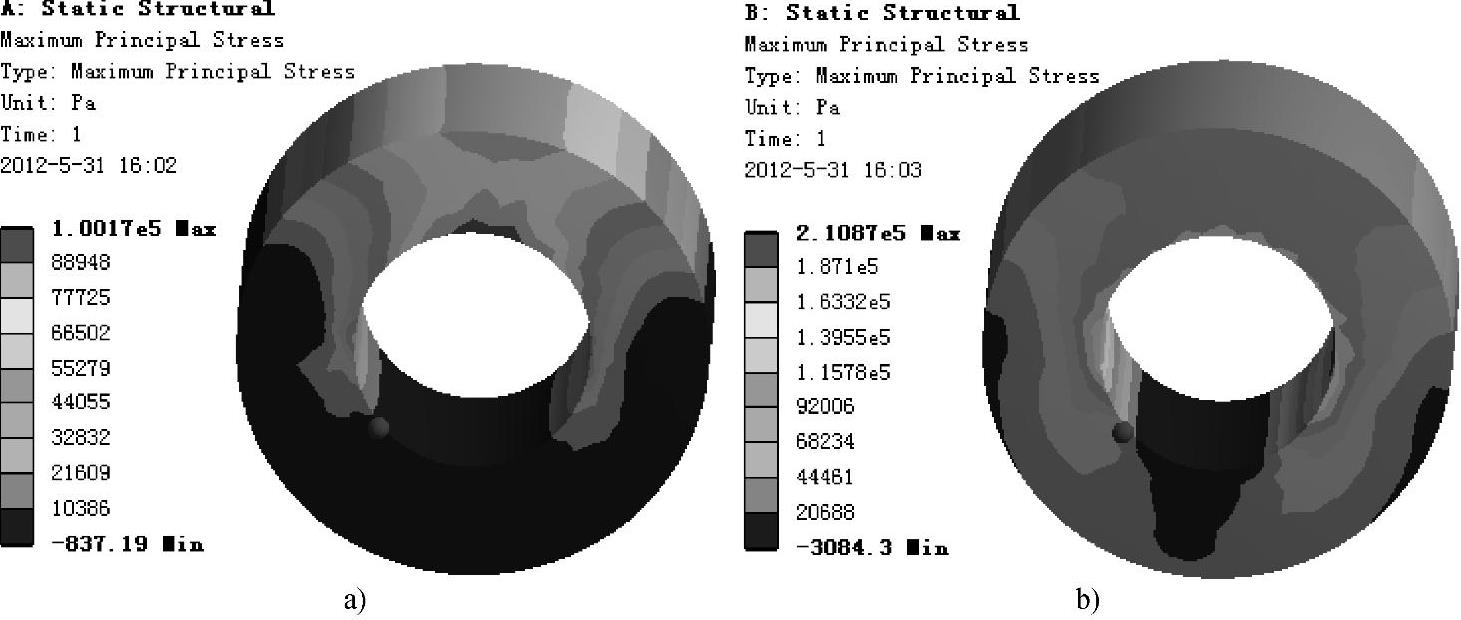
图4-167 两种载荷下空心轴应力分布
a)A6—Maximum Principal Stress b)B6—Maximum Principal Stress
图4-167b是力沿着径向分量根据投影面积均匀分布的计算结果。
5.力矩载荷
力矩可以施加在任意实体的表面。假如选择了多个表面,力矩将分摊在这些表面上。力矩也可以通过矢量及其大小定义。当用矢量表示时,力矩遵守右手螺旋法则。
例如,一根梁,在其两端承受力偶1200lbf·in作用,如图4-168所示。该梁是钢的,矩形截面的宽度是1in,高度是2in。试求梁中的最大的弯曲应力。
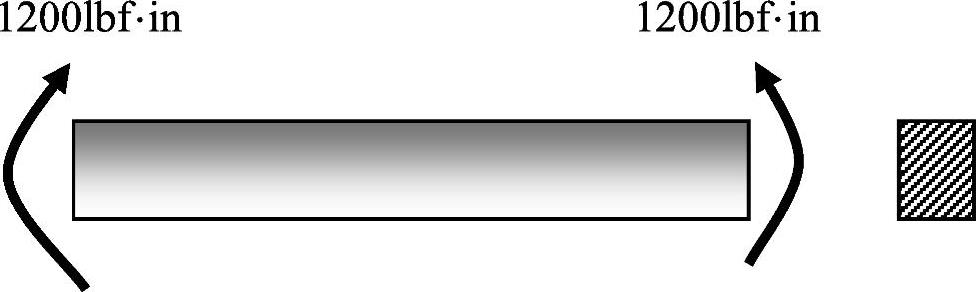
图4-168 钢梁承受力矩载荷
打开随书光盘文件Load Monment.wbpj,用鼠标左键双击A4—Model,启动ANSYS Workbench Mechanical,图形区显示梁的模型和约束如图4-169所示。
图4-169 梁的模型和约束
用鼠标左键单击项目树中的Static Structural(A5),然后单击鼠标右键,在弹出菜单中选择Moment,用鼠标左键单击选择过滤器按钮 ,选择和约束平面相对应的平面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,在细节窗口输入力矩大小为12000lbf·in,用鼠标左键单击选择过滤器按钮
,选择和约束平面相对应的平面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,在细节窗口输入力矩大小为12000lbf·in,用鼠标左键单击选择过滤器按钮 ,力矩所在平面上的线,如图4-170所示。
,力矩所在平面上的线,如图4-170所示。
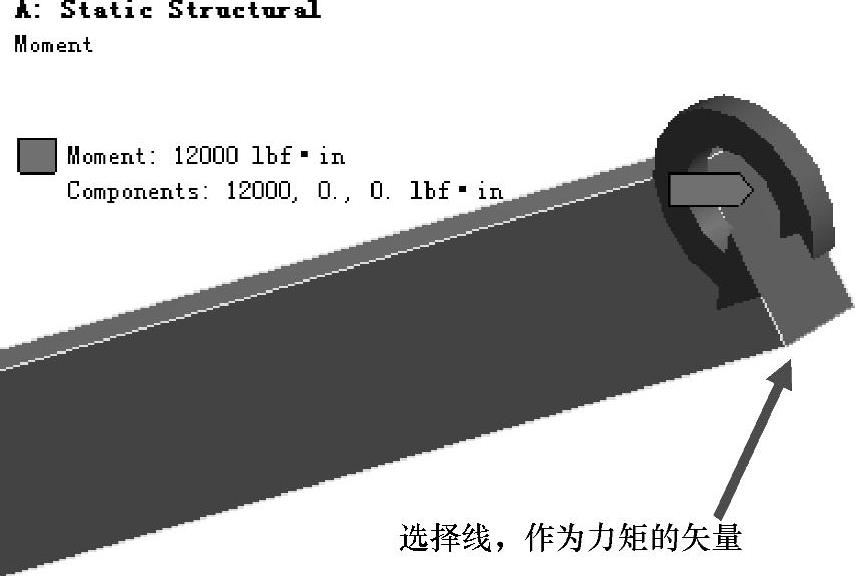
图4-170 力矩所在平面和定义力矩的矢量
力矩设置完毕后,细节窗口如图4-171所示。
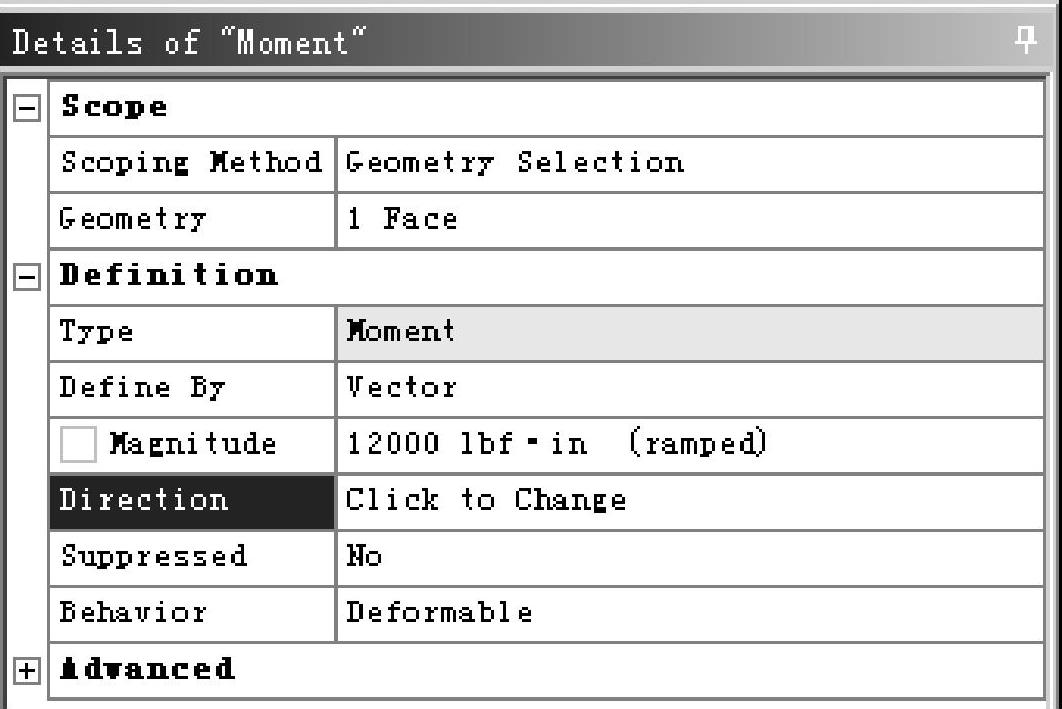
图4-171 力矩定义的细节窗口设置
单击工具栏上的 按钮。在项目树单击Maximum Principal Stress,查看应力分析结果。由材料力学知识可以知道,尽管在梁的两端出现应力最大点,这是边界条件与题目要求的差异造成的,可以忽略。应力最大点在梁的上表面,在工具栏单击探针按钮
按钮。在项目树单击Maximum Principal Stress,查看应力分析结果。由材料力学知识可以知道,尽管在梁的两端出现应力最大点,这是边界条件与题目要求的差异造成的,可以忽略。应力最大点在梁的上表面,在工具栏单击探针按钮 ,单击梁的中部上表面(远离边界条件施加位置),应力结果如图4-172所示。这一计算结果与解析解完全相同。
,单击梁的中部上表面(远离边界条件施加位置),应力结果如图4-172所示。这一计算结果与解析解完全相同。
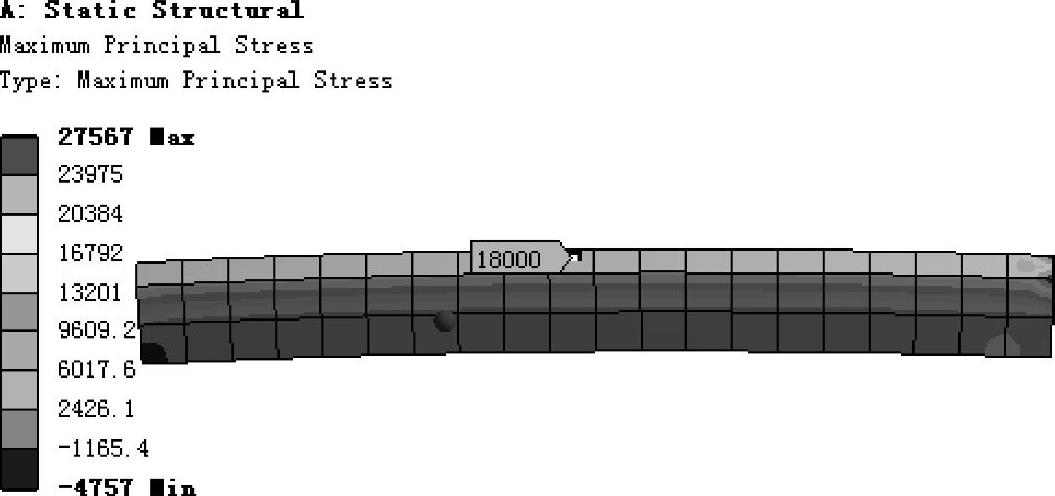
图4-172 应力分析结果
6.远端载荷

远端载荷是Mechanical中比较有“特色”的载荷。实际上读者要真正理解和灵活有效地运用Remote Force,需要先理解理论力学(刚体力学)中力的平移定理、固体力学中的圣维南原理以及力学中的等效原理。例如,在某一面上加载了一个远端载荷后,相当于在这个面上将得到一个等效的力加上由于偏置的力所引起的力矩。
承受集中力作用的悬臂梁如图4-173所示,截面形状为T形。求梁中的最大弯曲应力。为了演示远端载荷的作用效果,这里在建模过程中将梁的长度定义为1m,在距离悬臂点2m的部位施加垂向载荷。
打开随书光盘文件Load Monment.wbpj,用鼠标左键双击A4—Model,启动ANSYS
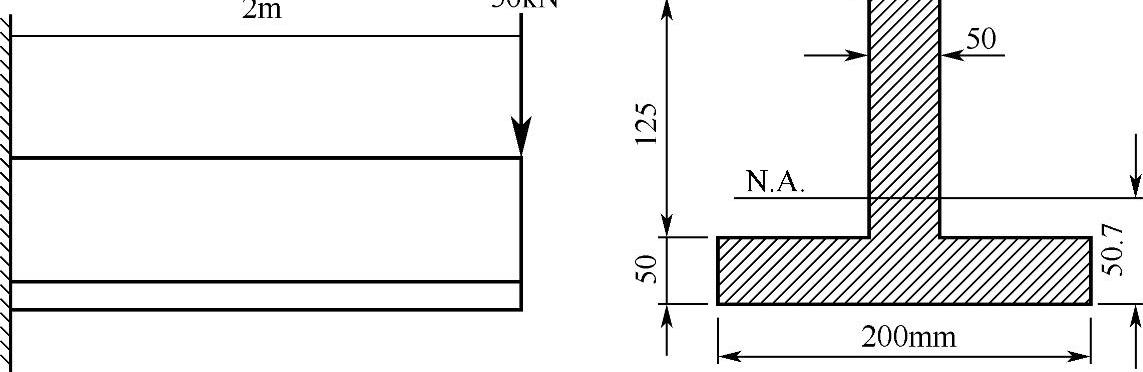
图4-173 T形梁的受力分析
Workbench Mechanical,图形区显示梁的模型和约束如图4-174所示。
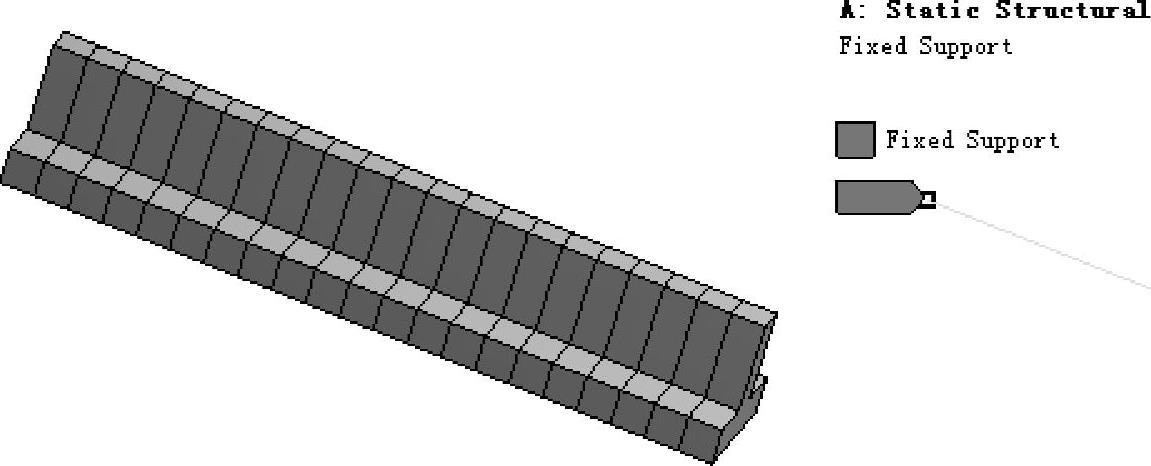
图4-174 T形梁模型及其约束
用鼠标左键单击项目树中的Static Structural(A5),然后单击鼠标右键,在弹出菜单中选择Remote Force,用鼠标左键单击选择过滤器按钮 ,选择和约束端点相对应的端点,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,在细节窗口按照如图4-175所示进行设置。从图中可以看出,施加载荷的X坐标为2m,而实际上梁的长度只有1m,这就是远端载荷的特点。
,选择和约束端点相对应的端点,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,在细节窗口按照如图4-175所示进行设置。从图中可以看出,施加载荷的X坐标为2m,而实际上梁的长度只有1m,这就是远端载荷的特点。
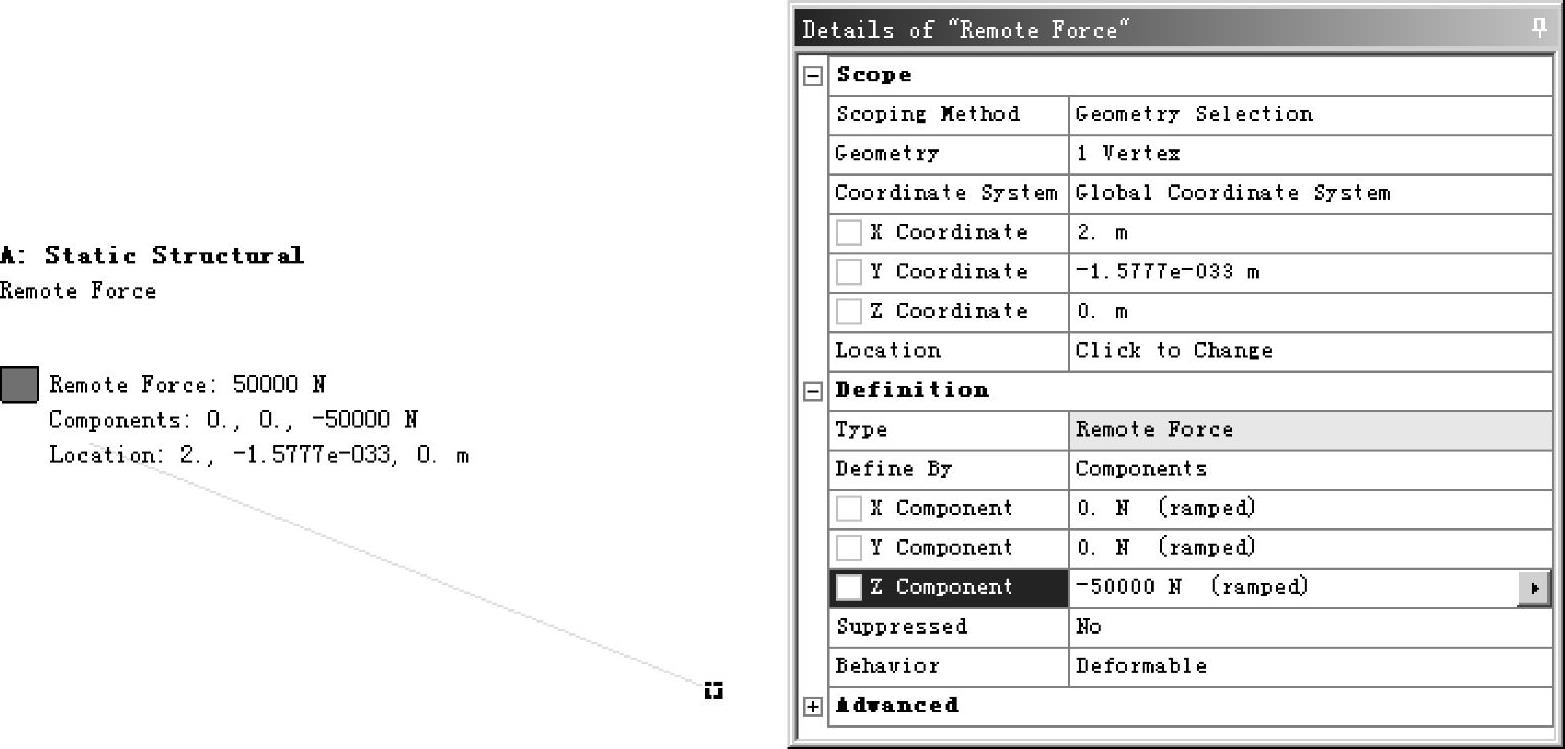
图4-175 施加远端载荷
单击工具栏上的 按钮。在项目树单击Maximum Principal Stress,查看应力分析结果,如图4-176所示。
按钮。在项目树单击Maximum Principal Stress,查看应力分析结果,如图4-176所示。
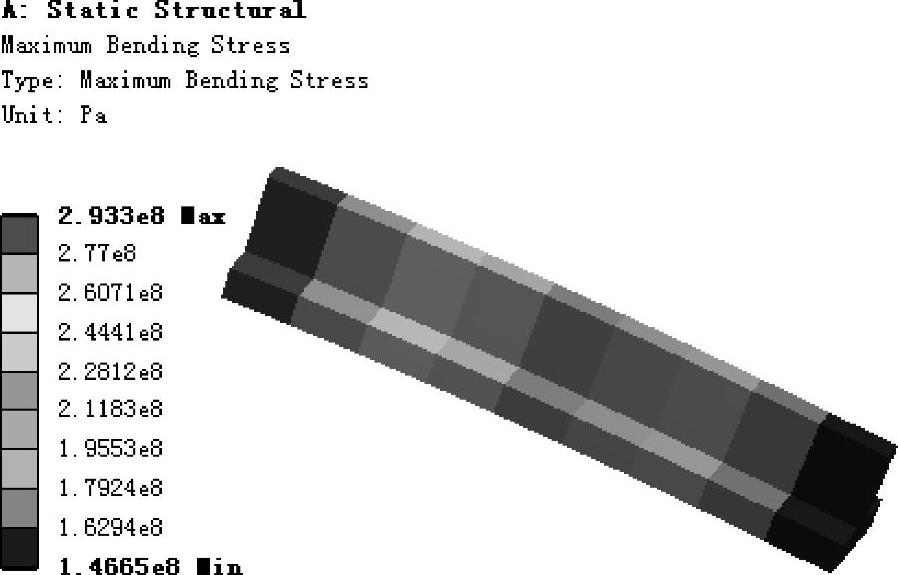
图4-176 采用远端载荷最大弯曲应力计算结果
在随书光盘文件Load_Monment.wbpj中的B流程中,按照梁的完整尺寸建立的有限元模型及其计算结果如图4-177所示。
图4-177 采用实际模型最大弯曲应力计算结果
比较图4-176和图4-177的计算结果可以看出,最大弯曲应力的计算结果相同。
7.螺栓载荷
在Mechanical中加载螺栓连接要注意:只能在3D模拟中加载。螺栓载荷能够加在圆柱形表面,但是需要一个以Z轴为主方向的局部坐标系。
如图4-178所示,一个半圆柱,在半圆柱上模拟螺栓载荷,半圆柱两端施加固定约束,半圆柱表面施加无摩擦约束,施加螺栓预紧力为19.635N。通过这一实例,演示螺栓预紧力的施加方法。
打开随书光盘文件bolt pretension.wbpj,用鼠标左键双击A4—Model,启动ANSYS Workbench Mechanical,图形区显示梁的模型和约束如图4-179所示。
用鼠标左键单击项目树中的Static Structural(A5),然后单击鼠标右键,在弹出菜单中选择Bolt Pretension,用鼠标左键单击选择过滤器按钮 ,选择圆柱面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,在细节窗口输入预紧力大小为19.635N,设置完毕后如图4-180所示。
,选择圆柱面,接下来用鼠标左键单击细节窗口Geometry右侧的Apply按钮,在细节窗口输入预紧力大小为19.635N,设置完毕后如图4-180所示。
单击工具栏上的 按钮。在项目树单击Directional Deformation,查看Z方向变形分析结果,如图4-181所示。
按钮。在项目树单击Directional Deformation,查看Z方向变形分析结果,如图4-181所示。
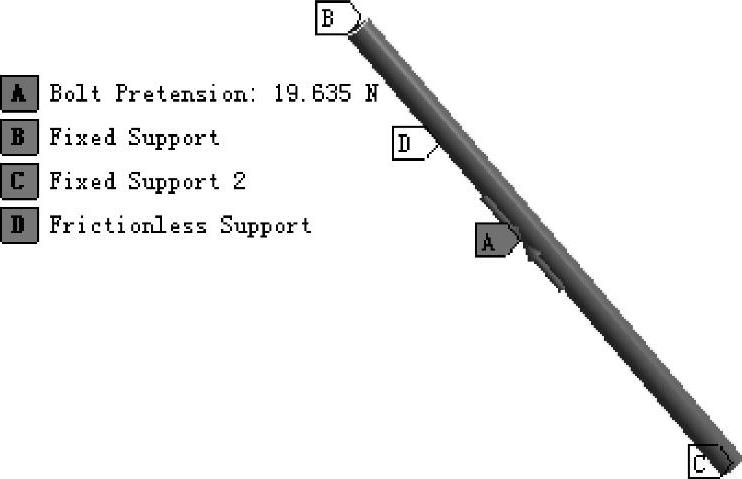
图4-178 模拟螺栓预紧力
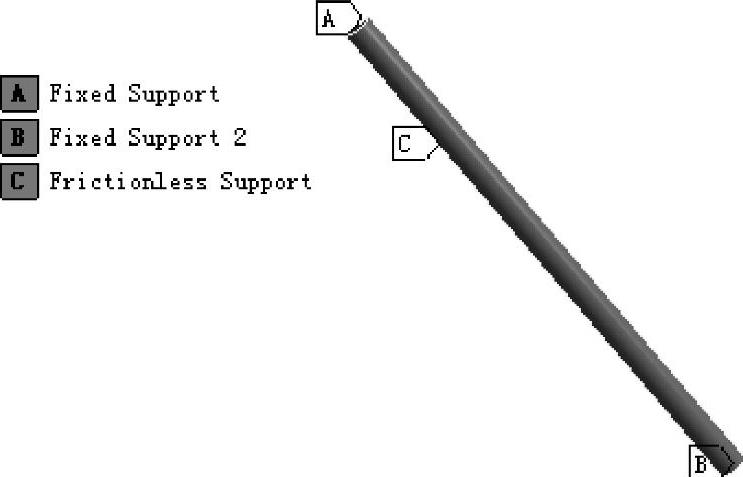
图4-179 模拟螺栓约束条件
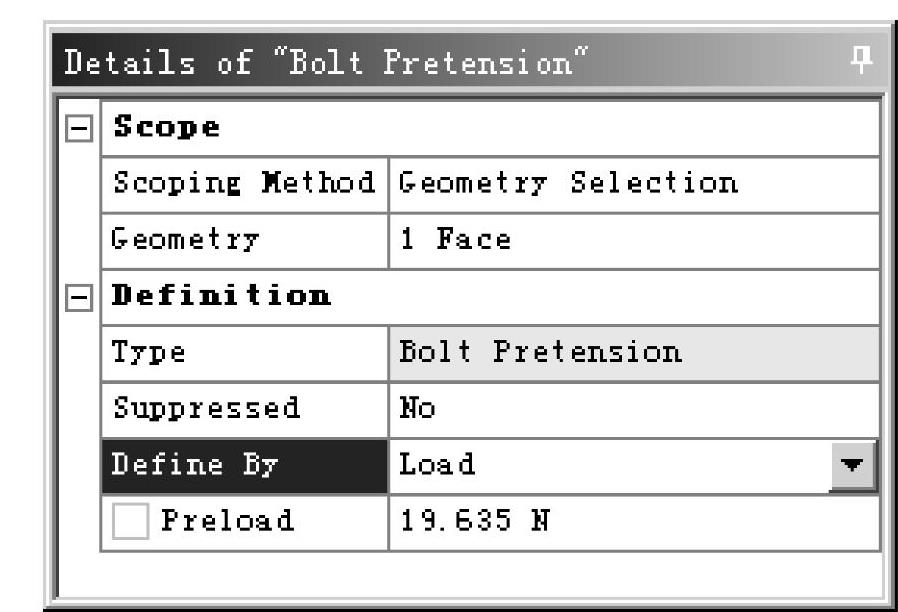
图4-180 螺栓预紧力设置
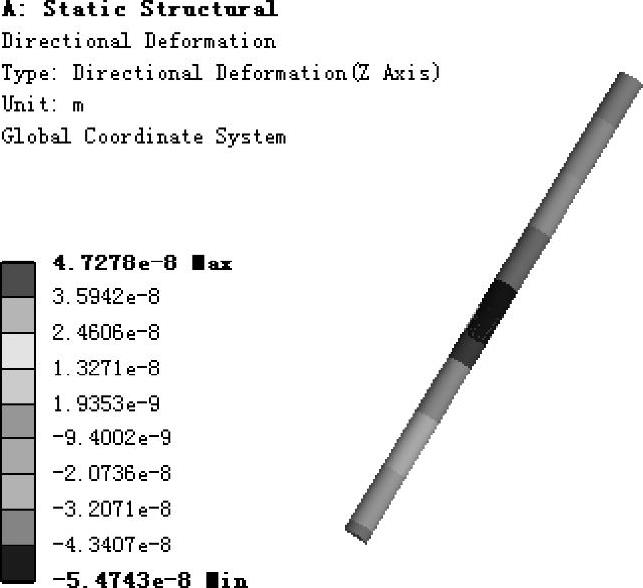
图4-181 最大变形分析结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。