



自动扶梯的制动系统包括工作制动器和附加制动器。
(1)工作制动器 工作制动器一般装在电动机高速轴上(图4-5),在动力电源或控制电源失电时,能使自动扶梯经过一个几乎是匀减速的制停过程使其停止运行,并保持停止状态。工作制动器应使用机-电式制动器或其他制动器来完成。能用手释放的制动器,应由手的持续力使制动器保持松开状态。
1)机-电式制动器应持续通电来保持正常释放。在制动电路断开后,制动器应立即制动。制动力应通过一个(或多个)带导向的压缩弹簧来产生。制动器释放装置不应产生自激。工作制动器供电的中断至少应有两套独立的电气装置来实现,这些装置可以切断驱动主机供电的装置。如自动扶梯或自动人行道停车以后,这些电气装置中的任一个还没有断开,则不能重新启动。
2)工作制动器的制动载荷和制停距离。
①自动扶梯制动载荷的确定。图4-6为扶梯梯级结构示意图,在制动试验时,允许将总制动载荷分布在工作面2/3的梯级上,受载的梯级数量由“提升高度除以最大可见梯级踢板高度”求得。表4-2自动扶梯制动载荷。
表4-2 自动扶梯制动载荷试验工况表

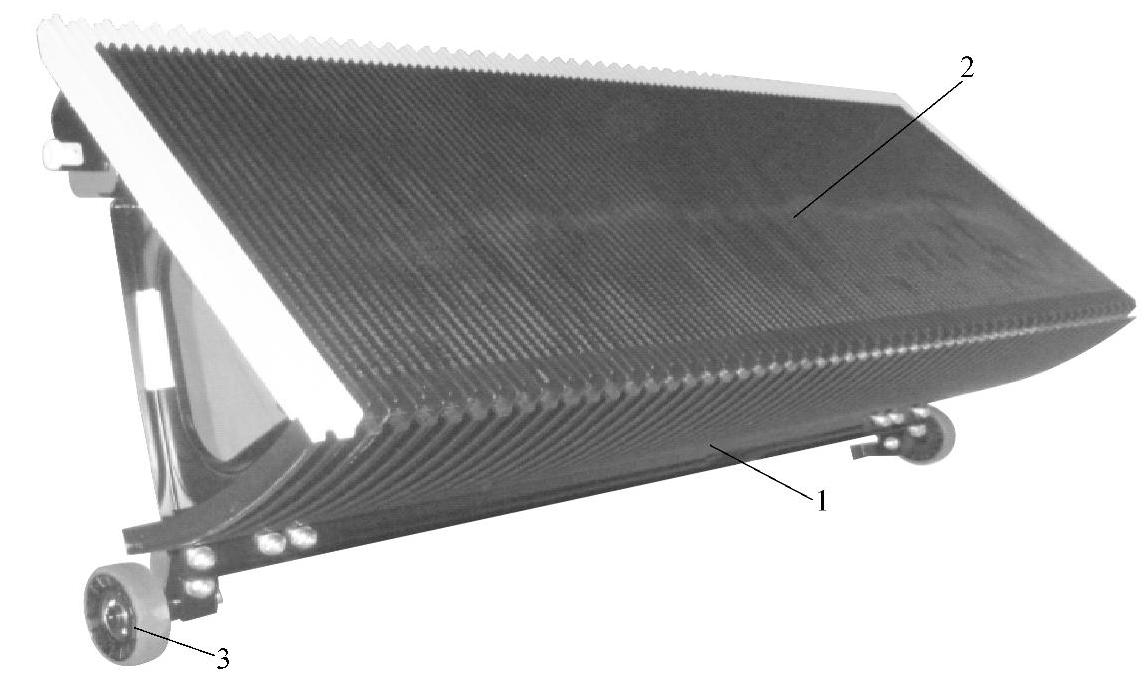
图4-6 扶梯梯级结构示意图
1—踢板 2—踏板面 3—副轮
②自动扶梯的制停距离(表4-3)。自动人行道的制停距离应从电气停止装置动作时开始测量。自动扶梯向下运行时,制动器制动过程中沿运行方向上的减速度不应大于1m/s2。
表4-3 自动扶梯的制停距离

①不包括端点数值。
③自动人行道制动载荷的确定。表4-4为自动人行道制动载荷试验工况表,对于其长度范围内有多个不同倾斜角度(高度不同)的自动人行道来说,在确定制动载荷时,应只考虑向下运行的区段。
表4-4 自动人行道制动载荷试验工况表

④自动人行道的制停距离(表4-5)。如果速度在上述范围之间,制动距离用插入法计算。制停距离应从电气制动装置动作时开始测量。自动人行道水平运行或向下运行时,制动器制停过程中沿运行方向上的减速度不应大于1m/s2。对有载的自动人行道,制造厂商应以计算验证其制停距离。
表4-5 自动人行道的制停距离(https://www.xing528.com)

①不包括端点数值。
(2)附加制动器 当自动扶梯的工作制动器和梯级、踏板或传送带驱动轮之间不是用轴、齿轮、多排链条或多根单排链条连接的,或工作制动器不是标准规定的机-电式制动器,或自动扶梯提升高度超过6m,或公共交通型的自动扶梯和倾斜式自动人行道,都必须设置附加制动器。
1)附加制动器的工作原理。图4-7为附加制动器实样图,图4-8为附加制动器的安装位置示意图。附加制动器应为机械式的,利用摩擦原理使具有制动载荷的自动扶梯或自动人行道有效地减速停止下来,并使其保持静止状态。附加制动器应在自动扶梯速度超过名义速度1.4倍之前和在梯级、踏板或传送带改变其规定运行方向时动作。
2)附加制动器的动作模式。传动链轮带动驱动主轴,呈不对称扇形的制动块装在圆盘上。压簧和挡块也装在圆盘上,压簧将制动块压紧在传动链轮的内侧,使圆盘在传动链轮转动时也一起转动。当传动链断裂或自动扶梯运行速度接近名义速度的1.4倍时,通过传感装置使电磁铁动作。电磁铁拉动拉杆而带动止动块转一角度,使其挡住挡块,圆盘停止转动,通过扇形制动块的摩擦作用也使传动链轮和驱动主轴紧急制动。与此同时拉杆上的角形件与开关相撞切断主机电源,使主机停止转动。速度传感器的任务可由速度监控装置来担任,断链则应另有断链开关。
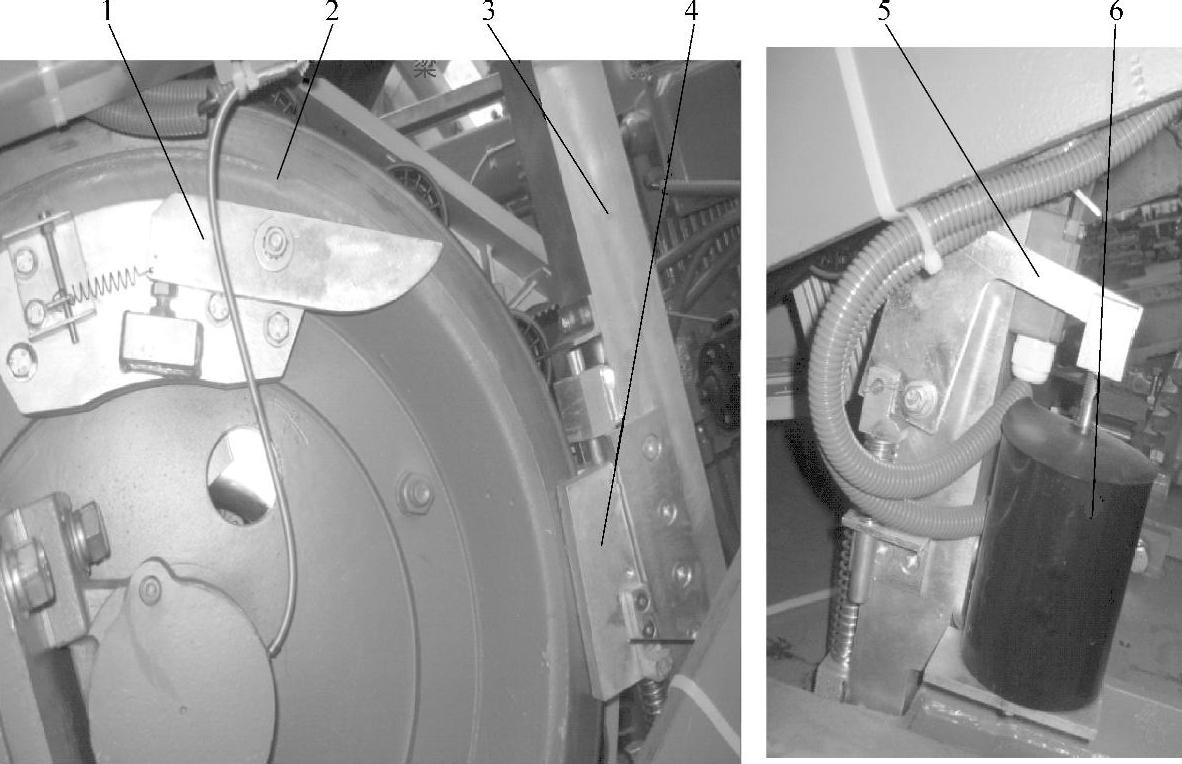
图4-7 附加制动器实样
1—回位杠杆 2—制动盘 3—制动器钢带 4—制动块 5—角铁 6—电磁铁
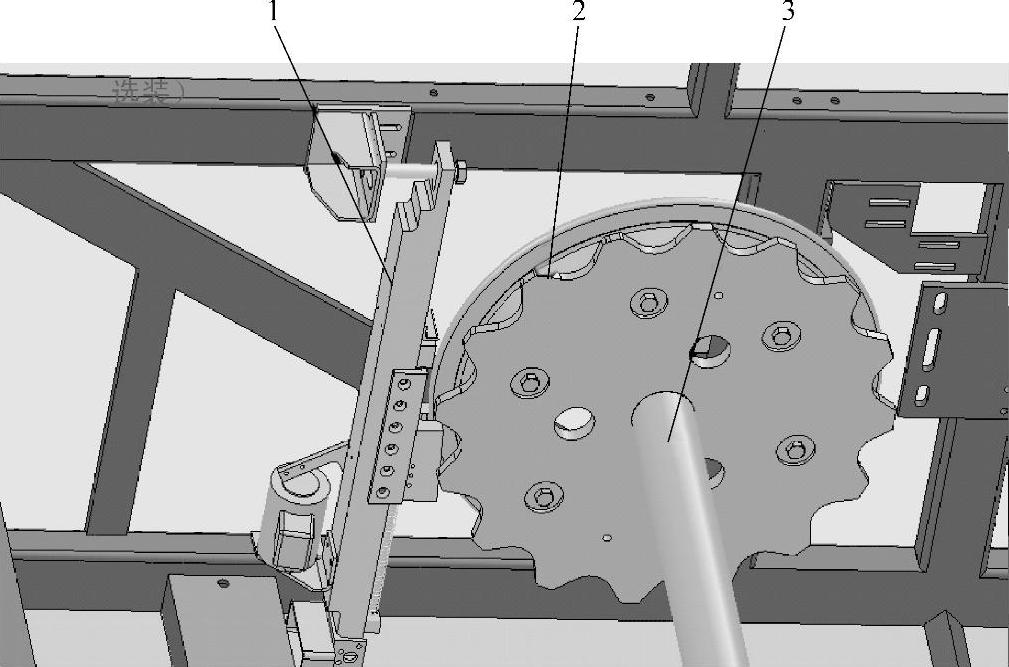
图4-8 附加制动器安装位置示意图
1—附加制动器(可选装) 2—制动器圆盘 3—主驱动
(3)超速保护和非操纵逆转保护
1)自动扶梯和自动人行道应配备速度限制装置,使其在速度超过名义速度1.2倍之前自动停车。为此,所用的速度限制装置在速度超过名义速度1.2倍之前,能切断自动扶梯或自动人行道的电源。
2)自动扶梯和α≥6°的倾斜式自动人行道应设置一个装置,使其在梯级、踏板或传送带改变规定运行方向时自动停止运行。
3)超速保护和非操纵逆转保护工作原理:防逆转装置如图4-9所示,旋转编码器检测电动机速度并和微机内的设定值比较,如果检测到速度下降至额定速度的20%时,工作制动器动作,如果检测到速度为0前,工作制动器与附加制动器同时动作。
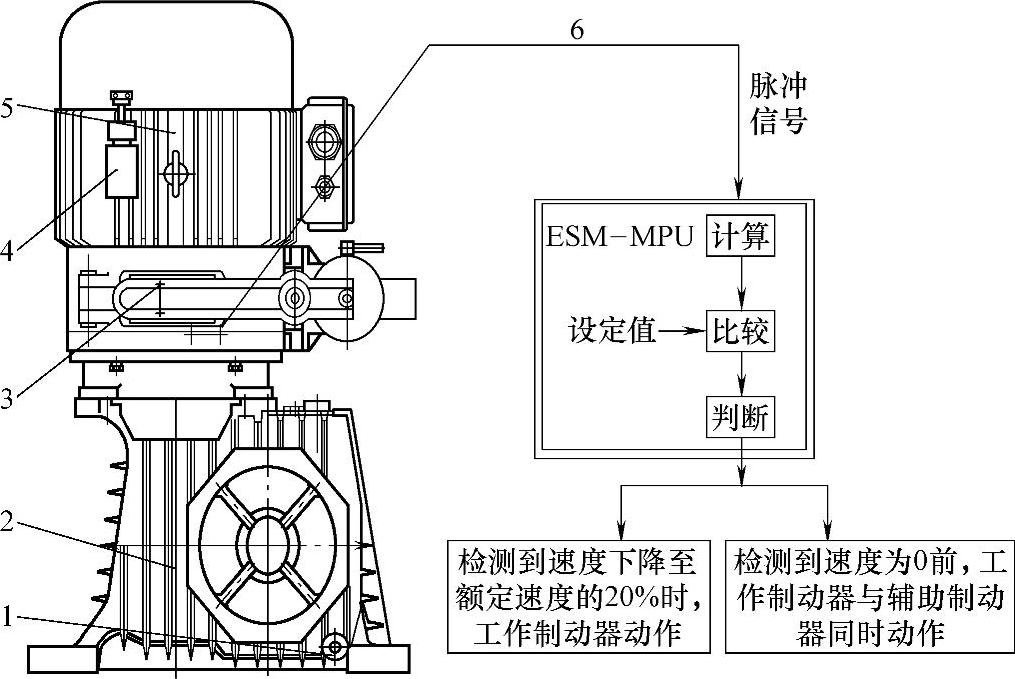
图4-9 自动扶梯的防逆转装置
1—排油口 2—减速器 3—制动器闸衬磨损检测装置(电气) 4—风扇罩安全开关(调整开关使得风扇罩装上时开关闭合)5—电动机6—用于制动距离测量的速度传感器
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。