



【摘要】:得到四辆车在整个仿真过程中的行驶轨迹。几台车辆排成队列稳定行驶。最终在1h的时间内,行驶了110km,与高速公路的实际情况基本相符。图2-8 车队整体轨迹图图2-9 初始1km车辆轨迹图在初始1km的范围内,由于车辆的速度方向波动较大,车辆之间的影响以及道路环境对车辆行驶状态的影响较大。图2-12 12最后时刻车队轨迹示意图
依据前面所建立的改进的人工鱼模型,本节进行车辆队列保持的仿真与模拟。在道路所在平面建立直角坐标系,以道路横向位移为x坐标,以道路纵向位移为y坐标。得到四辆车在整个仿真过程中的行驶轨迹。车队整体的轨迹如图2-8所示,车队在行驶初期会在道路限制范围内交错摆动,随后经过一段时间的调整后进入稳定期。几台车辆排成队列稳定行驶。最终在1h的时间内,行驶了110km,与高速公路的实际情况基本相符。
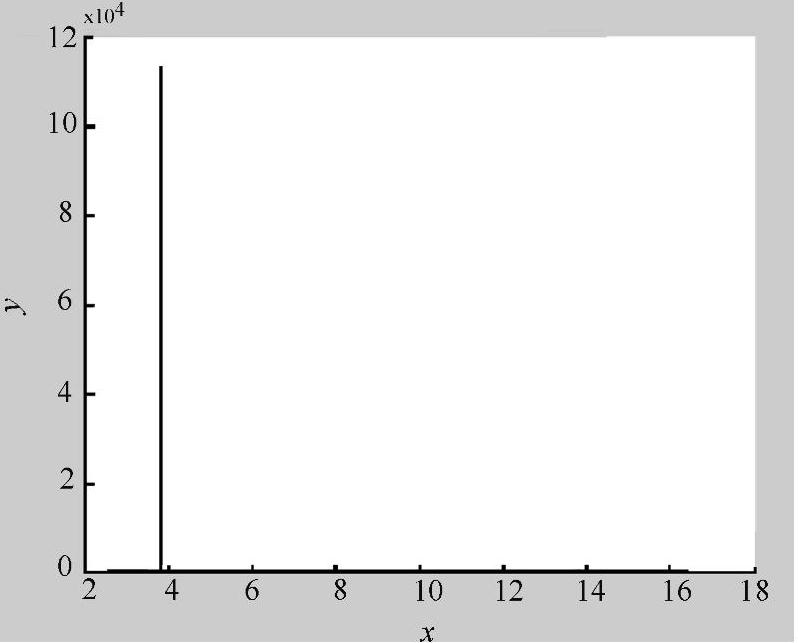
图2-8 车队整体轨迹图
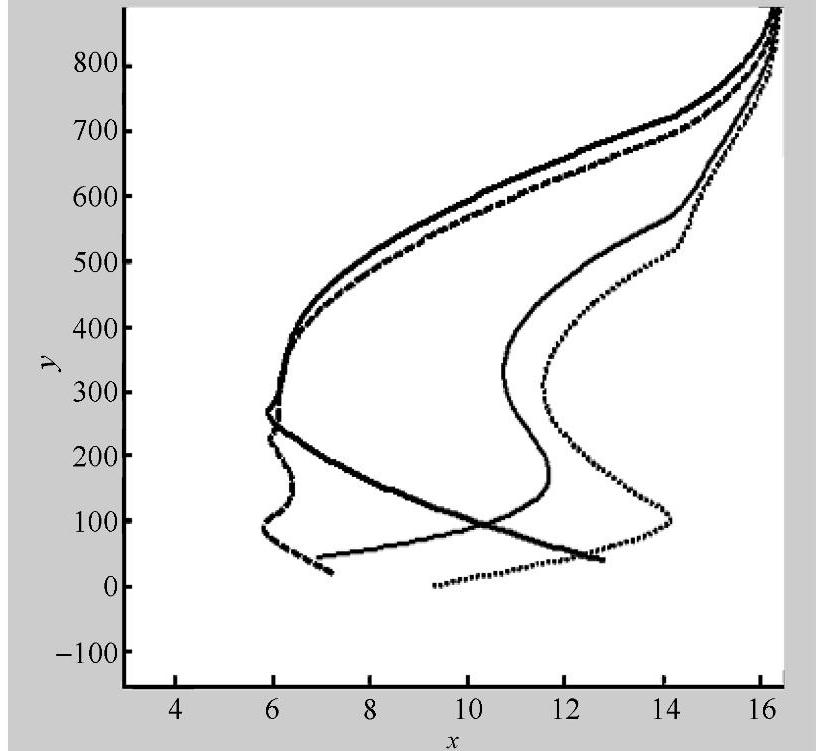
图2-9 初始1km车辆轨迹图
在初始1km的范围内,由于车辆的速度方向波动较大,车辆之间的影响以及道路环境对车辆行驶状态的影响较大。此时四车的轨迹会在x(0,20)范围内进行交错,体现出鱼群行为中的移动行为模型的影响,如图2-9所示。
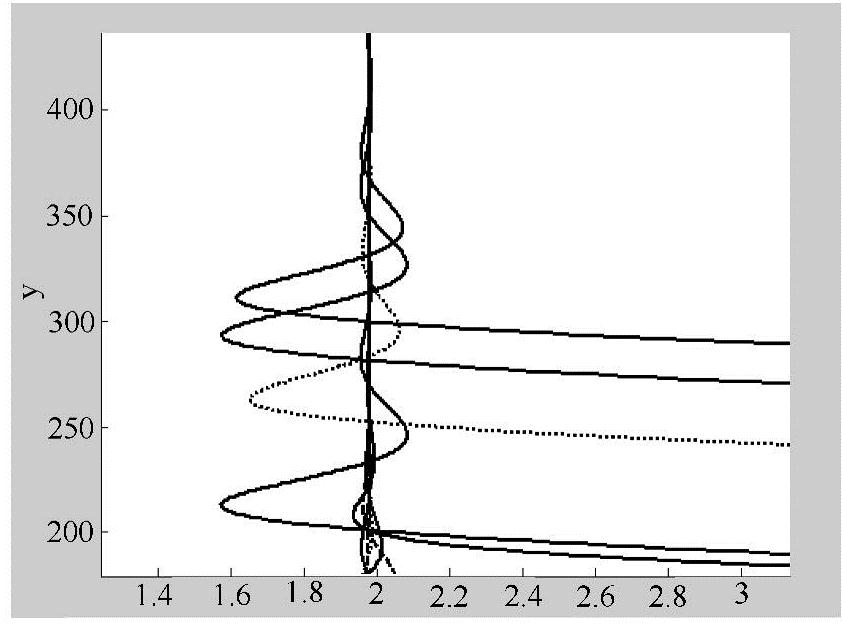
由于初始化时车辆的位置、速度、方向都是随机设定的,车辆轨迹在从不稳定到稳定的过程中,会出现两种不同的情况,一种如图2-10所示车队在经过一定时间的小幅摆动后,组成队列稳定行驶。还有一种情况如图2-11所示,几车一直处于小幅波动的状态下,振幅越来越小,1km之后几乎可以忽略不计,近似为组成队列,稳定行驶。这两种情况,都是符合预期的。
 (https://www.xing528.com)
(https://www.xing528.com)
图2-10 车队轨迹摆动示意图
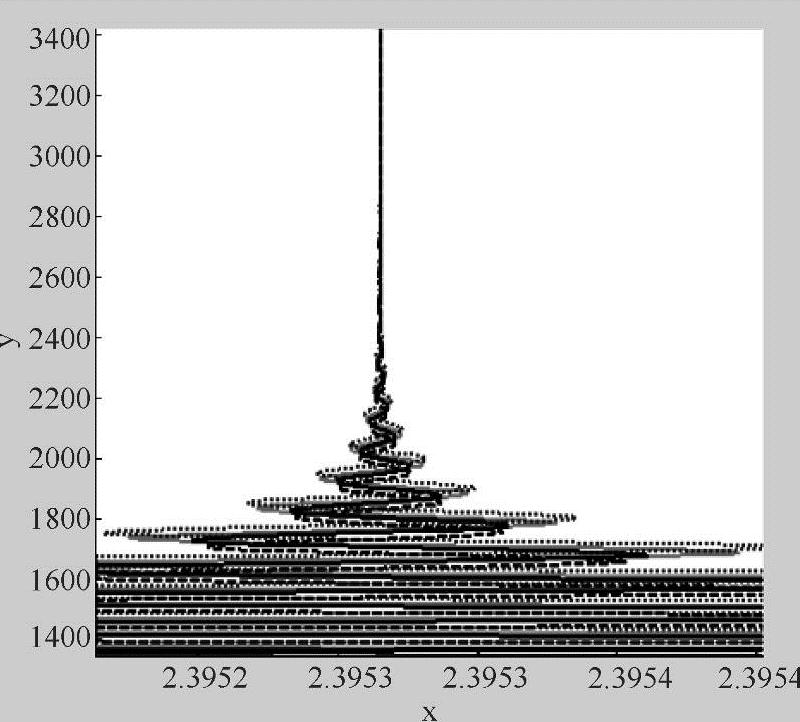
图2-11 小幅振荡过程
在最后时刻车辆轨迹如图2-12所示,几条不同颜色的轨迹线最后时刻的位置代表了车辆之间的间距,这也证明了几车之间一直跟驰行驶。
图2-12 12最后时刻车队轨迹示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。