



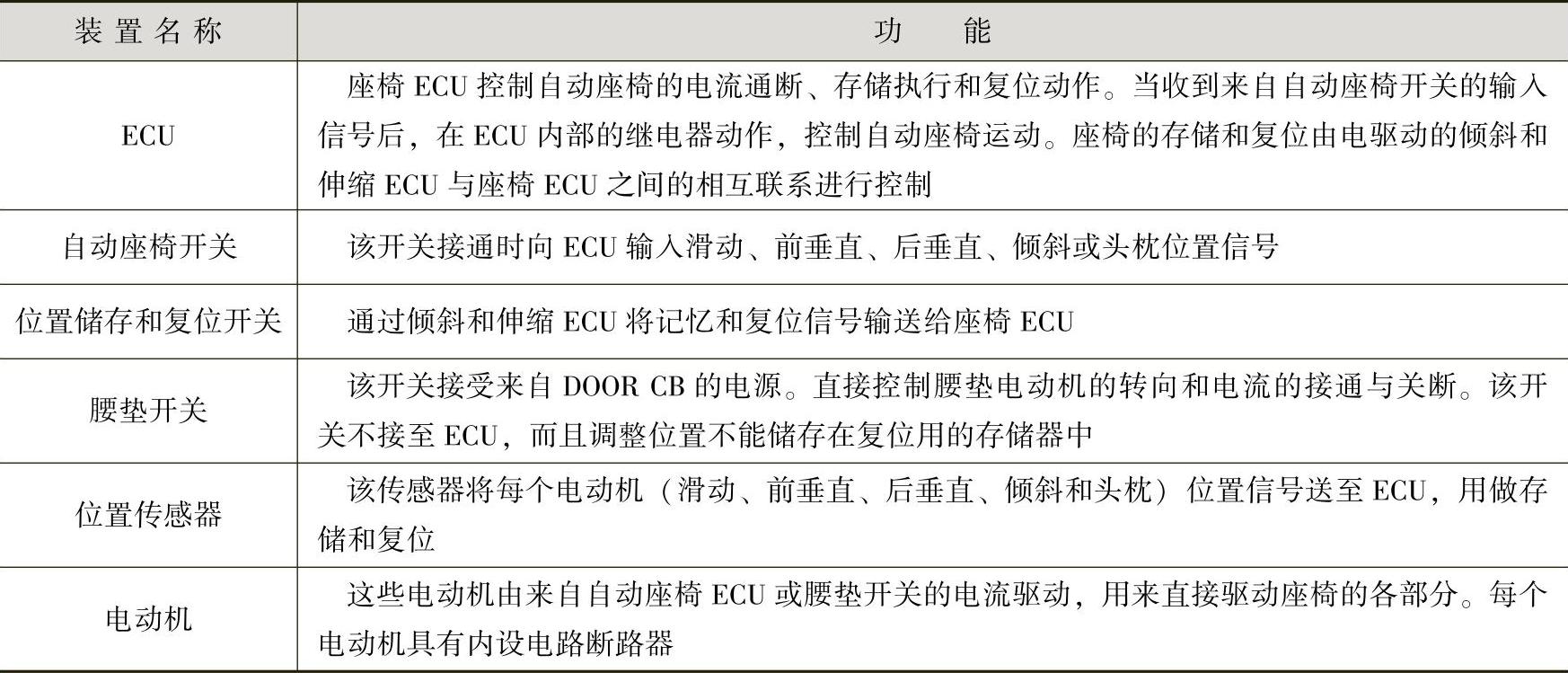
座椅的自动控制电路如图12-5所示。其动作方式有座椅前后滑动调节、座椅前部的上下调节、座椅后部的上下调节、靠背的倾斜调节、头枕的上下调节及腰垫的前后调节等。其中腰垫的前后调节是通过腰垫开关和腰垫电动机直接控制的,并无存储功能。驾驶人通过操纵电动座椅开关可以控制其余的五种调整。当座椅位置调好后,按下储存和复位开关,电控装置就把各位置传感器的信号储存起来,以备下次恢复座椅位置时再用。当下次使用时,只要一按位置储存和复位开关,座位ECU便驱动座椅电动机,将座椅调整到原来位置。控制系统中各装置的功能如表12-1所示。
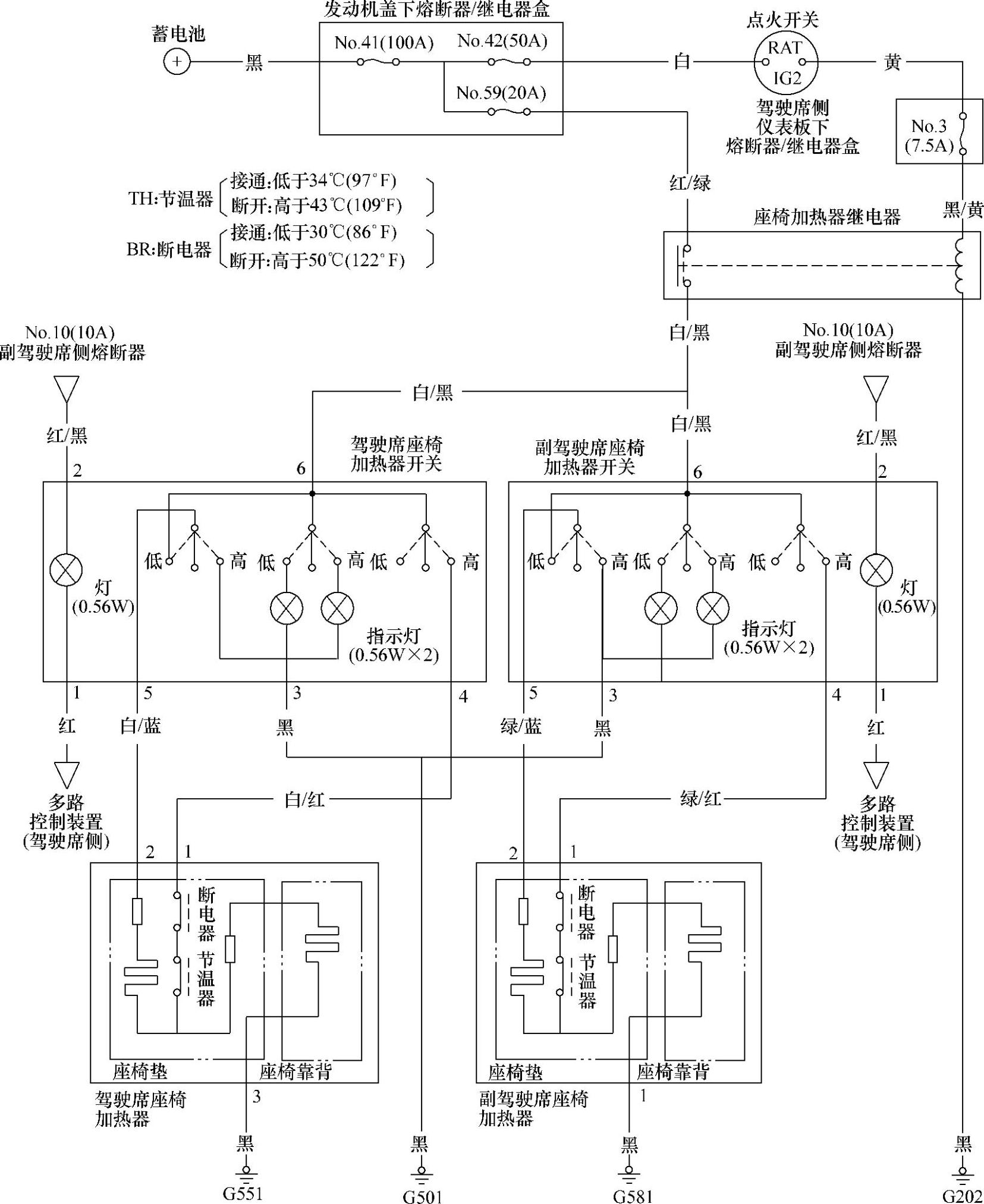
图12-4 座椅加热系统控制电路
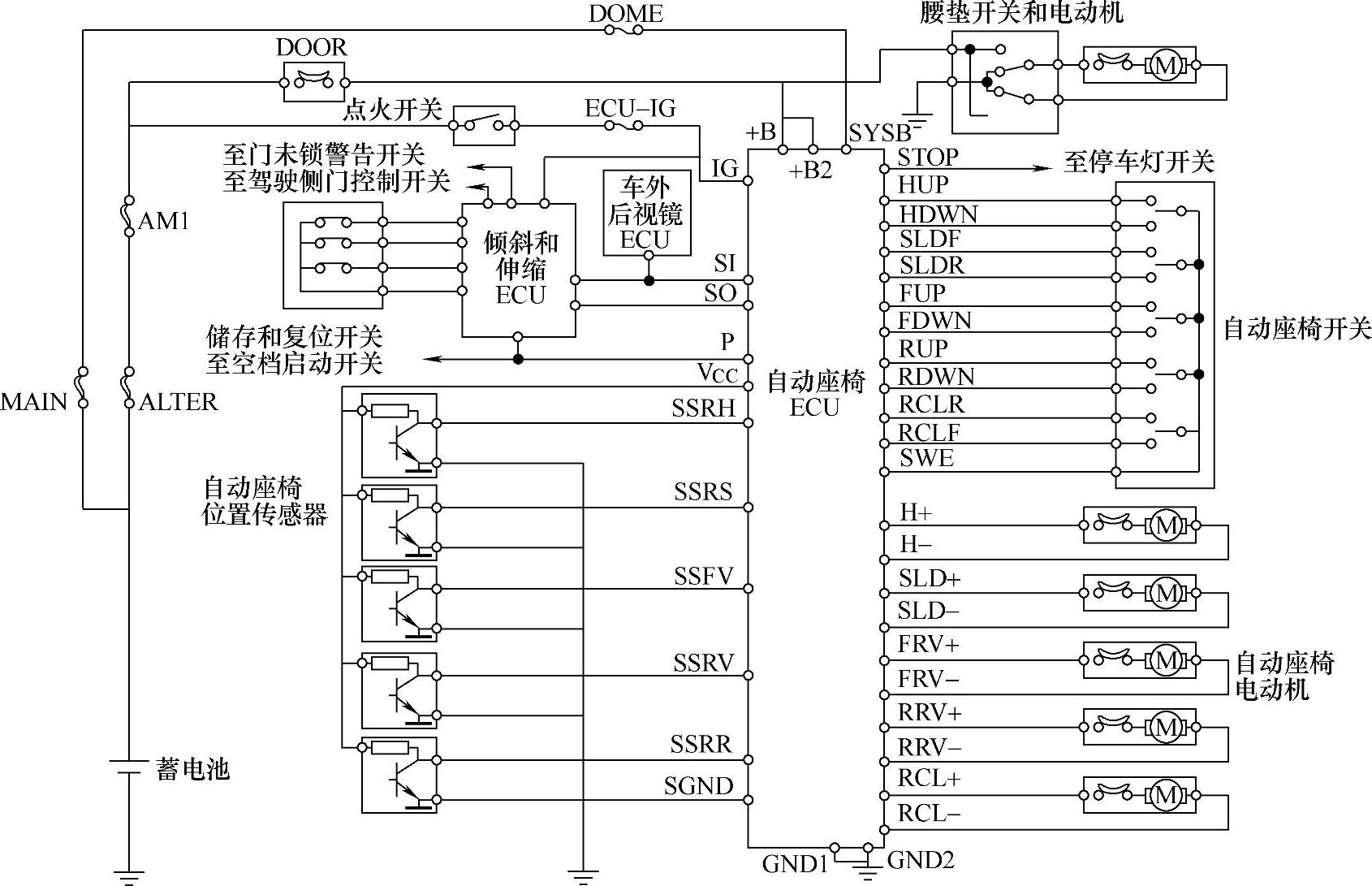
图12-5 自动座椅控制电路图
表12-1 自动座椅控制装置
自动座椅ECU通过A、B、C三个插接器与外部相连,如图12-6所示,每个端子的名称如表12-2所示。

图12-6 自动座椅ECU插接器
表 12-2

图12-7所示为具有八种功能的自动(调节)座椅,图12-8所示为一种多功能自动座椅的调节机构。
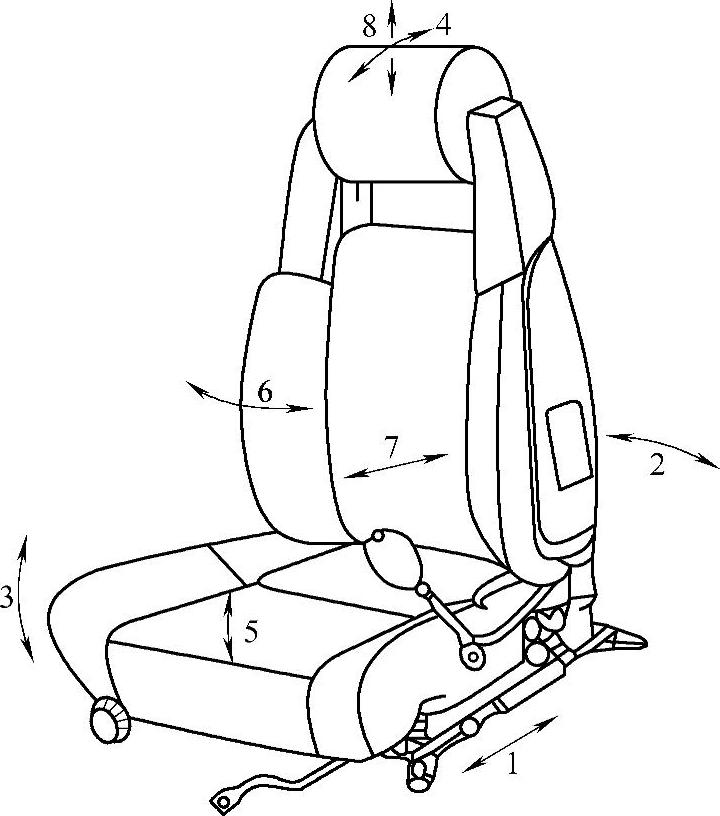
图12-7 八种功能的自动座椅
1—前后调节 2—靠背倾斜调节 3—上下调节 4—头枕前后调节 5—座椅前部调节 6—侧背支撑调节 7—腰椎支撑调节 8—头枕上下调节
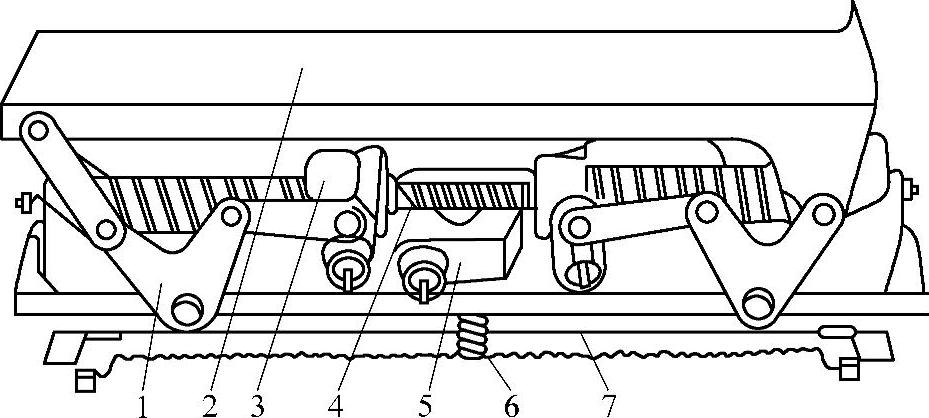
图12-8 多功能自动座椅调节机构
1—连接板 2—固定托架 3—升降啮合螺母 4—升降起重螺母 5—水平移动器 6—驱动器齿轮 7—齿条(https://www.xing528.com)
自动座椅电子控制系统电路原理图如图12-9所示,它由座椅位置传感器、电子控制器ECU和执行机构的驱动电动机三部分组成。传感器包括位置传感器、后视镜位置传感器、安全带扣环传感器以及转向盘倾斜传感器等;ECU包括输入接口、电脑CPU和输出处理电路等;执行机构主要包括执行座椅调整、后视镜调整、安全带扣环以及转向盘倾斜调整等微电动机,而且这些电动机均可灵活地进行正、反转,以执行各种装置的调整功能。另外,该系统还备有手动开关,当手动操作开关时,各驱动电动机电路也可接通,输出转矩而进行各种调整。
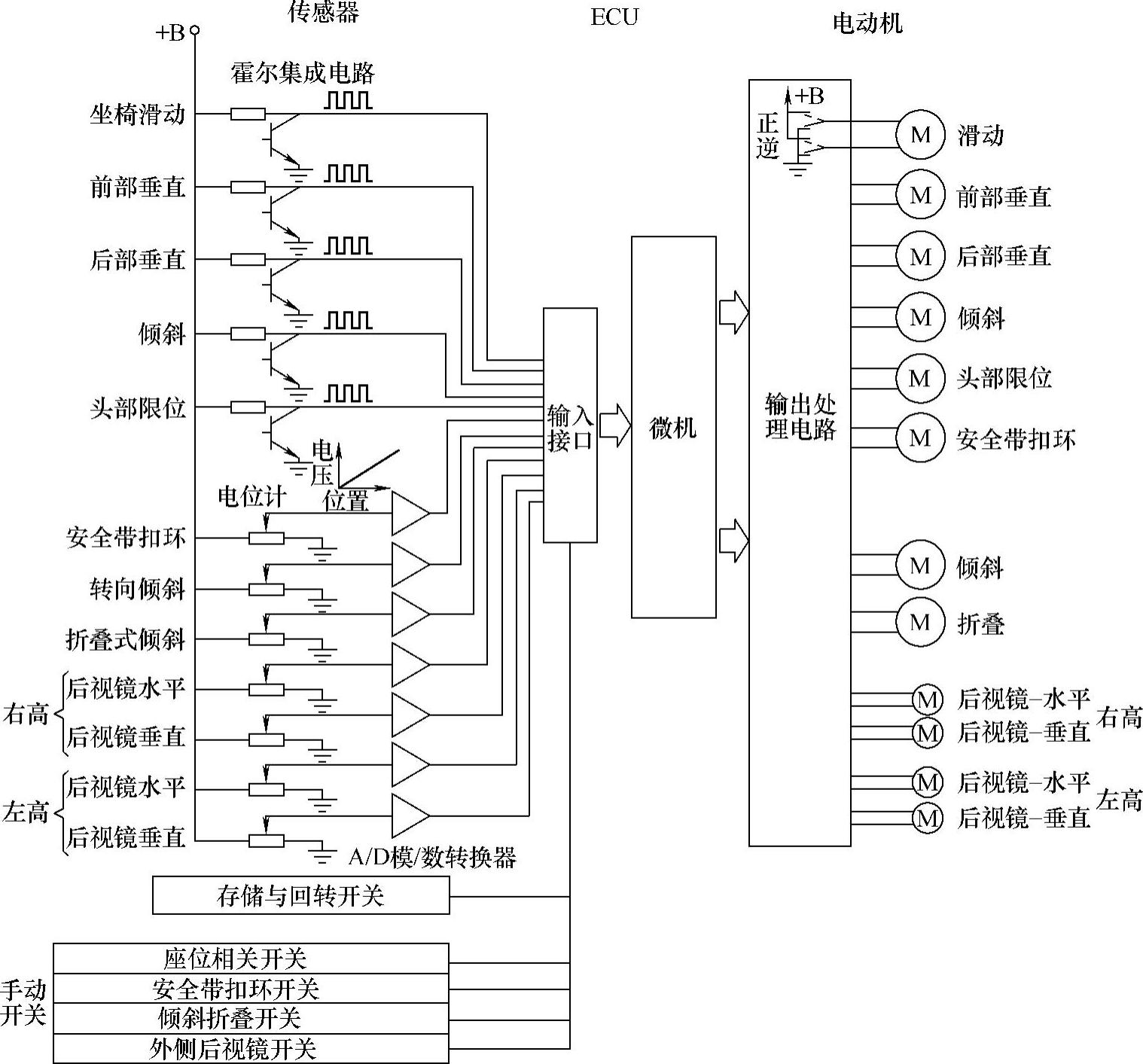
图12-9 自动座椅电子控制系统电路原理图
1.座椅位置传感器
要实现座椅位置的记忆与恢复,则必须有座椅位置传感器。它主要有两种形式,一种是滑动电位器式,如图12-10所示。另一种是霍尔式,如图12-11所示。滑动电位器式位置传感器主要由座椅电动机驱动的齿轮、电阻丝以及在其上滑动的滑块组成。它的工作原理是,当电动机驱动座椅的同时,也驱动齿轮2带动螺杆,驱动滑块1在电阻丝3上滑动,从而将座椅位置信号转变成电压信号输入给ECU。
霍尔式位置传感器主要由永久磁铁、霍尔集成电路等组成。永久磁铁安装在由电动机驱动的转轴上,由于转轴的旋转而引起通过霍尔元件磁通量的变化,从而霍尔元件产生霍尔电压,再经霍尔集成电路进行放大并处理,然后取出旋转的脉冲信号输入ECU。
2.自动座椅位置记忆与复位的工作原理
图12-12所示为自动座椅位置的记忆与复位控制流程图。
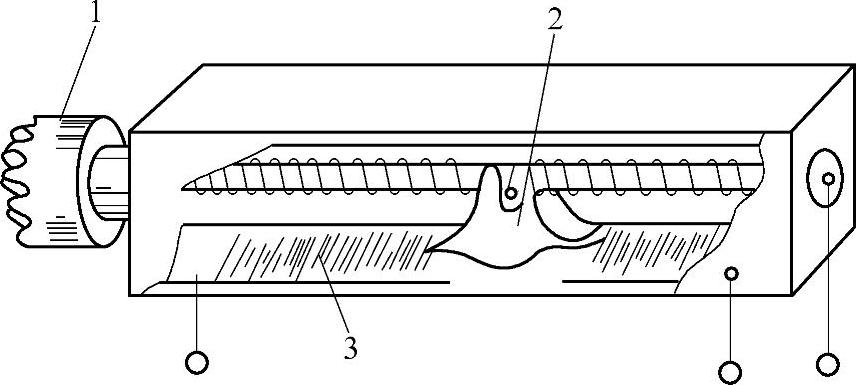
图12-10 滑动电位器式自动座椅位置传感器结构图
1—滑块 2—齿轮(电动机驱动) 3—电阻丝
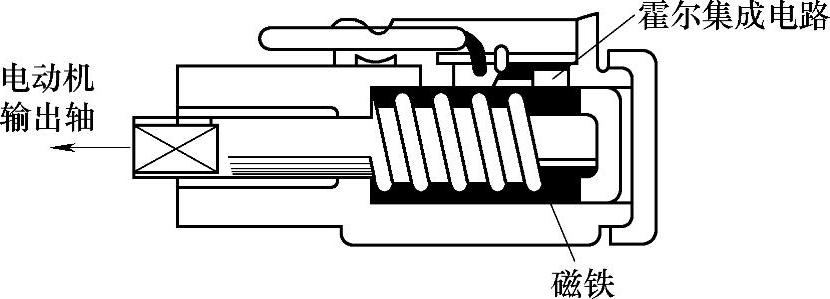
图12-11 霍尔式自动座椅位置传感器结构图
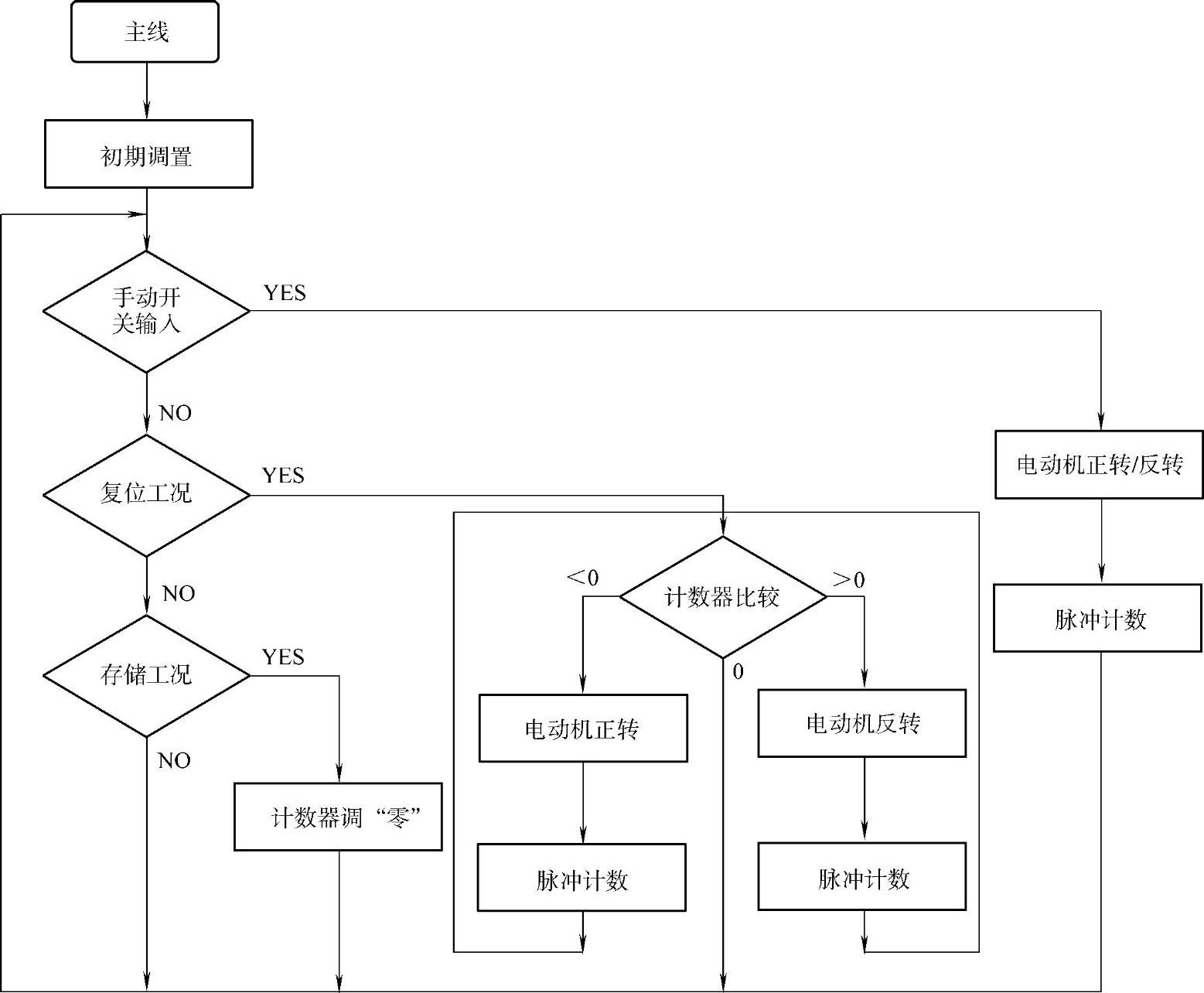
图12-12 自动座椅位置记忆与复位控制流程图
如果座椅滑板的滑动量约为240mm,则位置传感器的霍尔集成电路对应于约0.6mm滑动量时,输出1个脉冲。利用存储与复位开关进行存储操作,若座椅位置调整好后,按下此开关,ECU内存的脉冲计数器便调为零,以此存储座椅状态,并作为座椅和传感器位置信号计数的基准,即座椅位置在此前,脉冲数大于0,在此后,脉冲数小于0。随后若未采用复位功能自动调节,而是从手动开关输入,电动机正转或反转,座椅在此基准位置上向前或向后移动,ECU对位置传感器输出的脉冲进行计数。对于输出脉冲,当给电动机提供正转信号时脉冲加法计数,座椅前移,而反转时脉冲做减法计数,座椅后移。这样,就可以获知当前传感器滑动的位置和调整时座椅的相对位置,但只要不按下存储与复位开关,ECU便将此位置脉冲数进行存储(若按下,调置为零。若下次仍是手动开关输入,ECU便将内存的脉冲数进行加减计数运算,随后存储一个新的脉冲数作为当前内存)。
利用存储器与复位开关进行重复操作时,若ECU内存的脉冲数大于0,则当前位置位于存储位置的前侧,所以电动机反转,座椅向后方移动,这一动作一直持续到ECU计数脉冲数为零时,即一直到达存储位置为止;若ECU内存的脉冲数小于0,则座椅向前侧移动,直到ECU计数脉冲数为零,到达存储位置为止。
位置传感器采用电位计方式时,输出模拟电压,利用模/数转换器,进行数据变换处理。利用电位计可以检测实际移动的位置,所以,该计数器的比较电路与前述不同,但其控制流程相同。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。