



传统巡航控制系统电控单元有两个输入信号,当测出的实际车速高于或低于驾驶人调定的车速时,电控单元将这两种信号进行比较,得出两种信号之差,即误差信号,再经放大、处理后成为节气门控制信号,送至节气门执行器,驱动节气门执行器动作,调节发动机节气门开度,以修正两输入车速信号的误差,从而使实际车速很快恢复到驾驶人设定的车速,并保持恒定。而智能巡航控制则增加与前车车距控制装置,如图14-10所示。
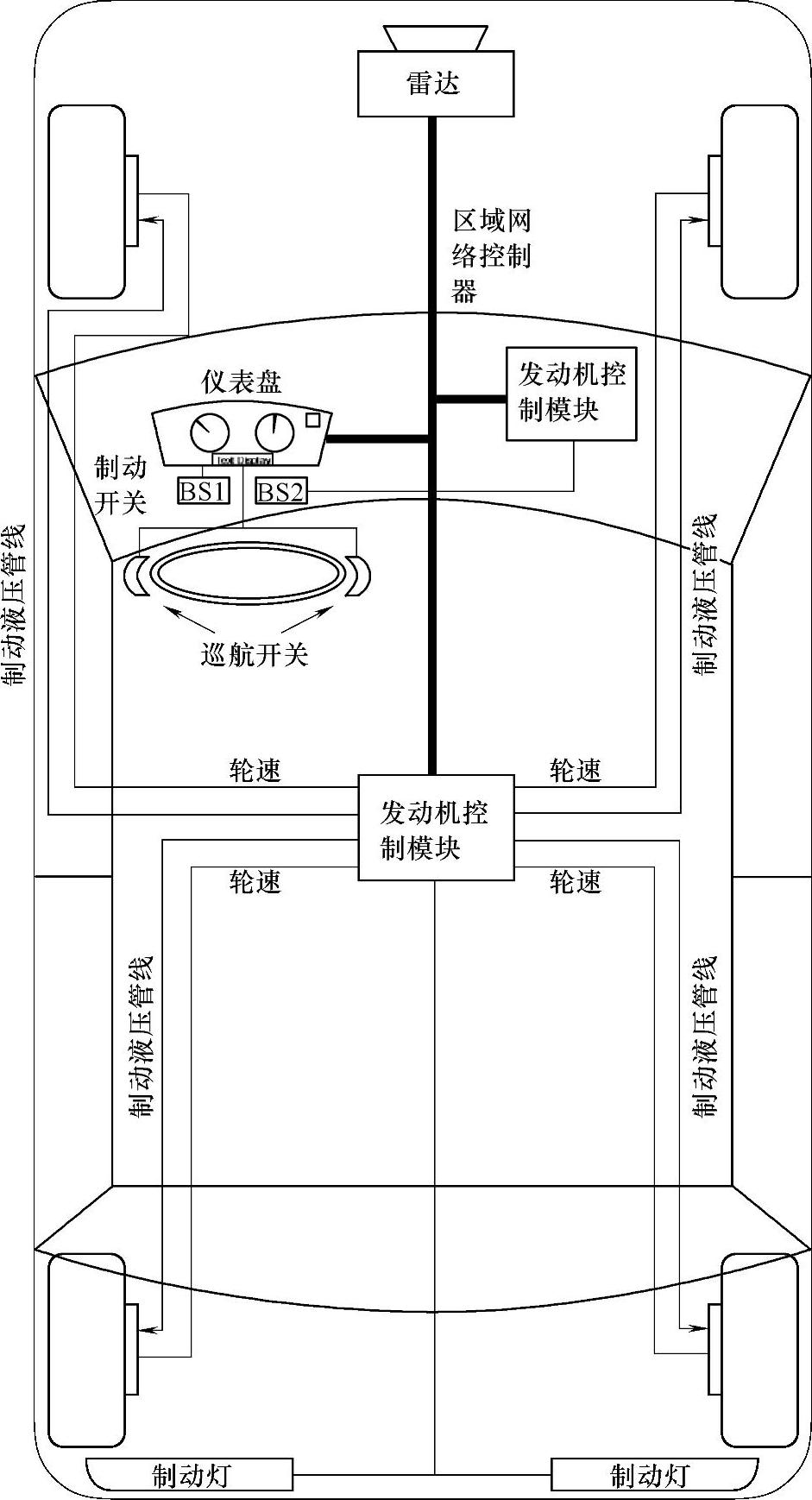
如图14-11所示,为ACC系统的组成和互联主件系统。不同模块之间通过一个串行通信网络左右通信的方法,俗称控制器区域网络(CAN)。
ACC模块:ACC模块的主要功能是处理雷达信息并判断附近是否存在前方车辆。当ACC系统处于“时间间隙控制状态”时,它会发出信息到发动机控制和制动器控制模块,以控制ACC车辆和目标车辆之间的时间间隙。
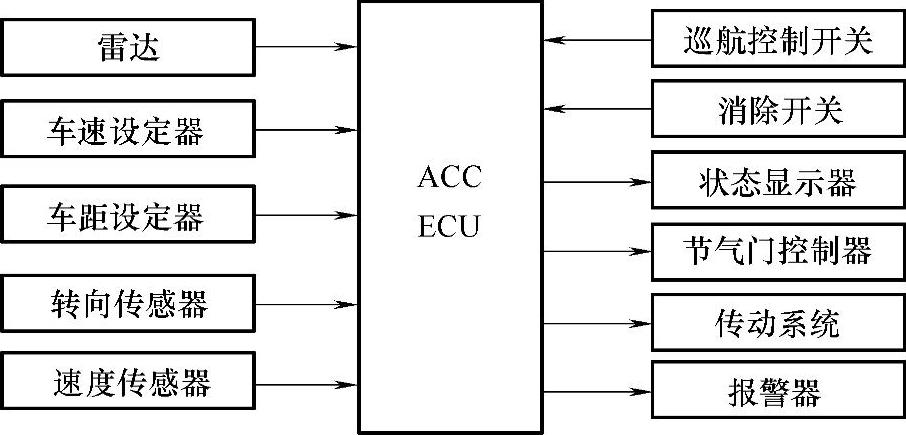
图14-10 智能巡航控制系统的示意图
发动机控制模块:发动机控制模块的主要功能是接受来自ACC模块和仪表板的信息并根据这些信息调整车速。发动机控制模块通过控制发动机节气门控制车速。
制动控制模块:制动控制模块的主要功能是在ACC控制模块的要求下通过对每个轮胎进行制动从而降低车速。制动系统采用电子增强的液压式,如ABS制动系统。
仪表群:仪表群的主要功能是处理巡航开关和将它们的信息发送至ACC系统和发动机控制模块。同时,仪表群也将显示出信息,以便于驾驶人了解ACC系统的运行状态。
CAN:控制器局域网(CAN)是一个机动车网络标准,它使用2线总线来传递和接收数据。网络上的每个节点都具备每个消息帧发送0~8个字节数据的能力。一个消息帧由一个0~8字节的前端消息和一个校验消息组成。前端消息是一个独特的标识符,用于确定优先级。在总线空闲时网络上的每个节点都可以发送数据。若有多个节点在同一时间发送数据,将会有一个仲裁机制来确定哪个节点来控制总线。具有最高优先级的消息将赢得仲裁,其信息将被传送。一旦检测到总线空闲,发送失败的消息将重试发送。
巡航开关:巡航开关是装在转向盘上的几个按钮,以便于驾驶人命令和操作ACC系统。
开关包括:
“ON”:将系统置于“ACC待机状态”。
“OFF”:取消ACC操作并将系统置于“ACC关闭状态”。
“SET+”:起动ACC并设置设定速度或加速。
“COAST”:减速。
“RESUME”:恢复到设定速度。
“TIME GAP+”:增加时间间隙。
“TIME GAP-”:减小时间间隙。
制动开关:一共有2个制动开关,分别为制动开关1(BS1)和制动开关2(BS2)。当其中任何一个开关被激活时,巡航控制操作取消,系统进入“ACC待机状态”。
制动灯:当制动控制模块响应ACC要求进行制动时,将会打开制动灯提醒后方车辆注意本车正在减速。
ACC传感器:大众车系智能巡航控制系统雷达测距传感器如图14-12所示。传感器发射频率:76.5GHz,可探测范围:150m,水平视角:12°,垂直视角:±4°,车速探测范围:30~210km/h。
ACC系统操作界面和传统巡航控制类似。驾驶人通过转向盘上的开关操作系统。除了用于控制ACC车辆和目标车辆间的时间间隙的两个开关以外,ACC和传统巡航控制系统的开关相同。此外,还有一系列的信息将会显示在仪表板上以告诉驾驶人ACC系统所处的状态并提供必要的警示。使用ACC系统时,首先按下“NO”键,将ACC系统置于“ACC待机状态”。然后按下“SET”键进入“ACC起动状态”。此时,ACC系统将根据交通环境控制车辆达到设定速度。
 (https://www.xing528.com)
(https://www.xing528.com)
图14-11 智能巡航控制的基本结构图

图14-12 大众车系雷达测距传感器安装及结构
ACC不同系统间的信息和信号流如图14-13所示。
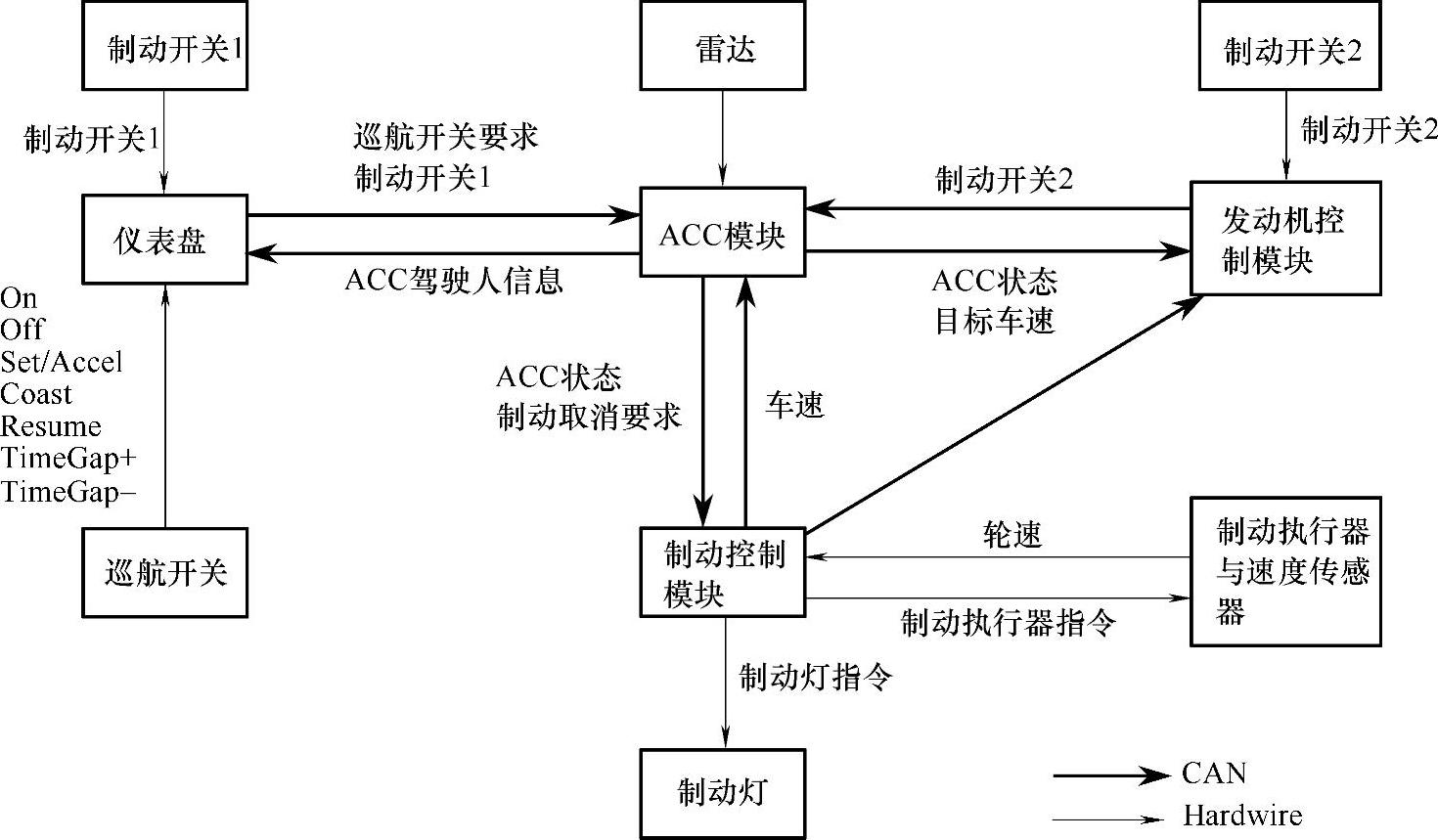
图14-13 ACC控制流程
当点火开关处于关闭位置时,任何系统都将不受外力干扰。当开关置于打开位置时,ACC系统将初始状态设为“ACC关闭状态”。
进入“ACC待机状态”:在巡航控制启用之前驾驶人需要首先将状态置于“ACC待机状态”。
此过程由驾驶人按下“NO”键来完成,若无系统故障,ACC系统将过渡到“ACC启用状态”。
进入“ACC启用状态”:驾驶人通过按下“SET”或“RESUME”按钮进入“ACC启用状态”。若内存中存在事先设定的速度,当按下“RESUME”时,系统将把此速度设为目标车速。否则,当按下“SET”按钮时,系统将以当前速度为目标车速。下列条件将作为响应“ACC启动”开关的必要条件:
①制动开关1:制动系统未启用
②制动开关2:制动系统未启用
③车速≥40km/h
处于ACC启用控制时,车速要么保持设定速度,要么与前方车辆保持一个时间间隙,以速度较低者为准。
此模式下的操作相当于常规的速度控制。若无处于系统时间间隙或间隙之内的前方车辆,该车辆将保持目标车速。发动机控制系统通过节气门控制发动机输出功率以保证将车速维持在目标车速。
ACC系统进入跟车模式或“ACC时间间隙控制状态”,若雷达侦测到有前方车辆进入间隙距离之内,在此模式的操作下,ACC系统将发送一个目标速度给发动机控制模块并向制动控制模块下达减速指令,以保证车辆间设定的时间间隙。
减速控制:ACC系统通过对发动机控制模块发送降低目标速度指令和对制动控制模块发送制动减速指令的方式来降低车速。其最大制动减速度不大于0.2g。制动减速时,制动控制模块起动制动灯。
加速控制:ACC系统通过提高发送到发动机控制模块的目标速度来提高车速。发动机控制模块将努力保持目标车速,其最大加速度可高于0.2g。
调整时间间隙:驾驶人可以通过“TIME GAP+”和“TIME GAP-”的开关调整时间间隙。按“TIME GAP+”开关,时间间隙值增加,两车之间的间隙也随之增加。按“TIME GAP-”的开关,时间间隙值降低,因此两车之间的间隙也随之减少。
对于移动缓慢或停滞车辆的反应:在这样的情况下,ACC系统不能够在该系统的减速机构中以最大0.2g的减速度维持时间间隙。ACC车辆和前方车辆之间的间隙迅速减少或达到最低车速(40km/h)。在这种情况下,ACC系统进入“ACC待机状态”,而且通过显示一个“驾驶人干预需求”的仪表盘上的文本信息和一个有声钟鸣的驱动程序来提醒驾驶人。若制动正由ACC系统利用,则会缓慢解除。在此情形下,驾驶人必须对车辆进行控制。
ACC系统可在速度控制模式和时间间隙(跟车)模式间自动转换,此运作模式取决于相对设定速度更慢的目标速度,以维持ACC车辆和前方车辆之间的间隙。总的来说,如果没有车辆处于间隙距离内,该系统处于速度控制模式,否则,它将维持时间间隙模式。
巡航控制可有操作者或自动通过ACC系统进行取消。以下任一条件将取消ACC:踩下制动踏板;按下“关闭”按钮;车辆行驶速度低于40km/h;检测到ACC系统故障。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。