



当某个控制系统加入典型输入信号后,分析其输出响应特性的动态性能和稳态性能,如果满足稳定过程对控制系统的性能要求,就称该系统为稳定系统。时域分析法是通过直接求解系统在典型输入信号作用下的时间响应,来分析控制系统的稳定和控制系统的动态性能及稳态性能。工程上常用单位阶跃响应的超调量、调节时间和稳态误差等性能指标评价系统的优劣。控制系统经过参数整定和调试,其动态特征往往近似于一阶或二阶系统,因此一阶、二阶系统的理论分析结果,是高阶系统分析的基础。一阶系统的动态特性应用一阶微分方程描述。一阶系统只有一个系统参数,即时间常数T,它反映了一阶系统的惯性大小或阻尼程度。一阶系统的性能由其时间常数T唯一决定,时间常数T也可由实验曲线求出。
系统的性能分析,在控制理论中有着重要的地位。二阶系统含有两个系统参数,即阻尼比ξ和无阻尼振荡频率ωn。阻尼比ξ决定着二阶系统的响应模态。ξ=0时,系统的响应为无阻尼响应;ξ=1时,系统的响应为临界阻尼响应;ξ>1时,系统的响应为过阻尼响应;0<ξ<1时,系统的响应为欠阻尼响应。欠阻尼工作状态下,合理选择阻尼比ξ的取值,可使系统具有令人满意的动态性能指标。动态性能指标有tr、tp、ts等,可以从响应曲线上读取;另外它们与ξ、ωn有相应的关系,只要已知ξ、ωn,就能求出动态性能指标,如图1-1所示。
1.动态性能指标
①最大超调量σp。
②上升时间tr。
③峰值时间tp。
④调整时间ts。
2.稳态性能指标
稳态误差ess输出响应的稳态值与希望的给定值之间的偏差,是衡量系统准确性的重要指标。
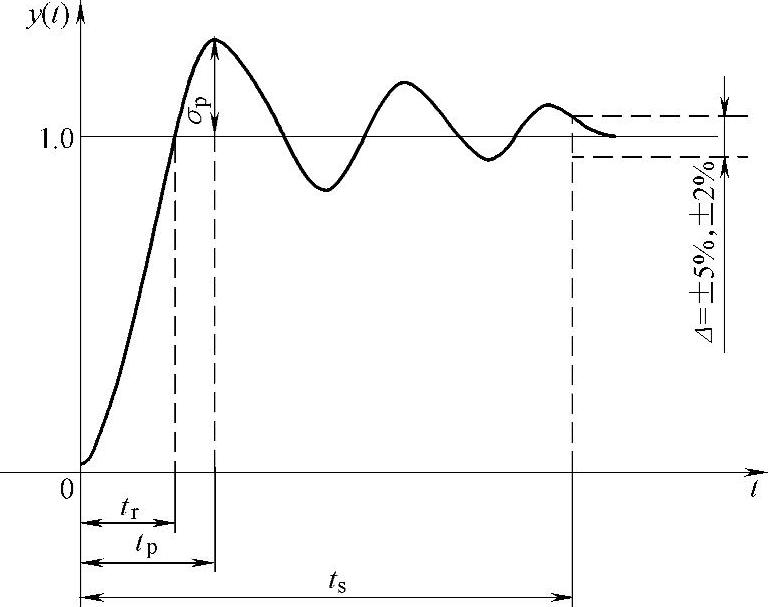
图1-1 系统动态指标
1)稳定分析。控制系统是否稳定,是决定其能否正常工作的前提条件。不稳定系统在工程上多数无应用价值。稳定是指系统受到扰动偏离原来的平衡状态后,去掉扰动,系统仍能恢复到原工作状态的能力。应当特别注意,系统的稳定只取决于系统内部的系统及参数,而与初始条件和外作用的大小及形式无关。线性系统稳定的充分必要条件:系统的所有闭环特征根都具有负的实部,或闭环特征根都分布在左半s平面。判别系统的稳定,最直接的方法是求出系统的全部闭环特征根。但是求解高阶特征方程的根是非常困难的。工程上,一般均采用间接方法判别系统的稳定。劳斯判据是常用的一种间接判别系统稳定的代数稳定判据,可用来确定工作时,系统参数的允许变化范围。系统闭环特征多项式各项同号且不缺项,是系统稳定的必要条件。
2)稳态误差。稳态误差是系统很重要的性能指标,它标志着系统最终可能达到的控制精度。稳态误差定义为稳定系统误差信号的终值。稳态误差既和系统的参数有关,也取决于外作用的形式及大小。稳态误差可应用拉氏变换的终值定理计算,步骤如下:
①判别系统的稳定。只有对稳定的系统计算其稳态误差才有意义。
②根据误差的定义求出系统误差的传递函数。
③分别求出系统对给定和对扰动的误差函数。
④用拉氏变换的终值定理计算系统的稳态误差。
要注意,终值定理的使用条件为,误差的相函数在右半s平面及虚轴上(原点除外)解析。系统稳定是满足终值定理使用条件的前提。如果误差函数在右半s平面及虚轴上不解析,只能应用定义计算稳态误差。对三种典型函数(阶跃、斜波、抛物线)及其组合外作用,也可利用静态误差系数和系统的型数计算稳态误差。采用具有对给定或(和)对扰动补偿的复合控制方案,理论上可以完全消除系统对给定或(和)扰动的误差,实现输出对给定的准确复现。但工程上常根据输入信号的形式实现给定无稳态误差的近似补偿。
二阶系统的闭环传递函数:

式中 T——受控对象的时间常数;
K——受控对象的增益。(https://www.xing528.com)
其典型系统图如图1-2所示。
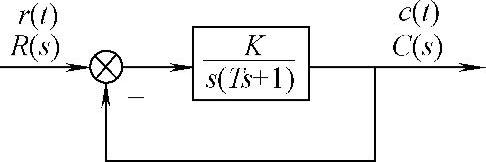
图1-2 二阶系统传递函数
式(1-1)可改写成标准形式:

式中 ωn——无阻尼自然振荡频率, ;
;
ξ——阻尼比, 。
。
二阶系统动态性能指标的计算(0<ξ<1的欠阻尼情况):
上升时间:

式中  ,
, 。
。
峰值时间:

超调量:

调整时间:
衰减指数m和衰减率ψ:

高阶系统的动态响应,在工程中常采用主导极点的概念进行简化分析。闭环主导极点的基本概念:如果高阶系统中距离虚轴最近的一对共轭复数极点(或一个实极点)的实部绝对值仅为其他极点的1/5或更小,则系统的响应主要由这一对复数极点确定,称之为闭环主导极点。找到了主导极点,高阶系统就可以近似作为二阶或一阶系统来分析。控制系统受扰动偏离了平衡状态,当扰动消除后系统能自动恢复到原来的平衡状态,或能稳定在一个新的平衡状态,则称系统是稳定的,反之,称系统是不稳定的。系统的稳定是属于系统本身的特性,它只与自身的系统与参数有关,而与初始条件、外界扰动的大小等无关。系统的稳定取决于系统的特征根(极点),而与系统零点无关。一个稳定的系统在给定输入或扰动输入的作用下,经历过渡过程进入稳态后的误差,即 。系统的稳态误差是对系统控制的准确性的度量,是系统的稳态性能指标。
。系统的稳态误差是对系统控制的准确性的度量,是系统的稳态性能指标。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。