



稳定控制技术以控制算法为主线,近30年来提出的典型算法有经典、瞬时、极点配置、界限状态、预测、自适应、非线性、随机和模糊控制等。主动控制技术引人注目的进展是集传感器、控制器、执行器与系统为一体,以稳定控制和降噪为目标的智能系统的出现。当前热点是基于压电传感器和执行器的智能系统,控制策略为自适应控制、神经网络控制、非线性控制和混合控制等控制理论的新成果。基于逆传递函数的神经网络的控制方法能够从训练中建立复杂的非线性关系,并将其存储在连接权中;若用模糊规则改善神经控制器,并用来预测未来的反应,则减少了需要测量的量,改善了控制效果。
主动控制效果虽优于被动控制,但需要外界输入能量,装置复杂、造价高、可靠性不高,还需要经常维护,加上系统和算法繁难,对于车辆系统的应用存在困难。例如,达到底盘主动控制所需推力的制动器价格贵、能耗大,因此多采用半主动控制,其结构和传递函数模型,如图1-10所示。通过局部主动调节系统动力特性实现控制,能耗低,效果明显。
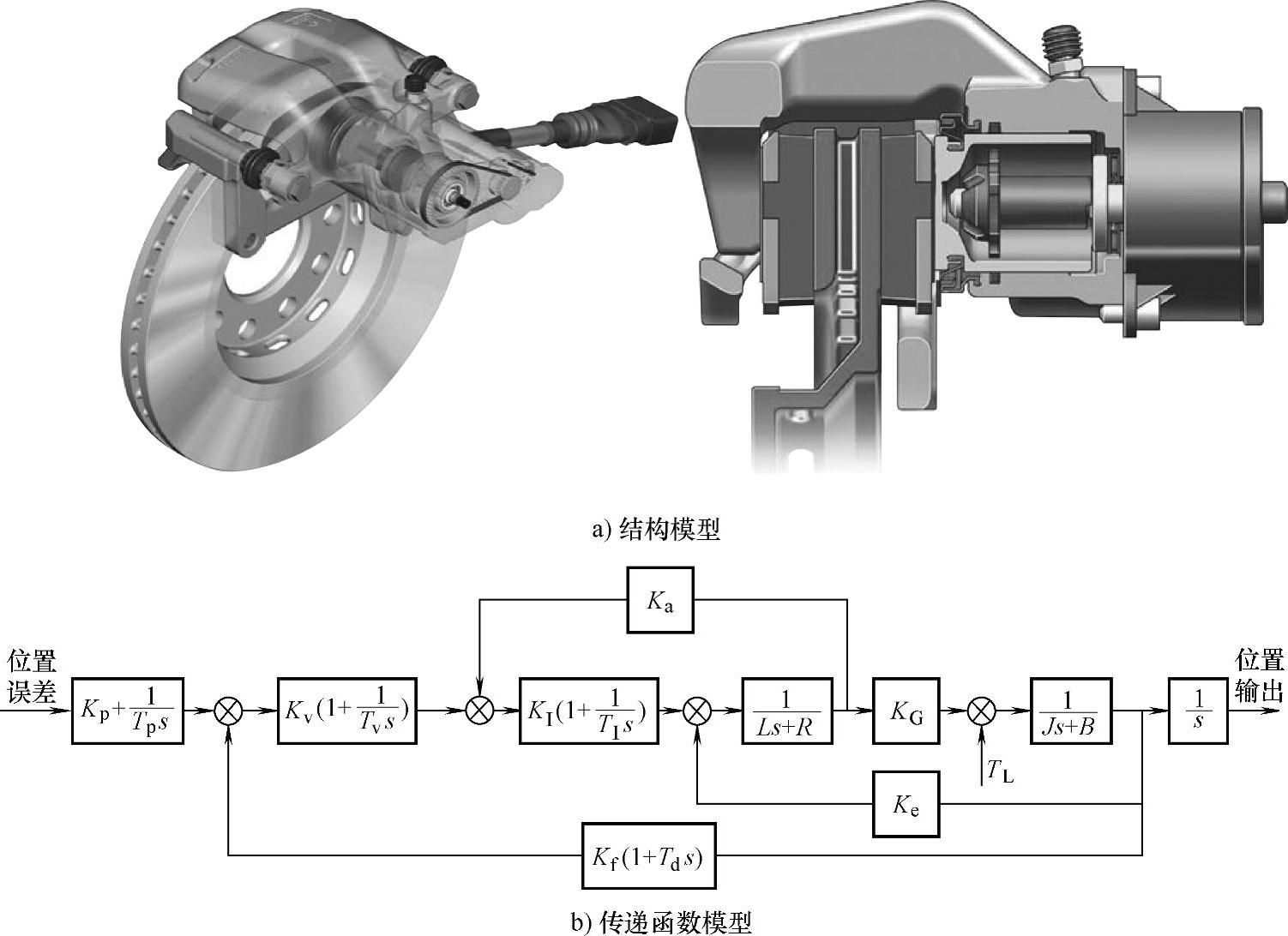
图1-10 半主动控制制动器模型
图1-10所示中阻力矩TL和负载转动惯量J2分别由式(1-11)、式(1-12)计算:

式中 F——制动力(N);
η——制动系统效率;
L——位移量(m);
Tf——电动机摩擦转矩(N·m);
J2——制动惯量(N·m·s2);
W——电动机质量(kg)。
所需数据参数见表1-1、表1-2。
表1-1 电动机和负载参数表

表中 L——电枢电路电感(H);
R——电枢电路电阻(Ω);
Ke——电枢反电势系数(V·s/rad);
KG——力矩系数(N·m/A);
J1——电动机转子转动惯量(N·m·s2);
J2——负载转动惯量(N·m·s2);
B1——电动机转子粘性阻尼系数(N·m·s/rad);
B2——负载的粘性阻尼系数(N·m·s/rad);
TL—阻力矩(N·m)。
表1-2 电流环、速度环和位置环参数表

表中 Ka——电流环负反馈系数(V/A);(https://www.xing528.com)
KI——电流调节器比例放大系数;
TI——电流调节器时间常数(s);
Kf——速度环负反馈系数(V·s/rad);
Td——速度微分负反馈时间常数(s);
Kv——速度调节器比例放大系数;
Tv——速度调节器时间常数(s);
Kp——位置调节器比例放大系数;
Tp——位置调节器时间常数(s)。
由图1-10可知,在电流环中存在反电动势的交叉反馈作用,它代表速度环输出量对电流环的影响。在分析电流环时,要考虑它的影响自然是比较困难的。但由于实际系统中的电磁时间常数远小于机电时间常数,因而电动机中电枢电流的调节过程往往比速度的变化过程快得多,也就是说,比反电动势Ue的变化快得多,反电动势对电流来说只是一个变化缓慢的扰动作用。在电流调节器的调节过程中可以近似地认为Ue基本不变,即ΔUe≈0。这样,简化电流环时,可以不考虑反电动势变化的动态作用,而将电动势反馈作用断开。图1-10所示的电流环和速度环动态性能指标见表1-3。
表1-3 电流环和速度环动态性能指标

由表1-3可知,电流环阶跃时域响应曲线略有超调,速度环阶跃时域响应曲线超调量稍大,但系统曲线迅速上升,峰值时间都非常短,电流和速度都立即下降至恒定值,这样的阶跃响应是很理想的。为方便分析比较,选择库仑粘性摩擦的形式作为摩擦模型,确定决策变量及约束条件建立优化模型,即确定目标函数的类型及数学描述形式。为获取满意的过渡过程的动态特性,采用误差绝对值时间积分性能指标作为参数选择的最小目标函数。为了防止控制量过大,在目标函数中加入控制输入的平方项。选用下式作为参数选取的最优指标:

式中 e(t)——系统误差;
w1——系统误差绝对值权值;
w2——输入平方项的权值;
u(t)——系统输入指令。
为了避免超调,采用了惩罚功能,即一旦产生超调,将超调量作为最优指标的一项,此时最优指标为

式中 w3——系统超调量的权值,且w3远大于w1。
确定表示可行解的染色体编码解码方法,即确定出个体的基因型及搜索空间等。采用实数编码方式。这种方式使个体的每个基因值用某一范围内的一个实数来表示,个体的编码长度等于其决策变量的个数。确定个体适应度的量化评价方法,即确定出由目标函数值J到个体适应度F(Xi)的转换规则,在参数辨识中,适应度函数选择为

式中 m——种群大小;
Xi——个体,i=1,2,…,m;
F(Xi)——个体适应度。
半主动控制方法有变刚度和变阻尼两种,车辆可通过实时调节系统中某些零部件的刚度和质量来改变系统固有频率以避免共振。形状记忆合金、电流变和磁流变等智能材料的出现为主动调节系统刚度、阻尼提供了新途径,电流变液和磁流变液都是可控流体,在电场或强磁场作用下,可从流体变为剪切屈服应力较高的粘塑性体,这种改变具有连续、可逆、迅速和易于控制的特点,适于耗能器,以实现半主动控制。基于电流变和磁流变可控阻尼器的车辆悬架半主动控制技术,可对复杂非线性及滞后系统进行混合控制,包括被动/主动混合、被动/半主动混合、主动/半主动混合。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。