



稳定控制算法是实现控制功能的根本。伴随着现代控制理论的进步及车辆安全性要求的提高,算法成果目前非常丰富。控制算法主要有两个侧重点:一是采用不同控制方式来实现稳定控制功能;二是完善稳定控制中的各种功能实现算法。基于稳定控制技术的底盘功能之间的关系如图1-12所示。控制方法包括PID、滑模变系统、最优、模糊、神经网络等方法,大多以滑移率为目标,实际控制中滑移率是估算值,由于车辆模型的非线性及参数不确定性,该法存在稳健性问题,无法实用化。逻辑门限值控制方法不涉及数学模型,对于非线性比较有效,具有简单、计算量小、便于实现的优点,因此该法应用广泛;完善功能算法,包括前后稳定控制力分配、车速估算、路面附着估算、特殊工况、故障检测等算法,由于成本要求,需增加辅助装置的算法难以实用,而实用化算法需进行估算精度和稳健性方面的完善。稳控系统算法框架如图1-12所示。
稳控系统模块化关键技术为软件标定,如图1-13所示。通过道路确定控制参数的实验方法,由于滑移率是主要参数,需要一些附加设备,即使得到准确测量结果,在应用时也存在问题,原因是滑移率是以估算的车速为基准计算的,车速误差导致滑移率计算误差较大,因而滑移率只能作为辅助参数。因此,结合减速度与滑移率参数的稳定控制正交实验设计方法在软件标定中比较实用,但一般的正交设计在参数稳健性分析方面不够全面,有待改进。由于稳定控制软件标定的专业化较强,供应商都会利用工具软件来辅助标定工作,国外公司均有通用标定软件,如ETAS公司的INCA,Vector公司的CANape,dSPACE公司的CalDesk等。这些软件的优势是比较全面,但也存在问题,包括接口文件修改定义复杂,
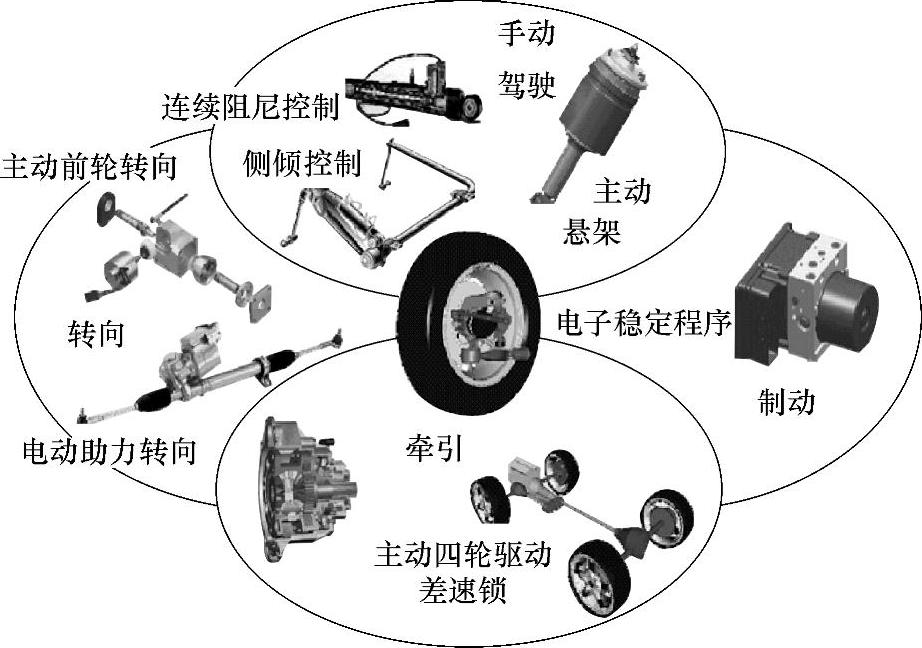
图1-12 车辆稳控系统算法框架
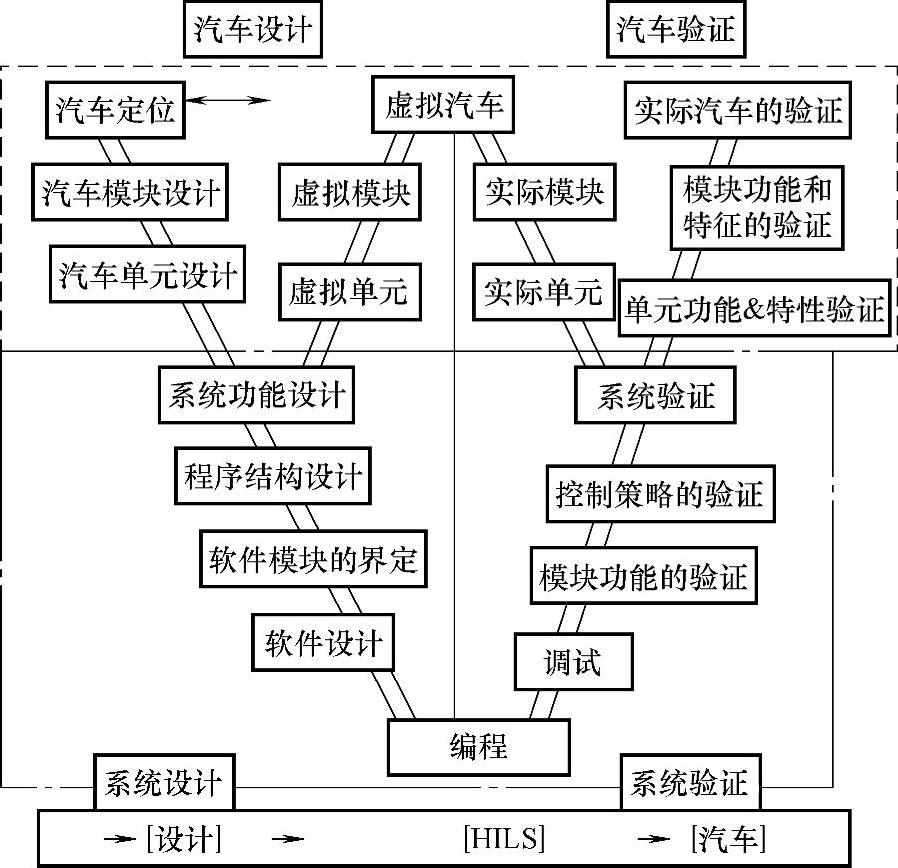
图1-13 稳控系统模块化关键技术
系统二次开发不便,另外,标定软件要整合专用接口才能工作,使得系统购置成本很高。因此,研发适用于稳控系统标定软件非常重要。稳控系统标定内容逻辑关系如图1-14所示。(https://www.xing528.com)
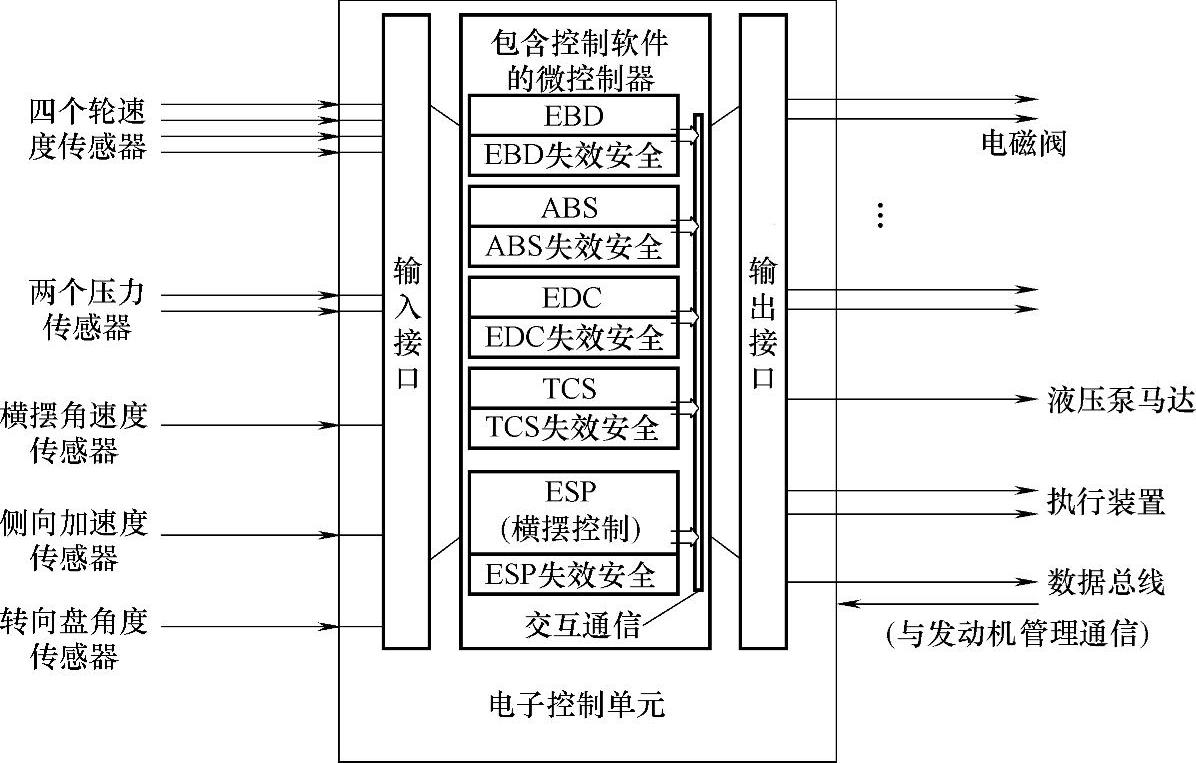
图1-14 标定内容逻辑关系
车辆稳定控制技术属于车辆、机电、控制及信息交叉科学领域。稳控系统是机电磁液耦合的产品,包括稳定控制理论、ECU软硬件的开发、液压控制单元(Hydraulic Control Unit,简称HCU)的设计开发、稳控系统与整车匹配方法、测试装置、工艺研发、生产线和产业化等技术。ECU软硬件采用双CPU的构架,如图1-15所示,具备高精度、高抗干扰性的轮速信号处理模块和完善的故障诊断功能,系统稳定可靠、适应性强。基于正交设计的稳定控制匹配实验方法提高了产品与整车的匹配效率,提升了电磁阀、回油泵等高精度复杂零部件的可靠性和一致性。
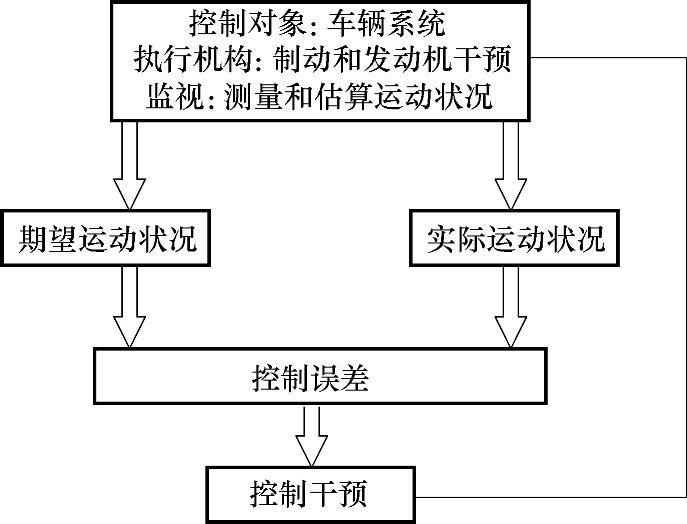
图1-15 稳控系统的基本构架
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。