



在车辆应急控制时,稳控系统控制管路压力,使车轮与路面处于最佳附着状态,可显著地提高车辆的稳定性,减少轮胎磨损,是保护自身安全,又避免伤害他人的主动安全装置。稳控系统包括控制方法、HCU软硬件研发、ECU、基于正交设计的匹配实验方法、工艺攻关与产业化。采用遗传算法对控制原理进行分析,并用控制极大值原理导出控制律,设计反馈控制的实时控制方法。目前产品采用逻辑门限控制方法,该法具有简单,计算量小,便于实现的优点,能较好地实现控制,它的基本原理是利用路面和轮胎之间的纵向附着系数与滑移率之间的关系。然而,由于车身速度的测量存在困难,无法直接得到车轮的滑移率,只得用半经验方法来估计滑移率,路面附着特性的估计算法也必须通过不同路面上的道路实验来确定,导致需要大量实验来匹配参数。一些控制方法,如PID自适应调节,滑移变系统控制等,试图解决门限值方法的问题,但计算量过大,需要测量系统状态量及高价导数,由于成本和可实现性等原因,难以应用。以几种路面为例,如干沥青、潮湿泥土、疏松积雪和结冰路面,轮胎在对应路面上的纵向附着系数与滑移率的关系如图1-16所示。
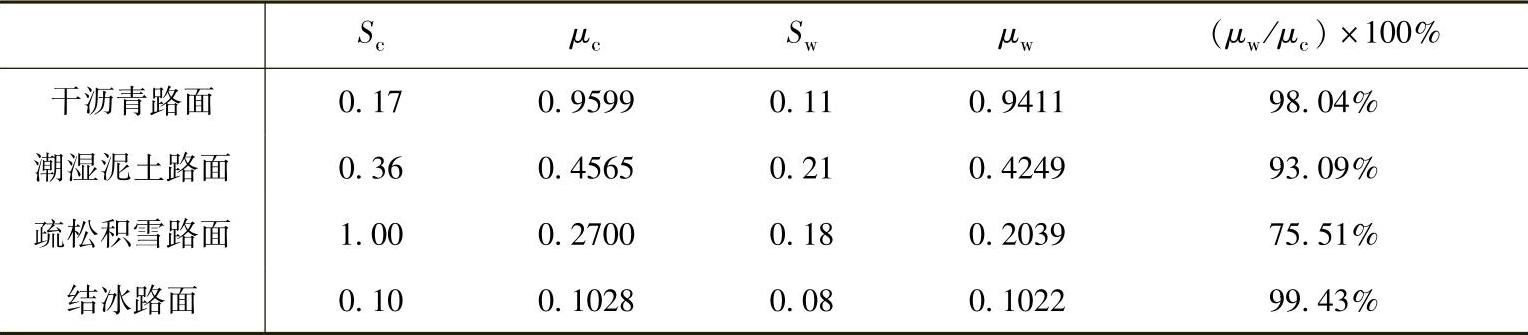
设车速v相同,均为20m/s,而车轮的滑移率S不同,则对应的地面稳定控制力矩也不同。若忽略车轮惯性力,则稳定控制力矩p≅mgμR,耗散功率(pω)=pv(1-S)/R。设1/4整车质量m=342kg,车轮转动惯量I=1.0kg·m2,车轮半径R=0.33m,g=9.8m/s2,由上述公式计算得耗散功率与滑移率的相互关系如图1-17所示。比较相应路面上对应最大纵向力系数的滑移率Sc与对应最大耗散功率的滑移率Sw(表1-4),可以看到除了疏松积雪路面以外,Sw均略小于Sc,且与Sc相差不大,而μw与μc亦差别不大,这说明对应耗散功率极大值点的稳定控制力矩是合适的(耗散功率控制基本上等效经典的使滑移率接近Sc的控制)。在疏松积雪路面上,Sw明显小于Sc(Sc≈1)。这说明了利用耗散功率方法实现稳定控制的优越性,因为在疏松雪地上,当车轮滑移率较大,甚至接近1时,虽然纵向附着系数较大,但横向附着系数急剧下降,车辆极可能丧失转向能力或失稳。所以在疏松积雪路面上,使耗散功率最大的控制要优于经典的使滑移率接近Sc的控制。对比图1-16与图1-17可看出,耗散功率曲线在滑移率Sw的特征较之纵向力系数曲线在滑移率Sc的特征具有显著的优点,更易于用来稳定控制。
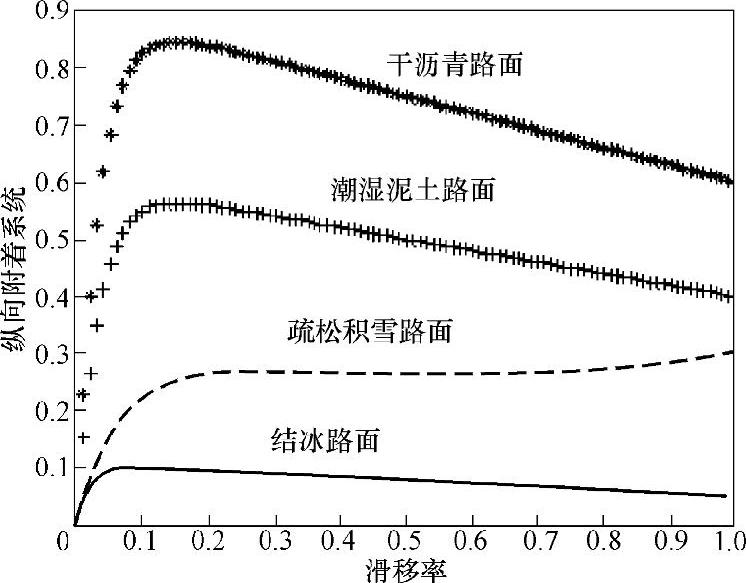
图1-16 纵向附着系数与滑移率的关系
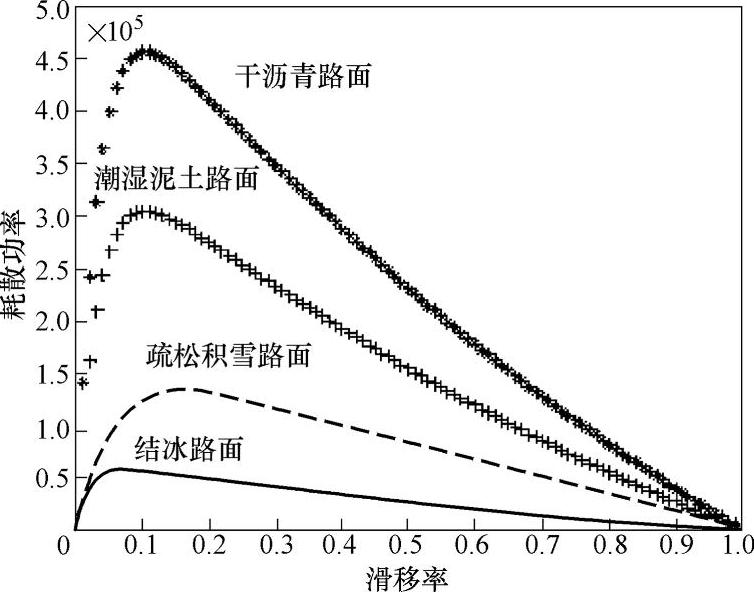
图1-17 耗散功率与滑移率的关系
表1-4 不同路面上Sc、μc、Sw与μw的比较(https://www.xing528.com)
为了能够实时实现耗散功率的稳定控制方法,须设计这样的算法:计算量不太大,用廉价工业单片机完成计算,不要求测量难于测量的或测量成本很高的系统参数,所需测量的信号均可以用技术成熟而廉价的传感器测得。考虑依据目标函数变化,直接调节力矩,使目标函数等效地实现最优控制,关键是设计一种算法,它能够搜索最优控制量,使系统到达目标函数状态。目标函数变化趋势是寻优中应注意的信息。
为了保证寻优的效果,对控制量搜索范围作出限制,以加速收敛,引入轮角加速度作为辅助判据。当角加速度大于正的上门限值a1时增压,当角加速度小于负的下门限值a2时减压。应用角加速度门限与逻辑门限法的区别在于|a1|、|a2|均取值较大,只起限制搜索范围的作用。虽然直接测量力矩在技术上存在困难,但力矩在车轮转动时与管路压力可近似看做正相关,当然,它们的关系是非线性的,还具有随机性。不妨将其视为外界干扰输入,采用适当算法抑制或补偿。
耗散功率稳定控制方法可利用ADAMS动力学软件进行计算,在仿真环境内构筑15自由度车辆模型,悬架形式为双横臂悬架,转向机构为齿轮齿条系统,转向齿条通过万向节、球铰与万向节臂相连。模型自由度包括车身6个空间自由度,转向轮转向自由度1个,4个车轮绕轴心的转动自由度合计4个,4个车轮在悬架约束下的摆动自由度合计4个,总计15个自由度。
用C语言程序实现动态寻优算法,利用ADAMS软件对高附着、低附着、对开、对接路面,直线、转弯工况下的控制过程进行计算。结果表明:该算法可自动适应路面变化,准确调节压力,使滑移率接近理想状态,实现减速能力、车辆运动稳定和行驶方向的可控性三者之间的和谐与稳定。车辆在控制过程中保持稳定和行驶方向的可控性,在实际控制中采用在线搜索方法可以迅速搜索到与路面附着情况相适应的压力,分别对各车轮的压力局部优化,相应局部最优解是全局控制的最优近似。
在仿真计算中,控制逻辑封装在一个子程序中,由ADAMS仿真环境调用,程序无需处理进程管理、定时、信号测量、输出驱动等环节,而在单片机的程序中,必须自行编程解决上述问题。单片机的资源有限,控制算法必须进行调整以适应单片机计算。单片机没有浮点运算单元,采用软件模拟浮点运算不仅速度慢,而且需要大量内存,故单片机不宜采用浮点运算。用定点运算代替浮点运算,并保证计算精度,采用将计算值同比例放大一定倍数的方法来改善精度。同时,尽量使参与乘除运算的常数为2的整数次幂,可用移位代替较慢的整数乘除法,提高计算速度。对于控制软件须考虑如何抑制噪声干扰,需加入滤波和剔除错误信息的代码。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。