



为了提高程序效率,对算法进行了优化,关键在于减少重复计算和采用离线计算技术。在滤波中应用离线计算技术,通过对平滑、Butterfly、Bessel滤波器特性的分析,平滑滤波器稳定性好,但较高的阶数才能达到较好的滤波效果;Butterfly滤波器具有良好的频域截止特性,但存在时域脉冲偏大的缺陷,当有车辆脉冲干扰时,性能不理想;Bessel滤波器特性介于二者之间,时域性能好,频域截止特性比Butterfly滤波器稍差。选用三阶Bessel滤波器,其阶数是对内存、计算和容许延时等方面的要求综合考虑选定的。滤波器的形式为a0y(0)=b0x(0)+{b1x(-1)+b2x(-2)+b3x(-3)-a1y(-1)-a2y(-2)-a3y(-3)}
其中y(i)为滤波后的数据,x(i)为原始数据。可以看出,等式右边只有一项b0x(0)与当前点数据有关,因此可以在系统调度程序启动主控制程序之前,寻找系统空闲的时候离线完成对{b1x(-1)+b2x(-2)+b3x(-3)-a1y(-1)-a2y(-2)-a3y(-3)}的计算,从而提高系统资源的利用效率,缩短控制的滞后时间。
稳控系统电子控制逻辑框架如图1-19所示,以稳控系统中ESP为例,行驶中由于意外造成转向过度,而使后轮打滑。ESP利用制动力将前轮外侧车轮制动,前轮会有瞬间向外力量,同时防止后轮打滑。ESP依据横向加速度、转向角度及车速信号,若实际偏离比率大于预期偏离比率时,ESP会作动去补偿修正,修改车辆偏离路线,如图1-20所示。行驶中,由于车辆转弯时节气门开度过大致使车辆前轮打滑,ESP会作动于前轮内侧车轮,使车辆向内侧移动,依据驾驶人理想路线行驶,如图1-21所示。若实际偏离比率低于预期偏离比率时,ESP会降低发动机转矩来增加偏离比率,并适时作动内侧前轮制动,保持车辆稳定性。
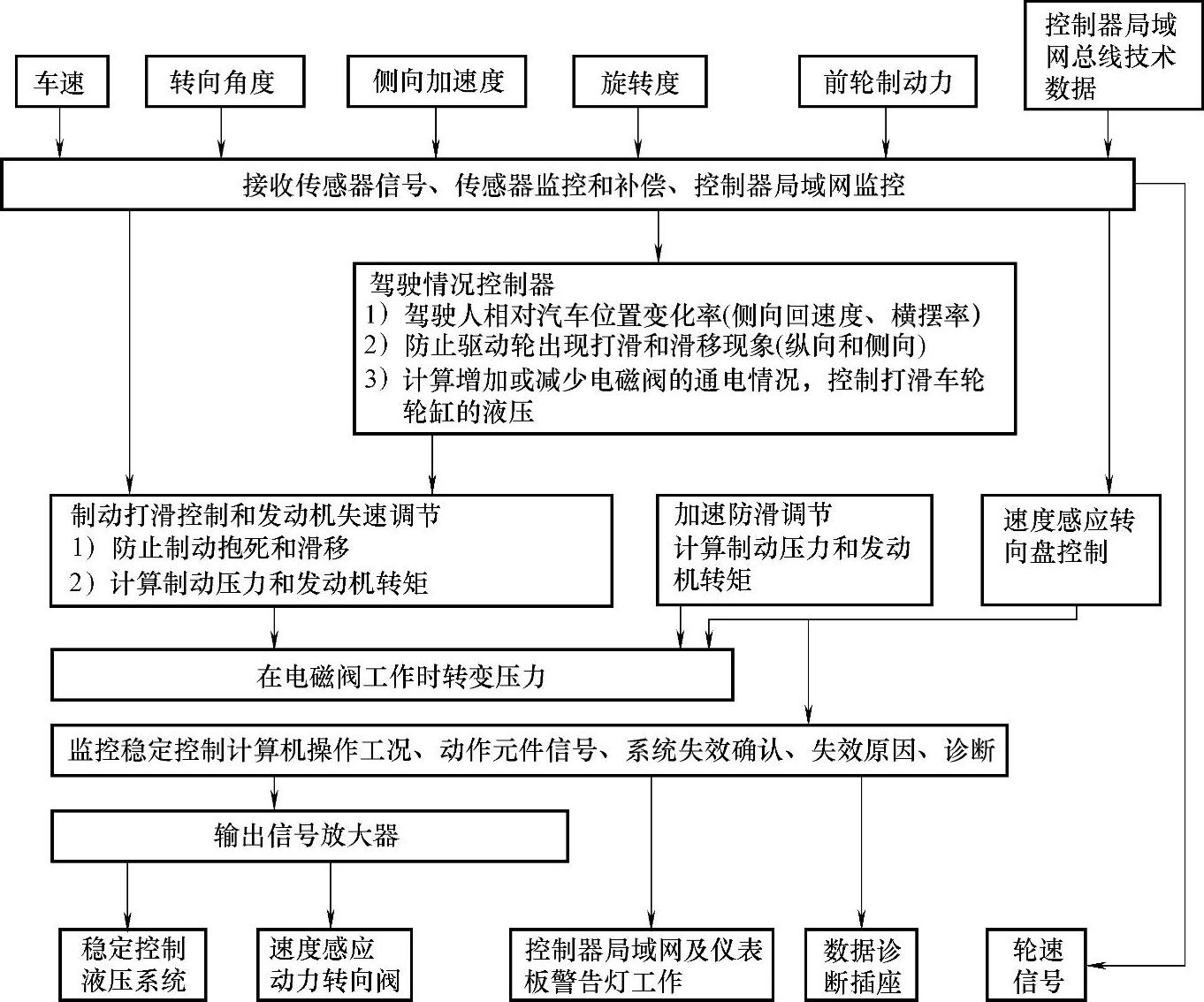
图1-19 稳控系统电子控制逻辑框架
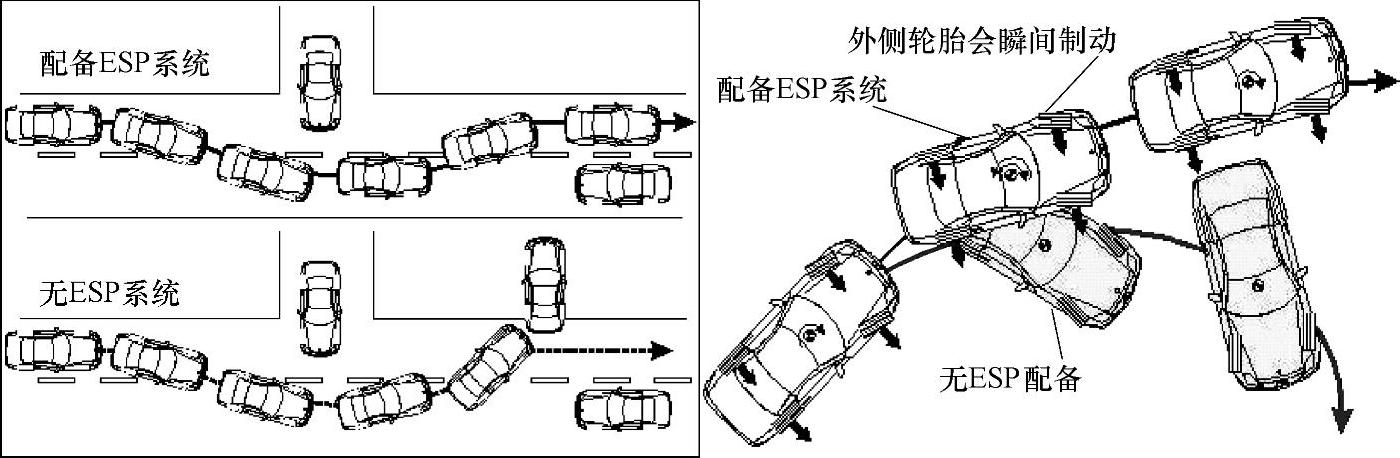
图1-20 过度转向电子控制模拟
驾驶人转向模型的基本思想是根据道路的位置及车辆状态,依据横向位置偏差建立指标,根据指标得到所需的转角,优化设计横向偏差指标,如图1-22所示。
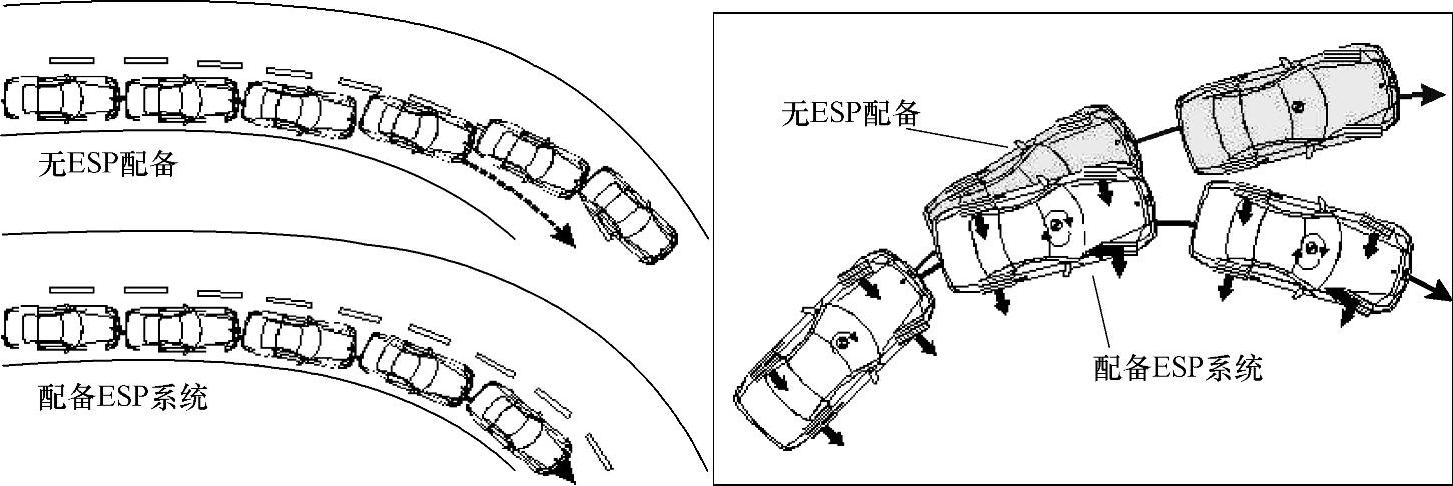
图1-21 转向不足电子控制模拟
对于二自由度车辆模型,输入为u时,状态x的变化可以写成:(https://www.xing528.com)

其中,x0为t=0时状态向量。输出y可以表达为
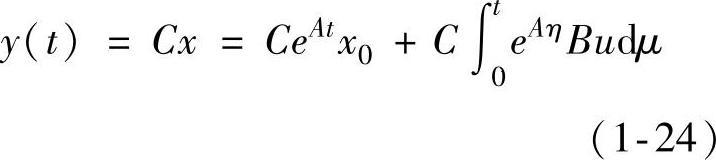
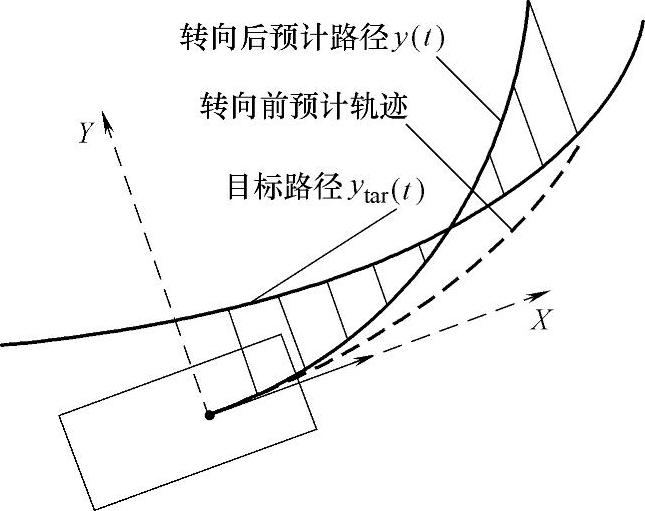
图1-22 驾驶人转向模型
假设目标位置为ytar(t),则横向位置偏差为

驾驶人模型取最优值并求解:

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。