



在某些装备了车身纵向加速度传感器的车辆稳控系统中,可以利用车身加速度信号进行车速的估计,能够提高参考车速计算的准确性。研究基于车身加速度信号的参考车速算法,首先需要了解加速度传感器信号的特点。加速度传感器安装在车身上,按照一定原理[119]将车身纵向加速度转化为电压信号输出,单片机可以通过A-D采样端口采集电压信号,测量程序再将其转换为加速度值。例如本章选用的加速度传感器的输出电压为0~5V,零点为2.5V,1V的变化幅度表示1.2g的加速度。电压值与实际加速度值的转化关系为

式中 g_value——车辆加速度;
g_signal——A/D采样的电压值;
g_zero——加速度传感器零点(2.5V左右)。
加速度传感器的输出电压大于2.5V表示正的加速度,输出电压小于2.5V表示负的加速度(即为减速度)。直接测量得到的加速度信号含有大量的噪声,如图4-14所示,无法直接使用,必须进行处理。
由于制造误差、安装位置不同等原因,加速度传感器的零点并不一致,使用时需要对加速度传感器的零点进行动态标定补偿。路面颠簸、车身振动对于加速度信号也有影响。尤其是路面坡度对加速度信号影响较大,当车辆行驶在上坡和下坡路面时,加速度传感器的采样值中含有坡度成分,即不完全表征车辆的加速度,使用加速度传感器信号需要考虑坡度带来的影响。由于直接测量得到的加速度传感器值不能表征真正的车辆加(减)速度,直接使用加速度传感器值积分进行车速估算不可行,图4-15所示为通过加速度传感器测量值直接进行积分计算得到的车速,可见其与实际车速差别较大。合理使用加速度传感器信号才能准确估计车速。假设车速是上述两个参考车速加权后的线性叠加,两个参考车速的权系数是时变的,与各自的置信度相关,例如基础参考车速源自参考轮速,若参考轮速斜率较大,参考车速需要插值得到。为建立参考车速的估计模型,引入置信度系数概念,置信度系数为不大于1的正数,表示其对应的参考车速可以信任的程度,置信度系数是时变的,按照一定条件计算得出,综合参考车速估计模型为
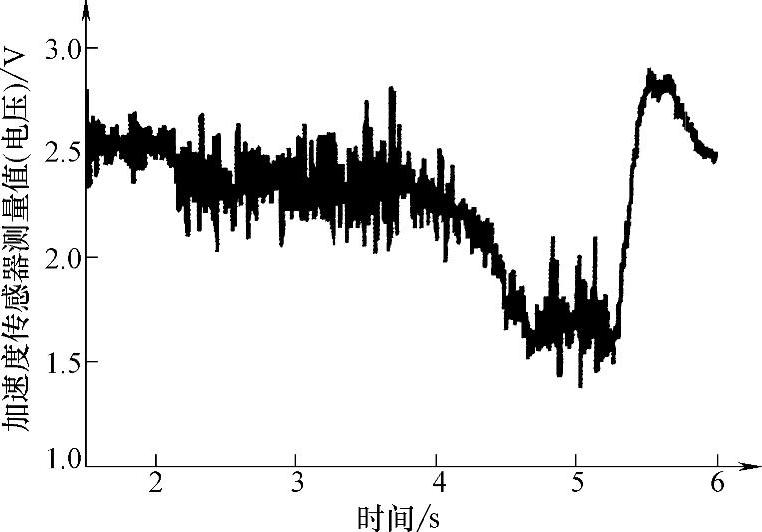
图4-14 直接测量得到的加速度传感器信号
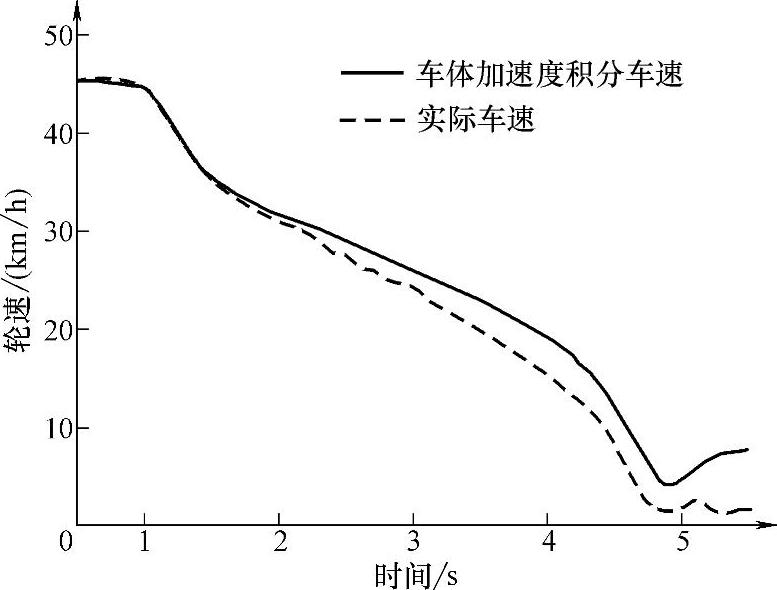
图4-15 车辆加速度积分参考车速

式中 Vwref——基础参考车速;
 ——补偿后的车辆加速度积分得到的参考车速;
——补偿后的车辆加速度积分得到的参考车速;
Vref——综合参考车速;
kw——基础参考车速的置信度系数;
ka——补偿后的车辆加速度积分参考车速的置信度系数;
ke——调整系数。
对于单片机采样转换单位后获得的车辆加速度信号值,需要进一步处理和补偿才能使用。处理主要分为滤波和零点补偿两个阶段,滤波是为了滤去高频噪声,零点补偿是为了修正路面坡度、安装误差等因素对加速度信号的影响。某次制动的滤波前后的加速度信号对比如图4-16所示,滤波后的信号已经比较平滑,满足使用需要。(https://www.xing528.com)

图4-16 车辆加速度信号滤波前后比较
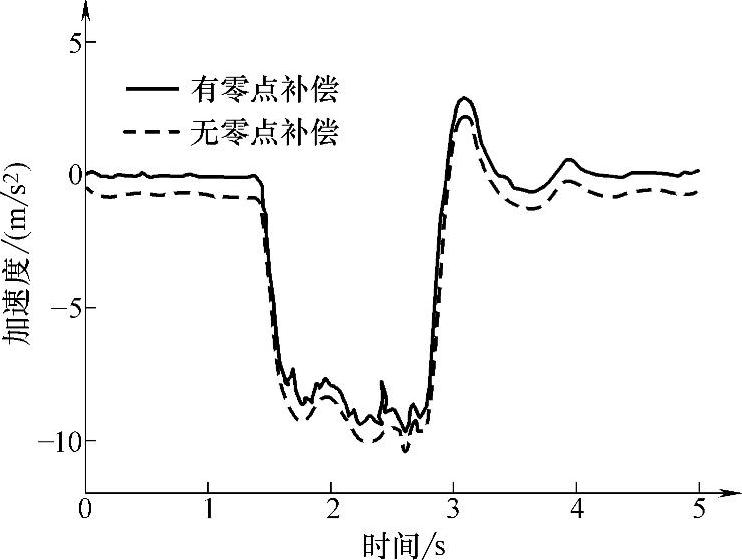
图4-17 加速度计算对比
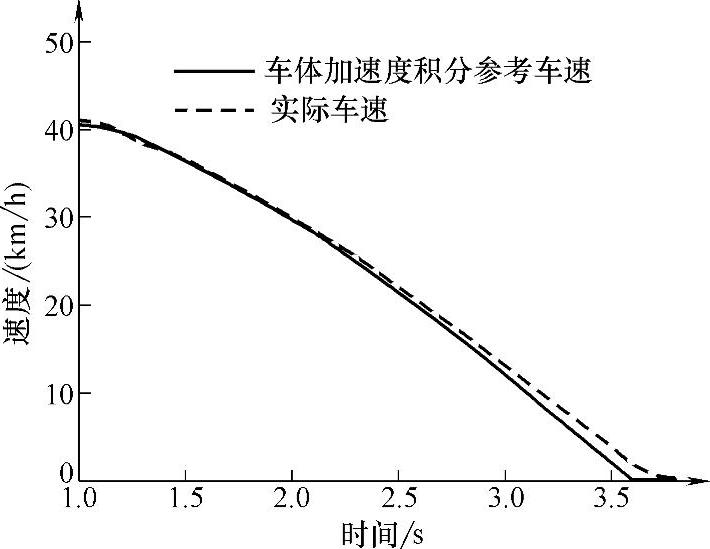
图4-18 加速度积分参考车速
对加速度信号进行零点补偿,思路为:车辆匀速运动的时候,实际车辆加速度为零,但加速度传感器采样值不一定为零,例如车辆匀速上坡的时候,此时的加速度采样值包含安装误差和上坡坡度成分。将车辆加速运动状态时的加速度采样值作为零点补偿,此补偿包含了制造、安装误差及坡度补偿。车辆处于匀速运动状态后,将加速度传感器采样平均值作为零点补偿。在实车的稳控系统控制程序中加入上述零点补偿程序,并将计算得到的车辆加速度值输出,同时将未做零点补偿的车辆加速度值一并输出。例如在某上坡进行制动时,其计算数据如图4-17所示。若不进行零点补偿,其得到的车辆加速度要比实际的小,补偿后的值符合实际情况。图4-18所示为对加速度传感器信号进行了滤波和零点补偿后,再进行积分得到的估计车速,可见其与实际车速比较接近。
基础参考车速的置信度系数kw由参考轮速的斜率和滑移率确定。基础参考车速由参考轮速插值得到,参考轮速的斜率越大,说明参考轮速与车速分离得越大,同时,计算得到的基础参考车速也与车速有一定的分离,此时基础参考车速的置信度低;同理参考轮速滑移率大,说明参考轮速与实际车速的分离大,而按照保守的斜率插值得到的基础参考车速与车速分离也大,因此置信度低。按照这样的规则根据实车数据标定置信度系数kw。车辆加速度积分参考车速的置信度系数ka由加速度传感器测量值与估计车辆减速度的差值的绝对值确定,差值的绝对值越大,表示车辆加速度积分参考车速越不可信。通过实车实验标定置信度系数ka。基础参考车速计算比较保守,小于车辆加速度积分参考车速,所以当基础参考车速大于车辆加速度积分参考车速时,说明车辆加速度积分参考车速的计算有问题,这时可认为其置信度为0。调整系数ke表示估算的综合参考车速的保守程度,ke为不小于1的数,其数值越大,表示综合参考车速的计算中基础参考车速所占的比重越大,加速度积分参考车速的贡献越小。
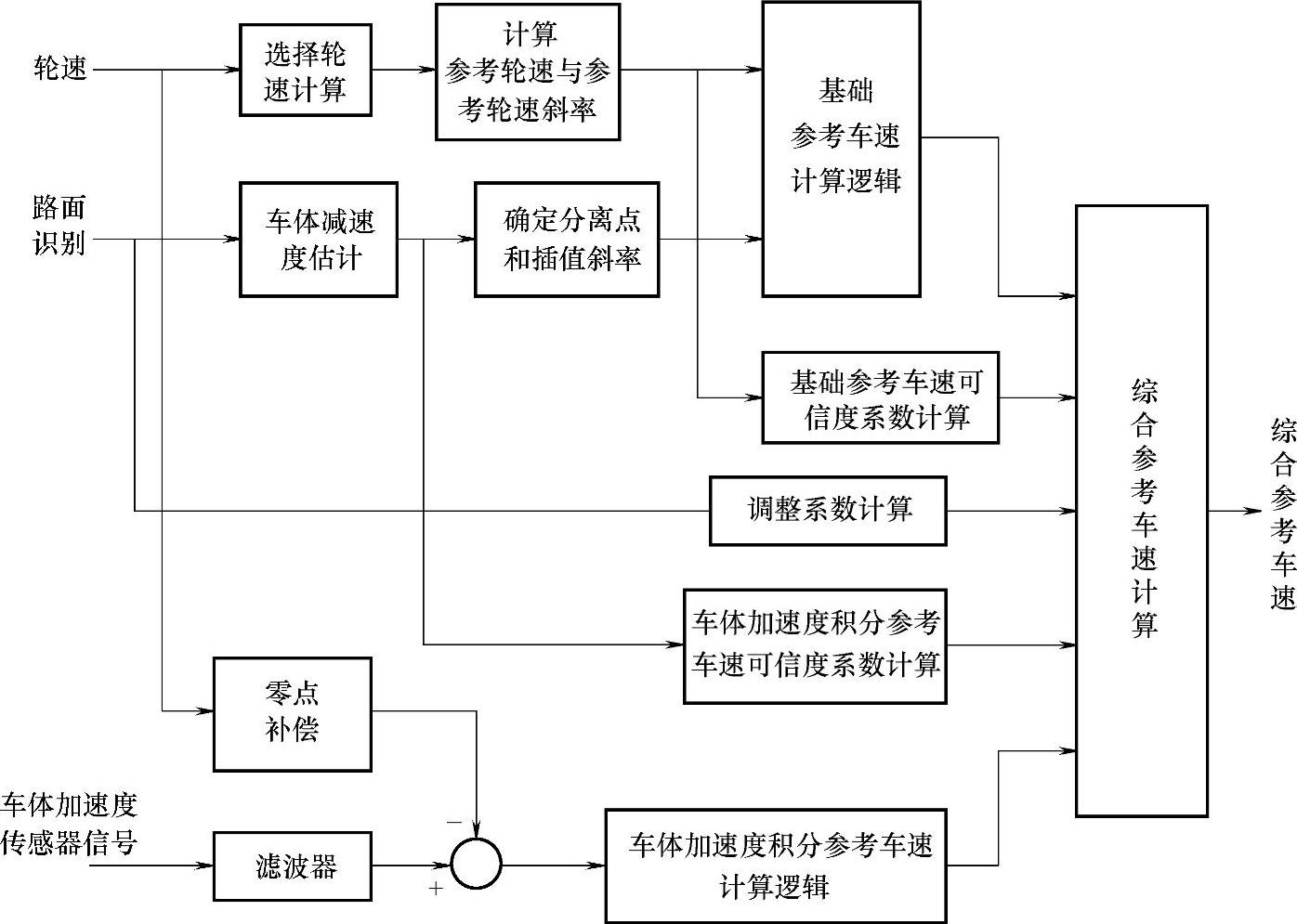
图4-19 综合参考车速算法流程框图
按照上述算法在稳控系统中构建综合参考车速的算法,算法流程如图4-19所示。对综合参考车速算法进行实车实验验证。将控制器实时计算的参考车速通过串口输出到上位机,同时和通过五轮仪采集得到的实际车速进行对比。图4-20所示为在高附路面上进行制动时综合参考车速和实际车速的对比情况,可见综合参考车速十分接近实际车速,计算准确。为了充分验证综合参考车速计算的可靠性,考虑两种特殊情况:基础参考车速偏差大、置信度低的情况,车辆加速度积分偏差大、置信度低的情况。在某次低附着路面制动中,实车实验获得的基础参考车速、车辆加速度参考车速和综合参考车速对比如图4-21所示。虽然基础参考车速偏差大,但综合参考车速算法能够及时识别,将基础参考车速的置信度系数降低,仍然可以得到相对准确的综合参考车速。车辆在某高附着的上坡制动,实车实验获得的基础参考车速、车辆加速度参考车速和综合参考车速对比如图4-22所示,虽然加速度信号置信度低,但综合参考车速算法能够及时判断出加速度信号置信度低并降低其置信度系数,仍然可得到准确的综合参考车速。
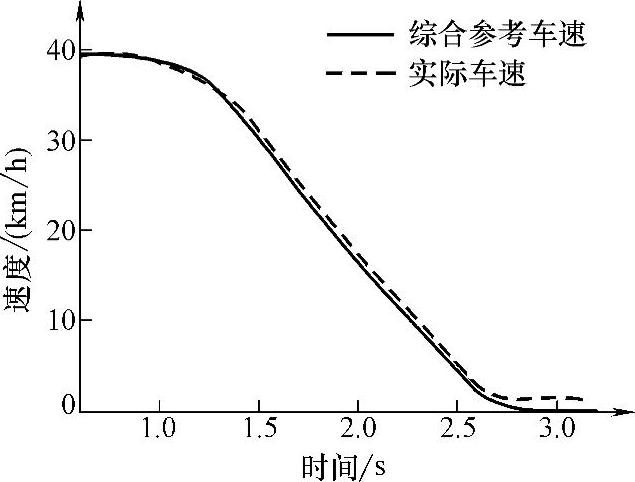
图4-20 高置信度高附车速曲线
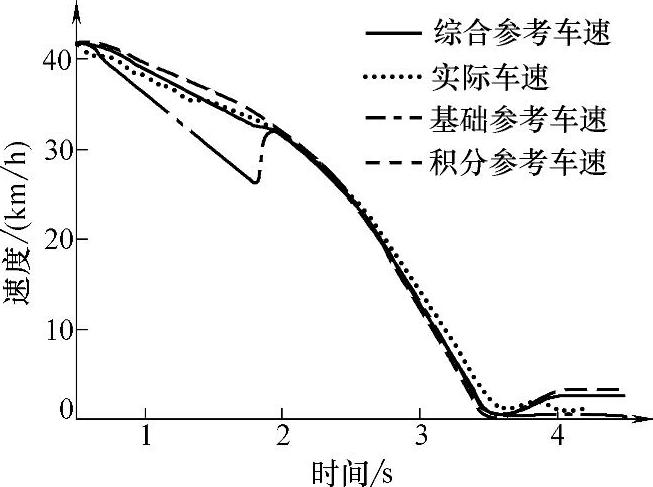
图4-21 低置信度低附车速曲线
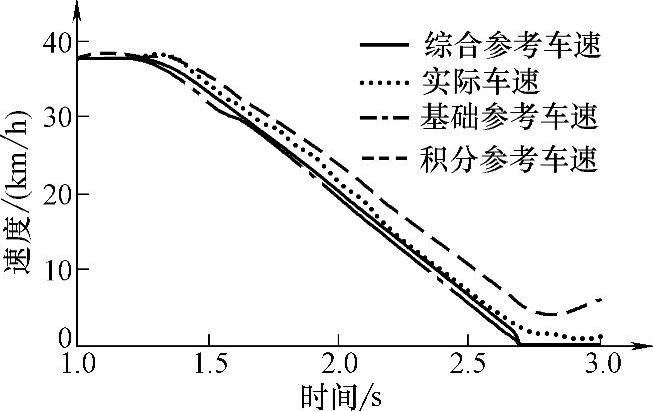
图4-22 低置信度高附车速曲线
引入置信度系数概念进行综合参考车速计算,可以适应不同的参考车速计算工况,实车实验表明,该方法准确、计算量小,可以满足稳控系统实时控制的需要。双层结构的参考车速计算方法适用于不同的稳控系统,第一层基础参考车速算法简单,不需要增加硬件成本,能满足控制需要;第二层综合参考车速算法,需借助车身纵向加速度传感器信号,通过加速度信号的处理和补偿、置信度系数估算,以第一层基础参考车速的结果为基础,综合计算得到更精确的参考车速,提升控制质量。实验证明,该算法准确、可靠性高、计算量小和实时效果好。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。