



1.地磁导航系统
如图6-24所示,地磁导航系统利用地磁作为导向的基准,它有一个双线圈发电机型地磁矢量传感器,作为方位传感器(罗盘传感器)。当励磁线圈加载交流电压时,磁场中心的磁力线发生变化。无磁场时,磁场中心的电压互相抵消。当外部磁场变化时磁力线不对称,输出电压成比例变化,从而确定汽车的行驶方向。罗盘传感器一般安装在内后视镜中,并用LED显示8个方向。这种汽车罗盘在使用中,由于人造强磁场和磁屏蔽等作用,需要经常进行校正和调整。
2.惯性导航系统
惯性导航系统实际上是通过电子陀螺仪测定汽车转弯角速度来确定汽车行驶方向变化的,因此也称为陀螺仪传感器。图6-25所示为其组成框图,传感器内封入氦气,由气泵压出氦气,并使气体通过装有两个金属加热线圈的检测器。当汽车直线行驶时,氦气同时通过两个加热金属线圈,使其均匀冷却并达到热平衡,电路的输出电压为0V。
当汽车的行驶方向发生变化时,则产生复合力,如图6-26所示,通过金属线圈的气流发生变化,热线圈冷却失衡,在电桥电路中产生输出电压,由此电压即可确定汽车行驶的角速度。在明确汽车行驶速度和行驶时间的情况下,就可检测出汽车的方位和转弯行驶距离。如果与地图结合,再加上显示装置,就可进行汽车导航并描绘汽车行驶的路径。
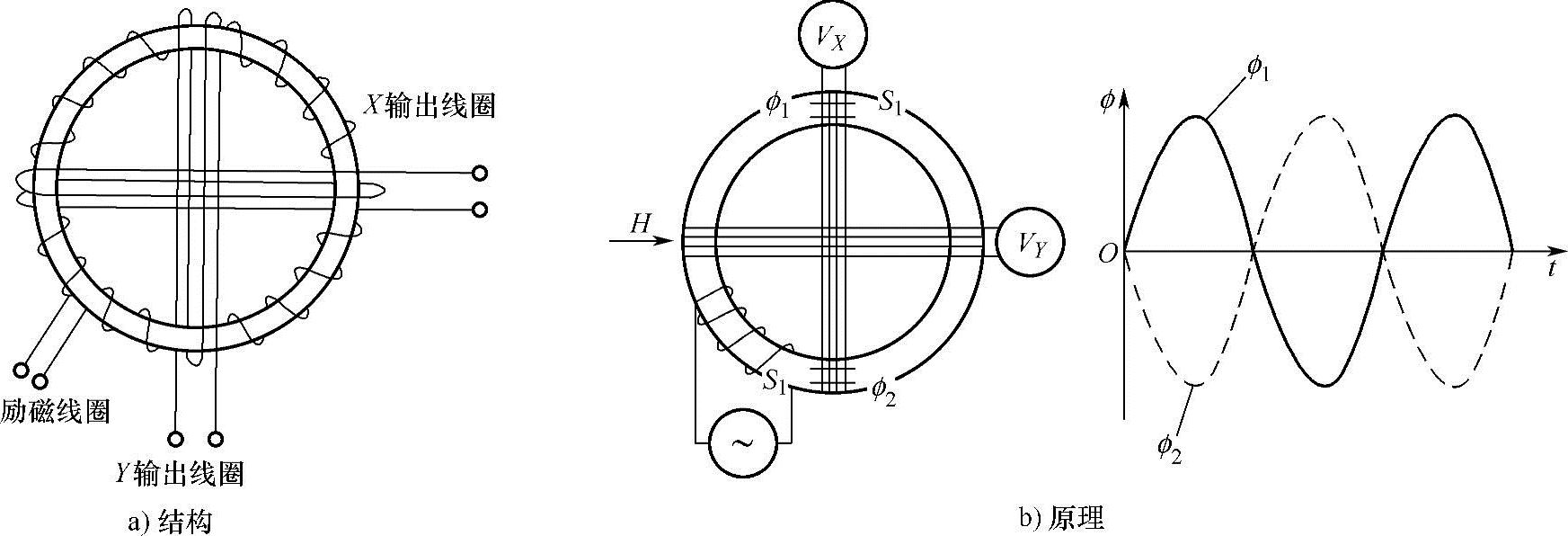
图6-24 罗盘传感器
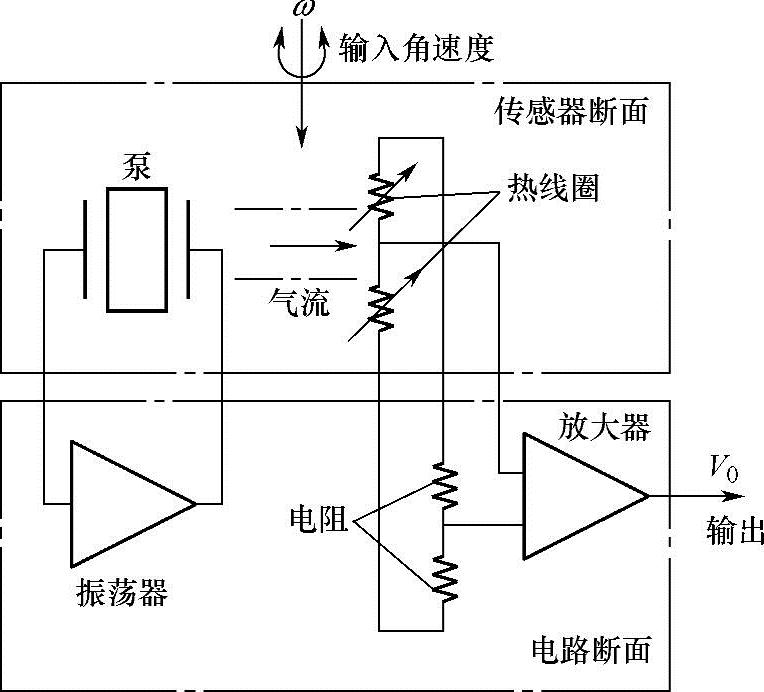
图6-25 陀螺仪传感器的组成框图
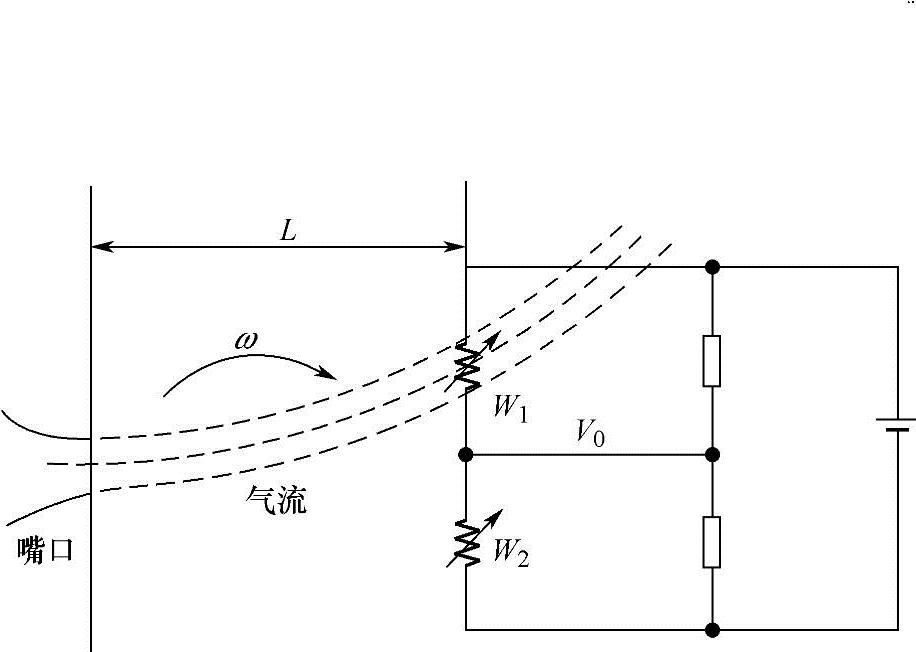
图6-26 陀螺仪检测原理
这种导航是相对导航,其精确性虽然不受信号影响,但与车速计算、道路倾斜度计算和存入地图是否正确有直接关系,并在下列情况下会造成车辆定位错误:
①发动机停止后,移动车辆(用渡轮或拖车移动车辆,车辆在回转台上旋转)。
②轮胎打滑造成行驶偏差。
③轮胎滚动直径变化(胎压异常、轮胎规格不正确)造成行驶偏差。
④在笔直或几乎没有弯道的高速公路上连续行驶造成导航发生偏差。
产生的上述错误将不断积累放大,因而也需要经常重新定位校正,基本是每次出发前都要进行定位———选择出发地和目的地。
3.自行导航
如图6-27所示,当汽车行驶在地下隧道、高层楼群、高架桥下、高山群间、密集森林等与GPS卫星失去联系的地段,中断信号的瞬间机内可自动导入自行导航系统。
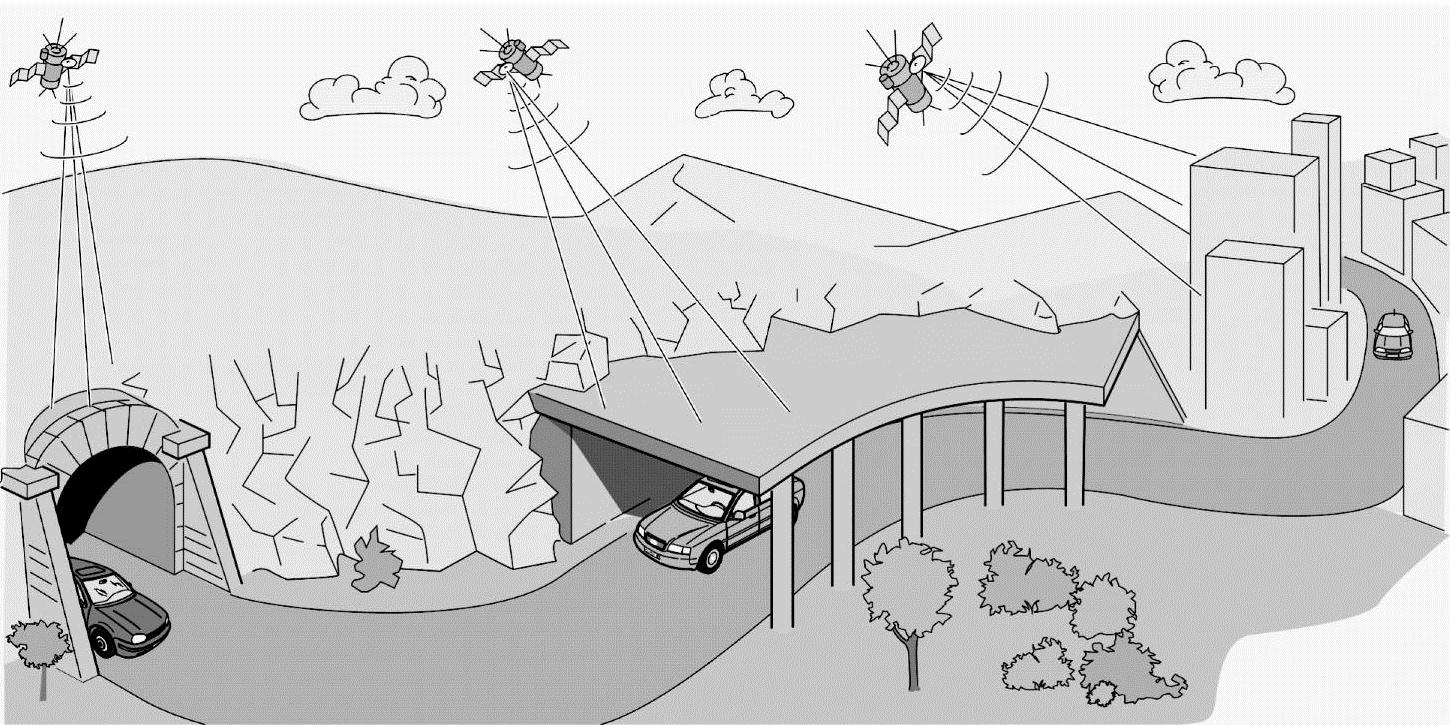
图6-27 车辆与GPS失去联系
自行导航系统是利用在汽车上安装角速度传感器(陀螺传感器)和车速传感器,根据车辆的行驶轨迹计算车辆的相对位置,从而测定汽车当前位置的检测方法。
(1)陀螺传感器 陀螺传感器直接检测出车辆前进方向的变化和行驶状态(即汽车前进的角速度变化值)。例如:当汽车行驶在沟状山道、发夹式弯路、环状盘形桥上或雪道原地打滑、更换轮胎、轮渡过河等情况时,所有这些曲线的距离都与卫星导航的经纬度坐标产生了误差,必须通过陀螺传感器的检测和导航ECU的运算才能得到汽车正确的位置。(https://www.xing528.com)
陀螺传感器安装在汽车电子导航的ECU内。目前,常用的陀螺传感器主要有振动传感器、光纤传感器和气体传感器三种。
陀螺传感器是利用科里奥利(对振动的物体加以角速度,其振动方向向垂直移动的动力学现象)力学原理设计出的角速度传感器。它由振动器和贴附在其上的压电陶瓷片组成,如图6-28所示。
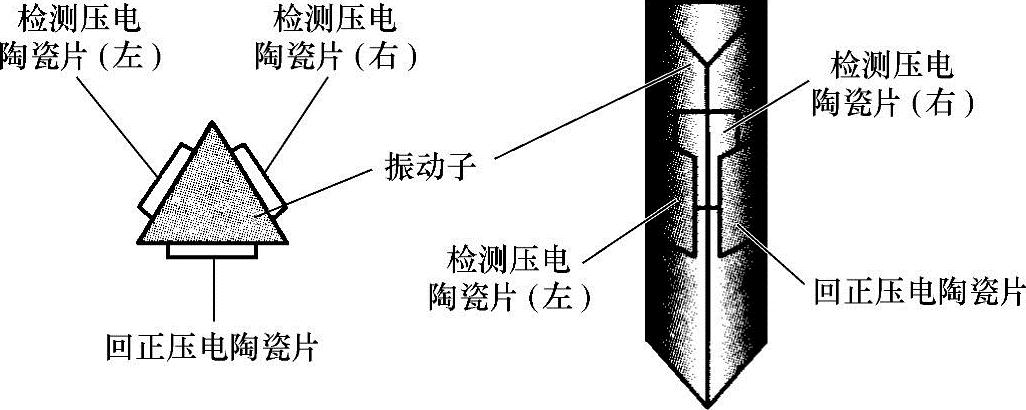
图6-28 振动陀螺传感器的结构示意图
陀螺传感器的工作原理是对振动子通以交流电使其振动,振动子的振动使压电陶瓷片产生交流电压。车辆在直行状态时,左、右压电陶瓷片产生的电压相等,如图6-29a所示。当车辆转弯时,由于科里奥利力学原理使振动子起作用,使左、右压电陶瓷片所输出的电压产生差异,根据这个差异测量出车辆的转弯方位和转弯角度,如图6-29b所示。
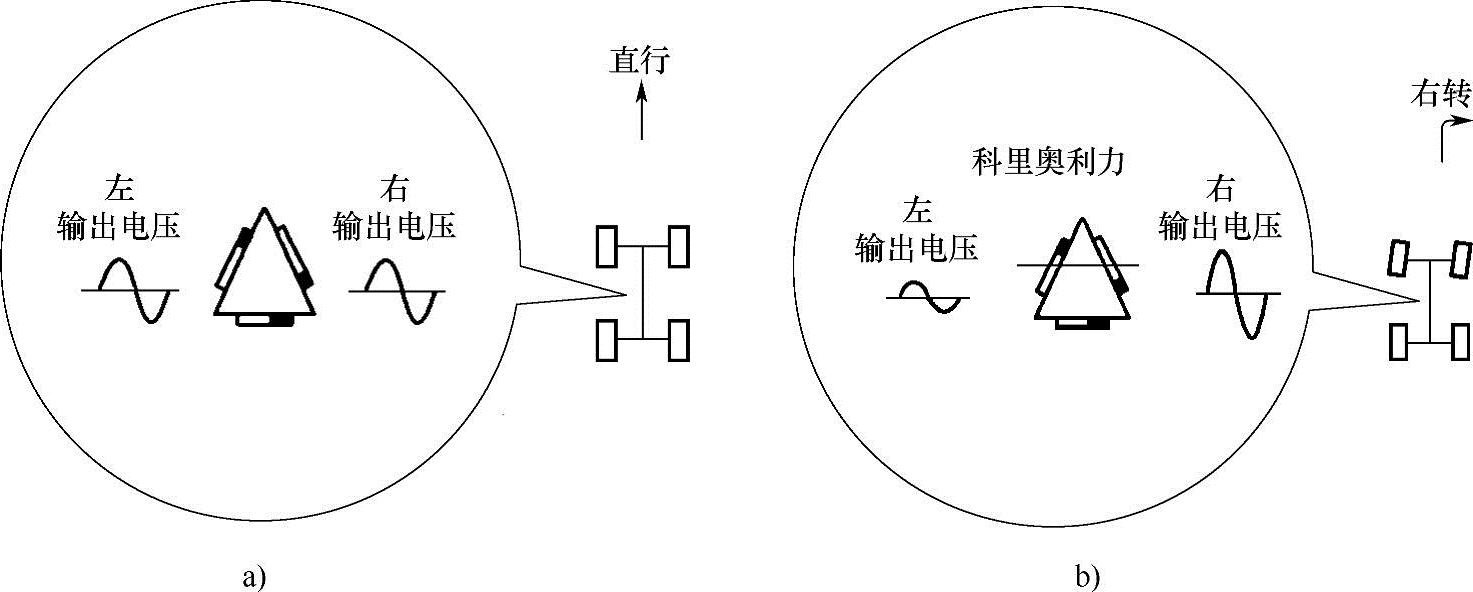
图6-29 振动陀螺传感器的工作原理
(2)车速传感器 车速传感器从汽车前进的速度中检测出车速脉冲(不同车型的车速脉冲值不同),再通过汽车导航系统ECU的数据处理,利用速度和时间的关系直接求出车辆前进的距离。导航系统采用了和ABS(防抱死制动系统)相同的车速传感器。汽车转弯时方向上的变化可以通过左、右车轮转速传感器的输出脉冲差进行检测,如汽车以R为转弯半径转θ角时,每个车轮按同一个中心进行旋转,如图6-30所示,汽车的前内、外车轮分别行走的距离Li和Lo,可通过以下方程计算出来:
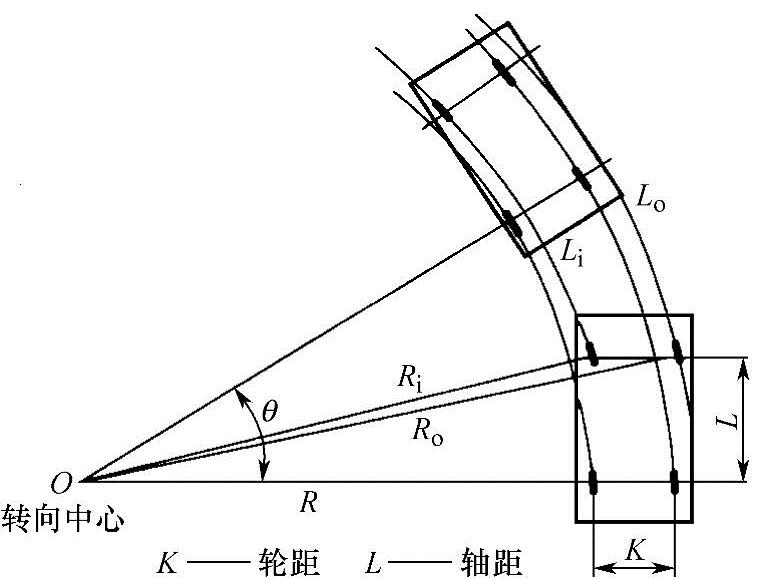
图6-30 汽车转弯时的车轮路线
Li=Riθ
Lo=Roθ
此时,车速传感器从汽车前进的速度中检测出车速脉冲(不同车型,车速脉冲值不同,要注意修正),通过汽车导航电控单元(ECU)的数据处理,利用速度和时间的关系直接求出前进距离。陀螺传感器直接检测出前进方向的变化和行驶状态(即汽车前进的角速度变化值)。例如:当汽车行驶在沟状山道、发夹式弯路、环状盘形桥上、原地打滑雪道、轮渡过河等地段时,所有这些曲线距离与卫星导航的经纬度坐标产生了误差,通过陀螺传感器的检测和微处理器的运算才能得到汽车正确的位置。
4.地图匹配器
由GPS导航与自行导航(包括车速传感器和陀螺传感器)所测到的汽车坐标位置数据及前进的方向与实际行驶的路线轨迹在电子地图上都存在一定误差。为修正这两者的误差,确保两者在电子地图上路线坐标相统一,必须采用地图匹配技术,即在导航系统控制电路中要增加一个地图匹配电路,对汽车行驶路线(各处传感器检测到的轨迹)与电子地图上的道路误差进行实时数字相关匹配,做出自动修正。经过导航电控单元(ECU)的整理程序进行实时快速处理,得到汽车在电子地图上指示出的正确位置路线。
由于汽车行驶中接收到的GPS信息、陀螺传感器检测到的正确前进方向和车速传感器检测出的前进距离这3组数据经过电子地图匹配器得到自动修正,从而完成了高精度导航。地图匹配器修正路线如图6-31所示。
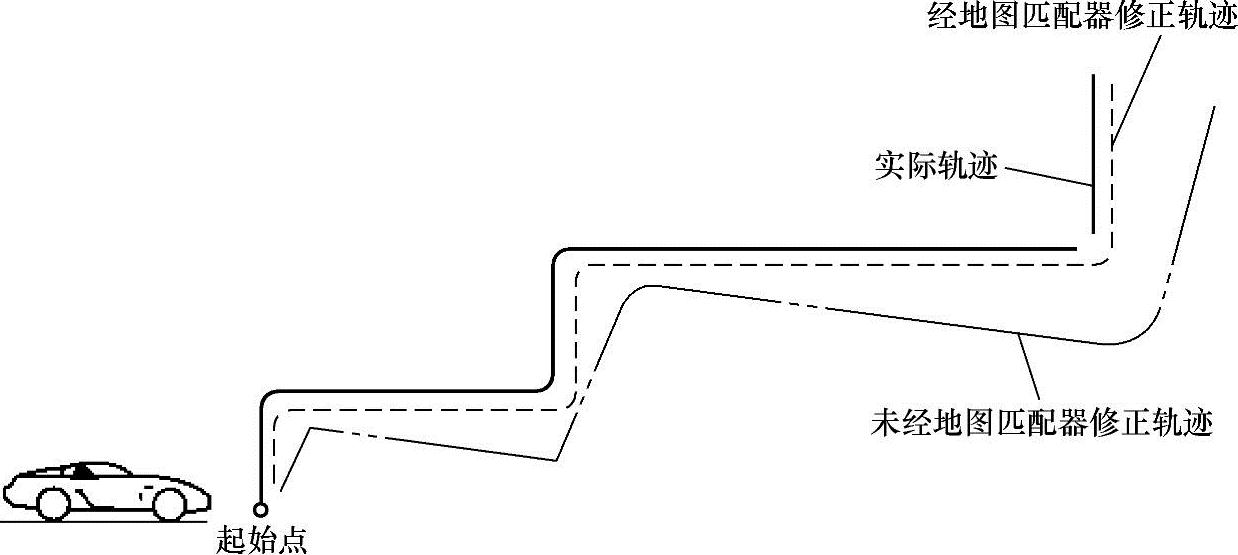
图6-31 地图匹配器修正路线
在以下情况或者难以接收GPS信息的驾驶情况下,汽车位置可能是错误的。此时,显示器的当前位置标记需要手动修正:
1)在地图匹配中,判断了汽车当前行驶道路并重新定位后,将显示到达目的地的可选线路及其优先顺序,如果距离或方向有误差,则到达目的地的可选线路将以不同的优先顺序显示,从而避免错误线路。
2)新的道路没有记录在地图中时,或者由于道路维修使所记录的道路分布与实际不相符时,地图匹配不能正常工作。当所行驶的道路不在地图中时,地图匹配功能可能找到另外的道路和位置,并在其上做出当前位置标记。5.RF调制解调器和RF天线
使用RF调制解调器和RF天线接收主控中心发出的信息,同时可反控汽车,实现动态导航。通过RF调制解调器建立与交通信息系统(VICS)的联系,得到交通堵塞、道路障碍、施工、停车场情况及交通规则变化等实时交通信息,使驾驶人做出快速反应,从而有效解决城市交通堵塞问题。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。