



新型多用途反恐防暴机器人分为作业端和操控端两部分,由七大系统组成,分别为履带式车载平台系统、视觉监测系统、运动控制系统、无线通信系统、能源动力系统、武器发射系统及人机交互系统。新型多用途反恐防暴机器人的系统构成图如图1-1所示。
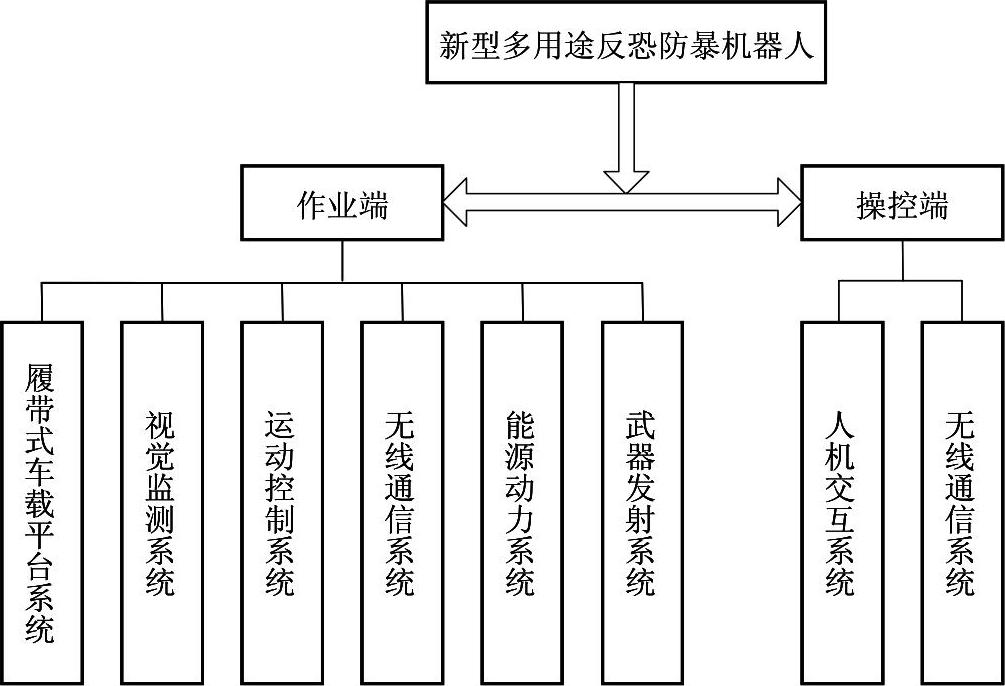
图1-1 新型多用途反恐防暴机器人的系统构成图
1.履带式车载平台系统
新型多用途反恐防暴机器人的履带式车载平台系统由平台机身、平台机盖、履带、承重轮、张紧轮、悬挂系统、张紧轮位置调节系统等组成,其设计效果的好坏直接影响机器人的动力性能和震慑效果。考虑到国内外小型反恐机器人居多,不能真正起到反恐防暴及压制震慑的效果,在开展车载平台的结构设计时,一是注重平台外观的震慑效应,研发具有实际应用价值、能够起到反恐震慑效果、真正在战场作战中有优良表现的平台;二是为反恐作战服务,使平台在战场复杂条件、恶劣环境下仍能够保持高效运动。因此该系统主要研究高性能履带式移动平台的结构造型与仿真,并能够在目前已研制成功的履带式平台的基础上开拓创新,设计研究更高质量和性能的机器人移动平台。
2.机器人视觉监测系统
机器人视觉监测系统的设计任务为:①对战场环境能够进行大场景观测,实时传输战场情况图像,使操控者能够根据战场情况做出判断,调整控制策略,并能够昼夜使用,打破常规机器人夜晚无法使用的限制;②具有昼夜瞄准功能,能够随防暴弹发射器的运动调整监测场景,有效地发现目标、锁定目标、瞄准目标,提高防暴弹发射精度;③能够对机器人所行走的路面情况进行实时监测,并能够昼夜使用,保证机器人能够有效选择有利地形、地势行进,保证作战任务的顺利进行。
在这些需求下,新型多用途反恐防暴机器人采用三路视频采集机制,视觉监测系统包括大场景检测远红外摄像头、防暴弹发射瞄准远红外摄像头、机器人前端路面监测远红外摄像头、视频采集卡、视频无线发送模块、视频无线接收模块。视频无线收发模块使视频传输与控制指令的无线传输分离开来,保证了各种无线信号传输的实时性,有力地提升了机器人视觉监测的效果。研究重点是视频图像捕捉算法、实时高效的图像传输及视觉监测系统与各系统的有机集成。
3.运动控制系统
机器人运动控制系统是机器人具备优良运动能力的可靠保证,其主要部件包括两台大功率无刷直流电动机及其驱动器、两台步进电动机及其驱动器、机器人主控计算机、减速器和驱动轮等。主控计算机为机器人的核心控制部件,控制策略的研究、选择及其实现是机器人实现多功能、多用途的关键;直流150V供电的大功率无刷直流电动机确保了机器人强劲的动力性能,以色列ELMO数字伺服电动机驱动器配有API函数库使控制编程简单方便;静力矩为5.0N·m的步进电动机能够保证发射器在携带多枚防暴弹时灵活转动,在全空间范围内对敌目标进行瞄准并实施攻击,同时步进电动机成本低、控制简单,具有很大的实用价值和研究意义。(https://www.xing528.com)
4.无线通信系统
无线通信系统由无线网桥和天线构成,机器人控制指令的收发均通过该系统完成。为保证控制指令的无差错、无延时传输,必须配备高性能的无线局域网收发装置,因此无线局域网装置的选择及网络编程中的有关协议成为该系统研究的重点。美国Axelwave局域网专业公司生产的AX9000PE-30无线网桥及XA-212天线以其出色的性能保证了该机器人控制的实时性,为高性能无线控制反恐防暴的研究积累了经验。
5.机器人能源动力系统
机器人能源动力系统采用电池供电的方式,摆脱了传统拖缆供电带来的不便,使新型多用途反恐防暴机器人可真正实现野外作战。能源动力系统是机器人的“心脏”,负责各个系统的电力供应,为保证机器人稳定运行,电力供应的稳定是关键环节,必须投入充裕的人力、物力加以研制。在供电任务中,主要有150V直流大功率无刷直流电动机驱动器供电、48V直流步进电动机驱动器供电、24V直流无线网桥供电、24V警灯供电、12V直流主板供电、12V直流视觉监测摄像头供电、12V直流视频无线收发模块供电及机器人专用操控箱的交流供电。由于机器人由多系统组成,增加了复杂性,因此电源电路设计、电气设计、布线与确保电气接口安全、确保动力系统安全成为能源动力系统研究的关键。
6.武器发射系统
武器发射系统由防暴弹发射器、特种弹药、弹药箱及发射电源组成,是新型多用途反恐防暴机器人执行反恐防暴任务的作业系统,特点是远距离、跨区域打击。武器发射系统主要研究防暴弹发射器的结构造型、仿真及加工,特种弹药模型的造型、仿真及加工,并涉及防暴弹发射触发式电源。因防暴弹发射电源触发模块有一套相关的军用标准,有成品可供选择,所以并不是本作品的研究重点。
7.人机交互系统
人机交互系统是进行机器人控制的重要装置。操控人员需要通过操控端的液晶显示器了解战场情况,并做出控制指令的判断,进而操控机器人做出相应的动作。为此需要研究友好的用户操作界面,并结合机器人多任务、多系统的特点,制定有效的控制策略,简化开发程序的代码,简化操控面板的设计,同时还要做到低成本。为此没有使用市场上价格昂贵的工控机操控箱,自主开发了专用于“新型多用途反恐防暴机器人”的操控箱,既锻炼了制作者的能力,又降低了成本。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。