



千足虫宠物机器人的控制系统总体框图如图8-41所示。整个控制系统主要包括控制模块、电源管理模块、电动机驱动模块、通信模块、传感检测模块及电动机执行模块。
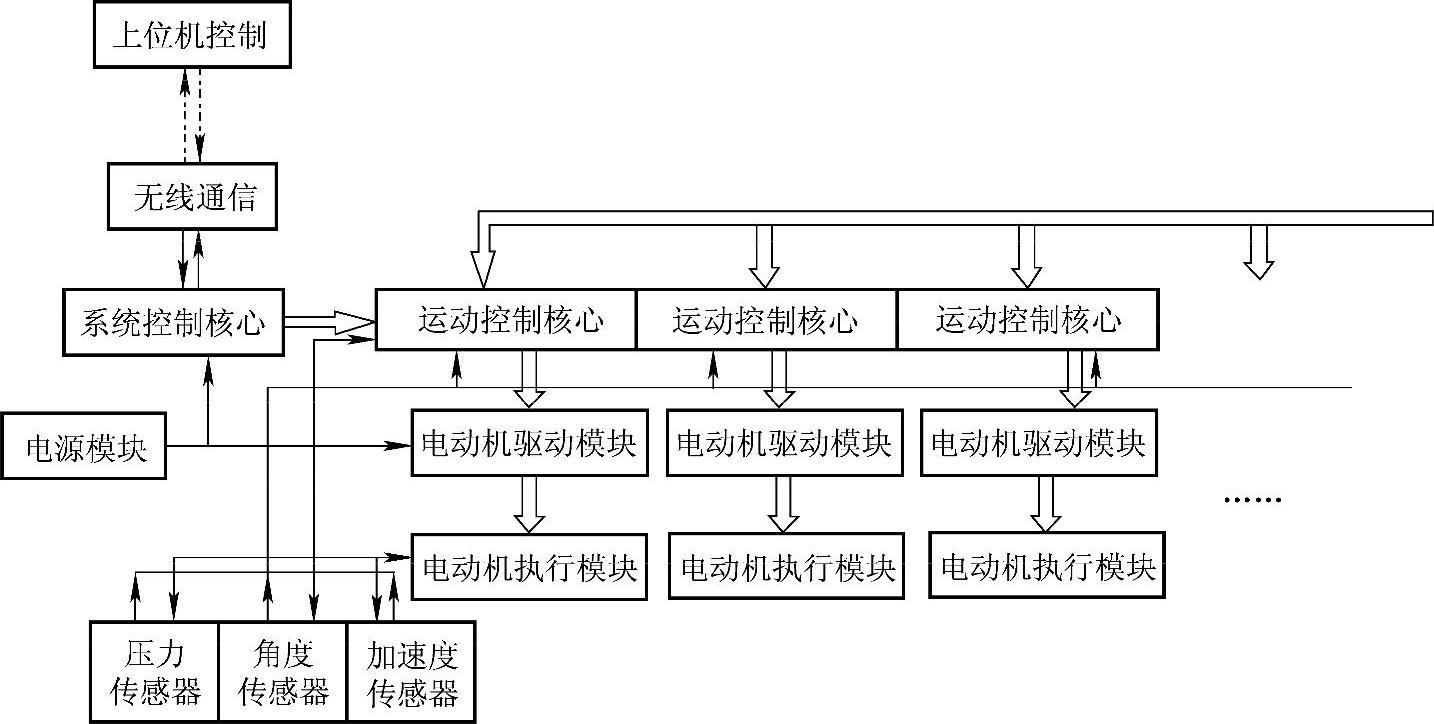
图8-41 控制系统总体框图
由于千足虫宠物机器人的机械部分采用模块化设计,可以自由增减肢节,在控制系硬件电路设计方面,也要适应这一特点,可实现电路的增减。硬件电路设计采用总分模式,如图8-42所示。主电路用于高层控制、对外通信及摄像头、无线模块等外设的控制,可以同时对所有的分电路进行控制,处理分析各个分电路传回来的信息。各个分电路功能相似,采用模块化设计,分别控制各个肢节实现各种步态动作,可以随机械结构一起增减,并且各个分电路之间可以依次向后传递数据,用于实现步态数据的依次传递。
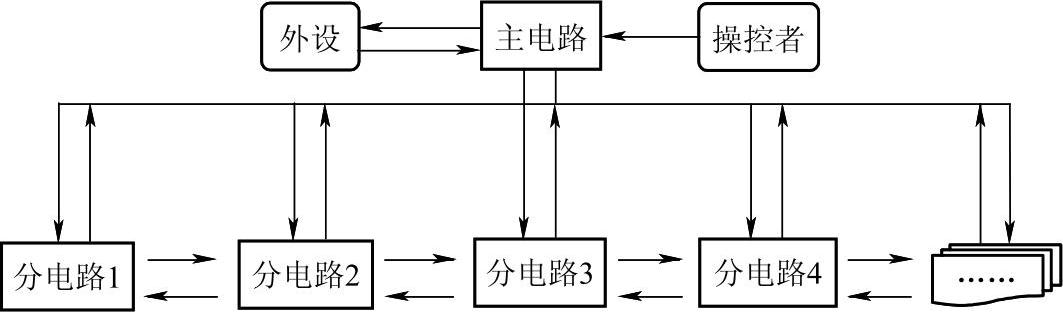
图8-42 硬件电路设计思路图
在标准的8足形式下,机器人具有46个自由度,也就是说电路需要稳定地控制46个电动机,实现多种运动模式、多种运动姿态的完美结合,所以在电路设计方面,要充分考虑到控制量众多的情况。经过研究,机器人的控制系统采用遥控与自主控制相结合的形式,根据执行任务的复杂程度采用不同的控制方式,保证机器人具有超强的运动功能和众多的动作方式。
硬件电路实现的主要功能分为以下几个阶段:
1)可以较好地驱动控制多个电动机(八足形式下为46个)。
2)使机器人能够按照预定程序实现多种步态。
3)机器人能够与外部进行通信,接受外部人员指令,依据远程遥控对其进行操作,增强其应对环境的能力,提高娱乐程度。
4)机器人能够依据自身传感器获得的数据,自主分析周围环境,与使用者形成互动,实现智能化的目标。
1.控制模块
针对控制系统的特点,选用美国ARM公司生产的32位STM32为核心微处理器,以实现对多伺服器的高速控制,使机器人能高效流畅地展示出多达几十种的运行步态。STM32F103芯片如图8-43所示。该芯片的内核为32位的CortexTM-M3CPU,具有最高72MHz的工作频率,能够满足响应时间要求。它拥有3个通用定时器,一个高级控制定时器(PWM定时器),能够输出12路PWM波,便于精确控制电动机。另外,它有2个SPI,2个I2C,3个串口,51个GPIO端口以及2个12位ADC模块,电路可扩展性强。与其他模块的接口参数如下:需要提供2.0~3.6V的工作电压,用于维持芯片正常工作;I/O口最大承受电压为5V,故输入信号电压应在5V以下;输出电压在3V左右,输出电流可达8mA。控制模块电路图如图8-44所示。
图8-43 STM32F103芯片
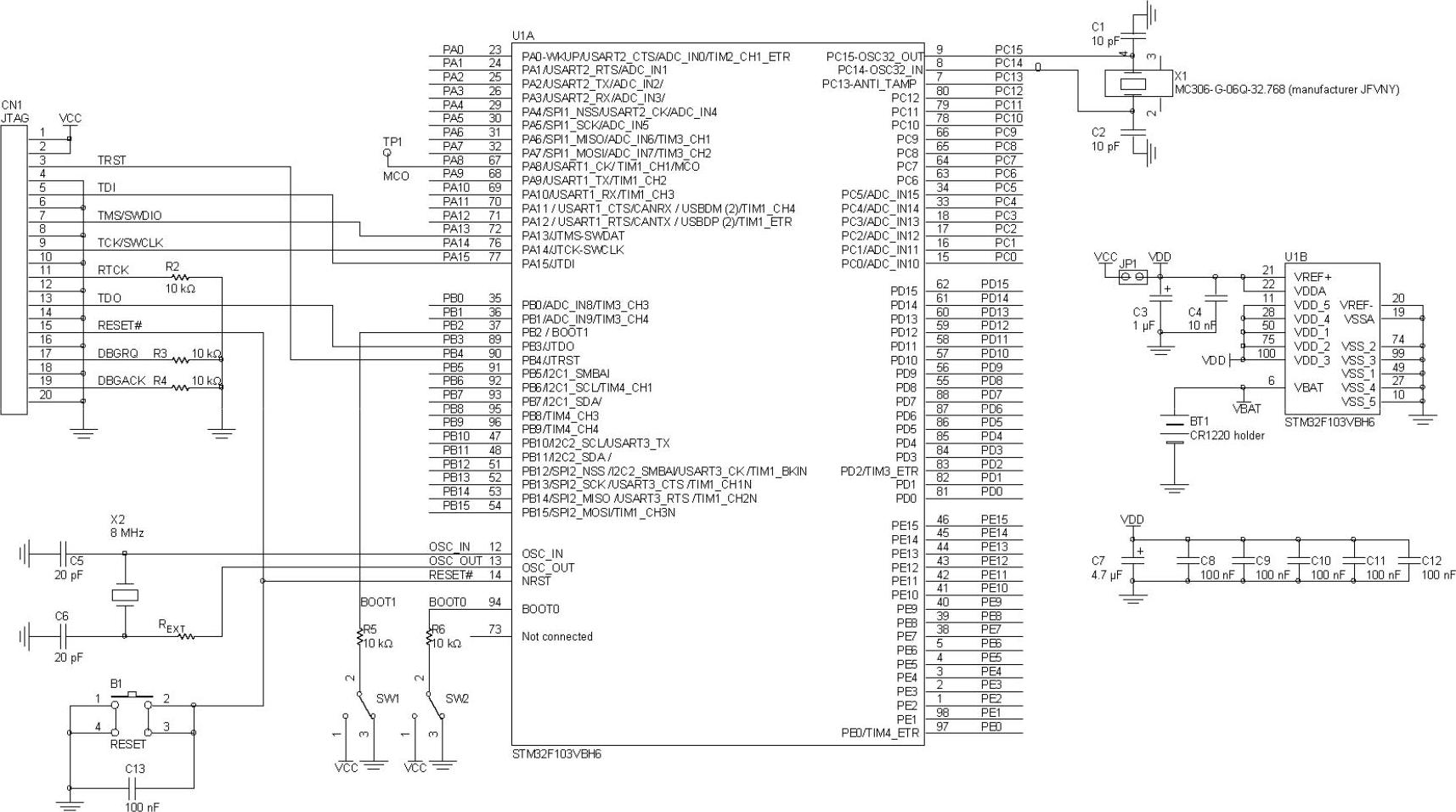
图8-44 控制模块电路图
2.电源模块
由于机载设备较为复杂,无法将各供电电压统一,所以需要对设备供电系统进行设计。首先分析各模块的电压要求。
STM32F103芯片的供电电压为2.0~3.6V,无线模块NRF24L01的供电电压为1.9~3.6V,加速度传感器模块的供电电压为2.4~3.6V。故采用3.3V电压对以上各部分进行供电。
L298N电动机驱动芯片需要的供电电压为4.5~7V,摄像头的供电电压为5V,MAX485芯片的供电电压为5V,故采用5V电压对以上各部分进行供电。
实现腰部上下运动及腿部Z轴方向旋转所需的直流角位移伺服电动机Hitec HS-7980TH与辉盛MG995的供电电压为7.4V,故需要7.4V电压供电。
实现腰部左右运动及腿部Y轴方向旋转所需的直流角位移伺服电动机XQ-S4230D的供电电压为12V,故需要12V电压供电。
脚部Maxon直流空心杯电动机的供电电压为24V,故还需要24V的电压供电。
综上所述,需要提供的电压有3.3V、5V、7.4V、12V和24V。
由于3.3V和5V主要是芯片供电,不需要太大的功率,故可以通过降压获得,而直流角位移伺服电动机的消耗功率比直流空心杯电动机大,所以采用7.4V与12V双电池供电。其他电压值均通过升压或降压获得。选用的电池参数见表8-3。
表8-3 选用的电池参数

为了实现电压变化,采用升压及降压模块来实现电压升降。
(1)7.4V-5V 采用LM2596降压模块,降压电路如图8-45所示。LM2596T-5.0芯片的输入电压要求是7~40V,输出电压为5V,输出负载电流为0.2~3A。
(2)5V-3.3V 采用LM1117降压模块,降压电路如图8-46所示。LM1117DT-3.3芯片的输入电压要求是4.75~10V,输出电压为3.3V,输出电流为0~800mA。
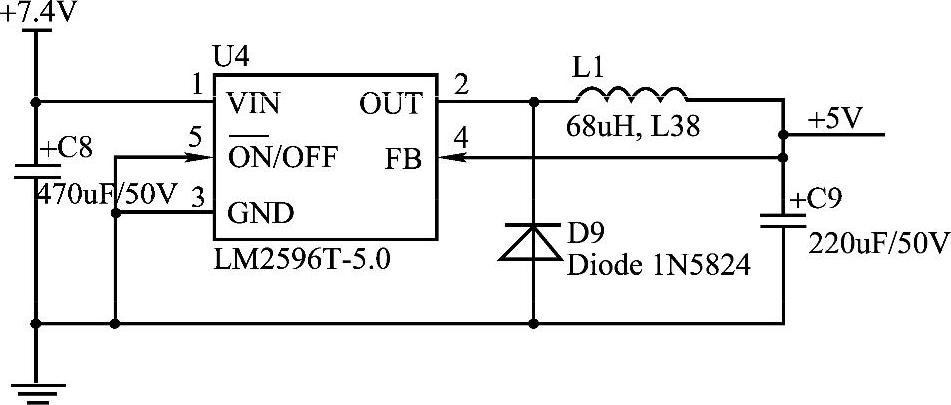
图8-45 7.4V-5V降压电路
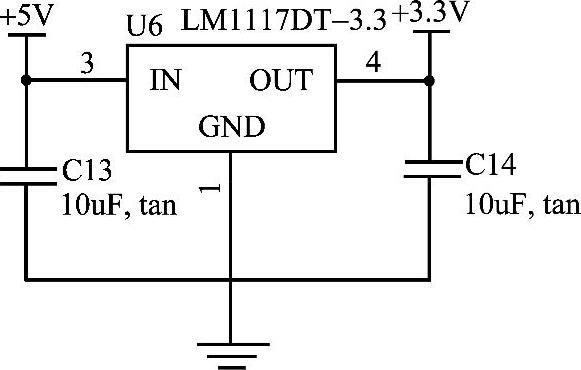
图8-46 5V-3.3V降压电路
(3)11.1V-24V 采用LM2577升压模块,升压电路如图8-47所示。LM2577S-ADJ芯片的输入电压为3~30V,输出电压为4V-35V。
总结起来,电压转化可以用图8-48表示。
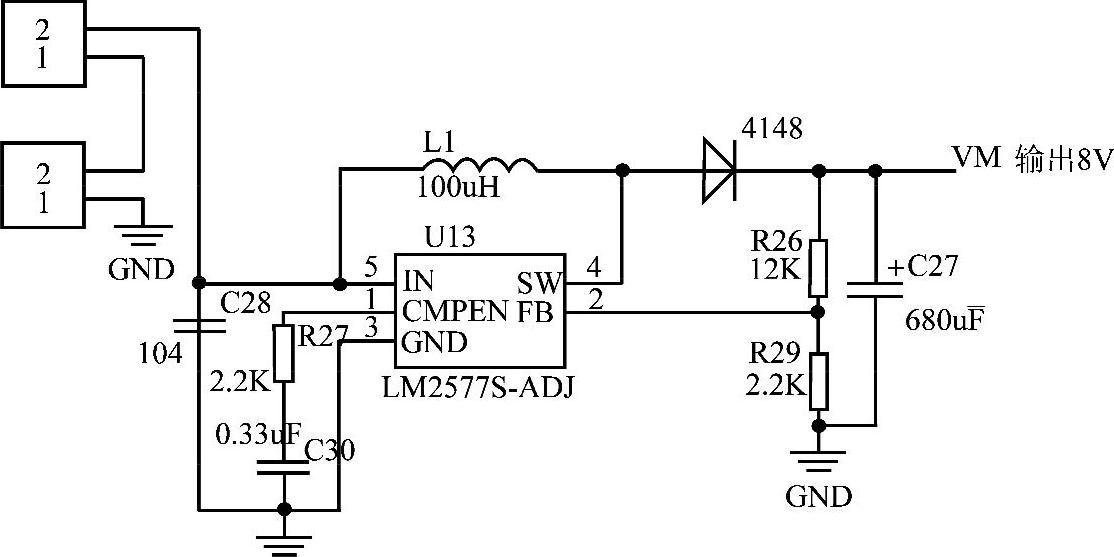
图8-47 11.1V-24V升压电路
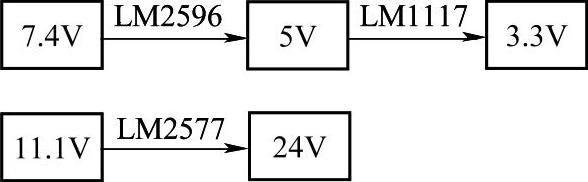
图8-48 电压转化
3.电动机驱动模块
为了实现对脚部直流空心杯电动机的驱动,采用L298N电动机驱动芯片。L298N是SGS公司的产品,内部包含4通道逻辑驱动电路,是一种二相和四相电动机的专用驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电动机。同一芯片上集成有CMOS控制电路和DMOS功率器件,利用它可以与主处理器、电动机和增量型编码器构成一个完整的运动控制系统。将其放置于分电路板上,正好驱动同一体节脚部的两个电动机,其电路图如图8-49所示。
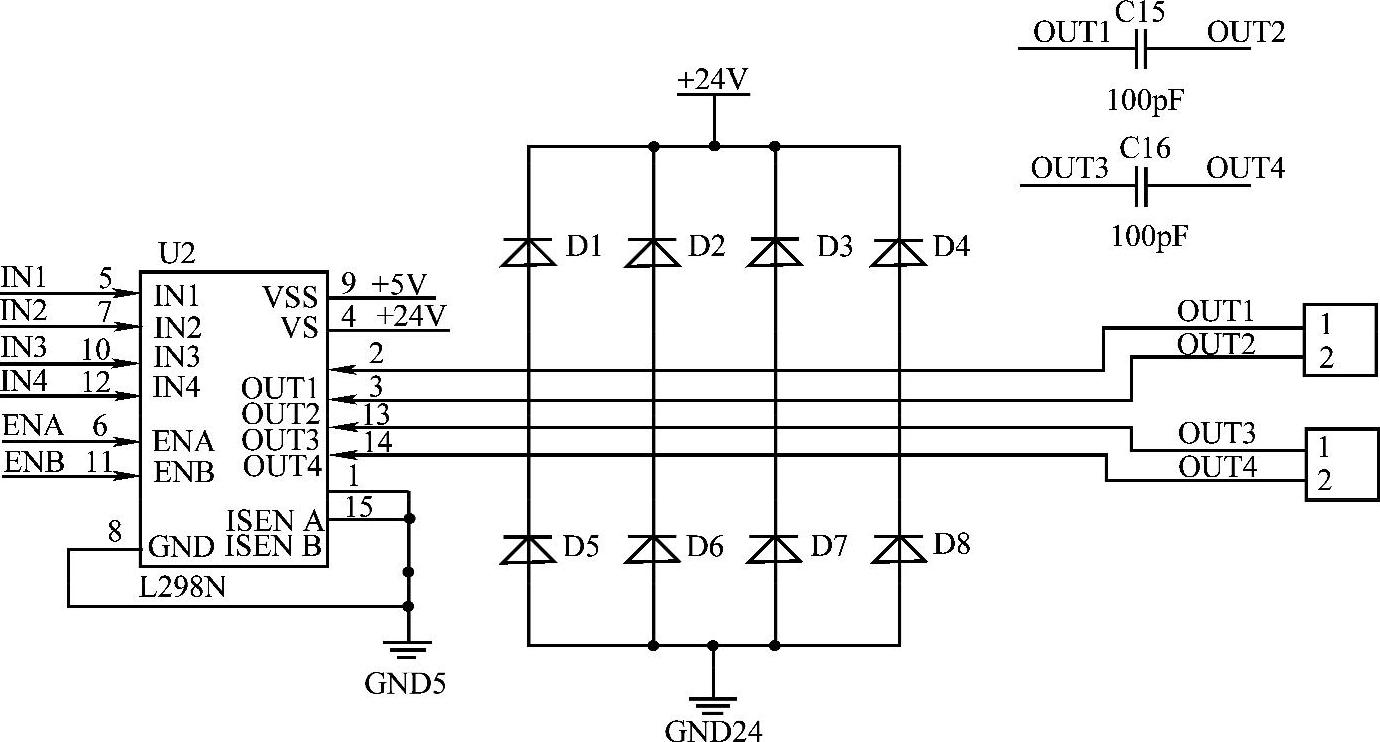
图8-49 电动机驱动电路图
为了实现更精确的控制,减少电动机运转对控制芯片的影响,需要实现主控制芯片STM32和L298N的物理隔离,使电动机的运转不影响控制芯片。采用在两者之间加入光耦隔离。经比较,选择TLP521作为隔离光耦,其电路图如图8-50所示。
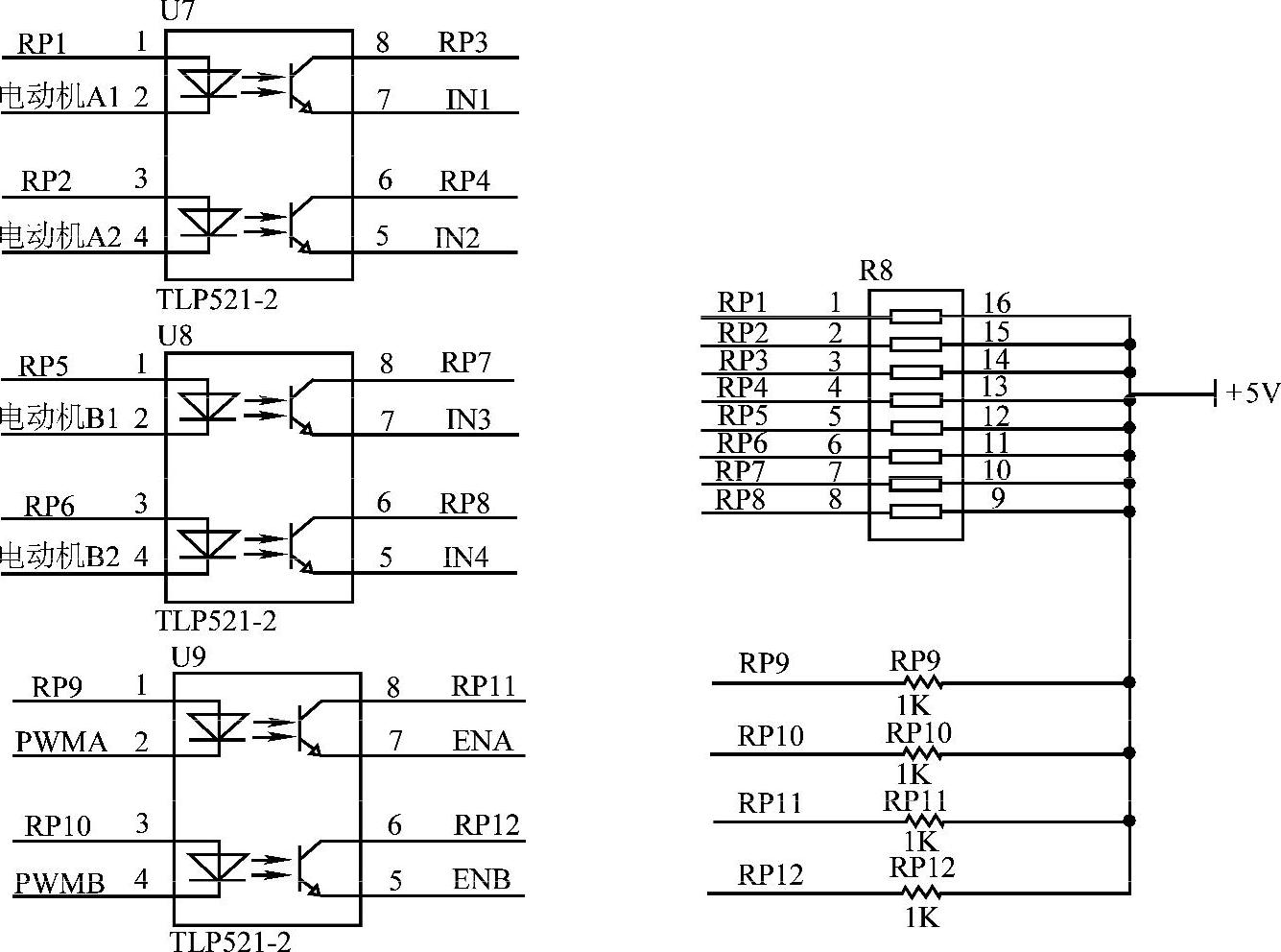
图8-50 光耦隔离电路图
4.通信模块
通信模块分为两大部分,一部分是千足虫宠物机器人自身的通信,另一部分是人机通信。(https://www.xing528.com)
(1)自身通信 千足虫宠物机器人自身的通信也主要由两部分构成,一部分是主电路板与分电路板之间的通信,主要实现主控制芯片对分控制芯片的同时操控,另一部分是分电路之间的前后相互通信,主要用来依次向后传递步态数据。
主芯片STM32提供的通信方式主要有以下几种:
1)I2C总线通信。STM32提供两个I2C总线接口,能够工作于主模式或从模式,支持标准和快速模式,支持7位或10位寻址,7位从模式时支持双从地址寻址,内置了硬件CRC发生器/校验器。可以使用DMA操作并支持SMBus总线2.0版/PMBus总线。
在速度方面,串行的8位双向数据传输位速率在标准模式下可达100Kb/s,快速模式下可达400Kb/s,高速模式下可达3.4Mb/s。
2)通用同步/异步收发器(USART)。STM32提供了3个串口接口。接口通信速率可达4.5Mb/s,其他接口的通信速率可达2.25Mb/s。USART接口具有硬件的CTS和RTS信号管理、支持IrDA SIR ENDEC传输编解码、兼容ISO7816智能卡并提供LIN主/从功能,且所有USART接口都可以使用DMA操作。
3)串行外设接口(SPI)。STM32提供2个SPI接口,在从模式或主模式下,全双工和半双工的通信速率可达18Mb/s。3位的预分频器可产生8种主模式频率,可配置成每帧8位或16位。硬件的CRC产生/校验支持基本的SD卡和MMC模式。所有的SPI接口都可以使用DMA操作。
4)其他。STM32还提供一个USB2.0全速接口和一个CAN2.0B主动接口,可以实现多种通信。
在比较了各总线的速度、实用性及管脚分布后,决定采用速度最快的SPI总线负责前后两体节间的快速通信,采用USART接口实现主控制板一对多的同时控制,即采用如图8-51所示的通信方式。
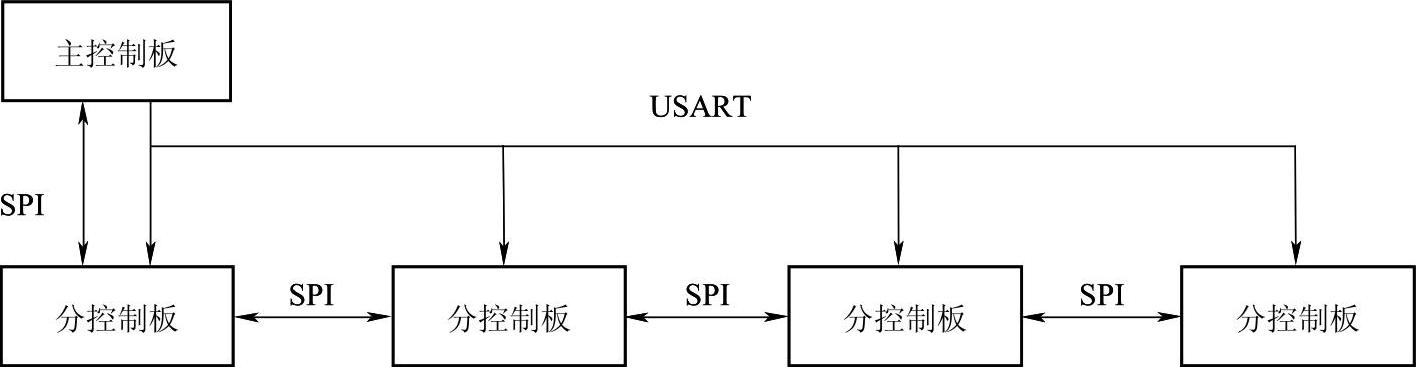
图8-51 通信方式
由于串口通信距离较长,为避免信号损耗,采用MAX485芯片作为串口通信处理芯片。MAX485接口芯片是Maxim公司的一种RS-485芯片。MAX485的驱动器可以实现最高2.5Mb/s的传输速率。这些收发器在驱动器禁用的空载或满载状态下,吸取的电源电流为120~500μA。所有器件都工作在5V单电源下。驱动器具有短路电流限制,并可以通过热关断电路将驱动器的输出置为高阻状态。接收器输入具有失效保护特性,当输入开路时,可以确保逻辑高电平输出,具有较高的抗干扰性能。串口通信电路图如图8-52所示。
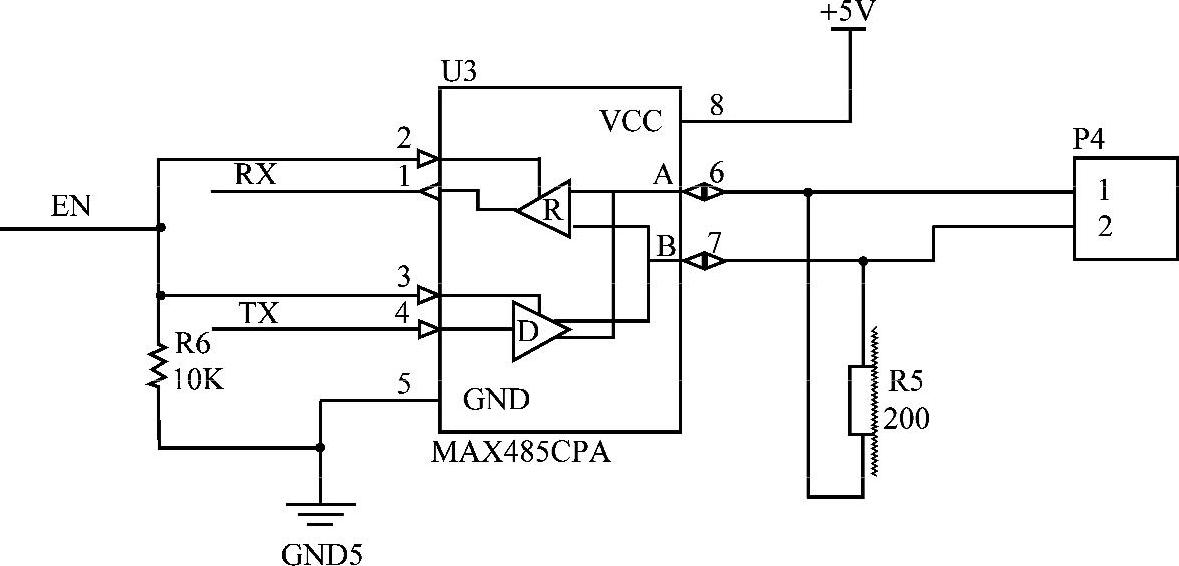
图8-52 串口通信电路图
(2)人机通信 人机通信主要用来实现操控者对千足虫宠物机器人的远程遥控,主要是遥控器与主芯片之间的通信。为了实现这一功能。采用NRF24L01无线芯片。NRF24L01是一款工作在2.4~2.5GHz世界通用ISM频段的单片无线收发器芯片。无线收发器包括:频率发生器、增强型SchockBurstTM模式控制器、功率放大器、晶体振荡器调制器和解调器。输出功率频道选择和协议的设置可以通过SPI接口进行设置。它具有极低的电流消耗,当工作在发射模式下发射功率为-6dBm时,电流消耗为9.0mA,接收模式时为12.3mA,掉电模式和待机模式下电流消耗更低。其电路原理图如图8-53所示。NRF24L01芯片通过SPI总线与主控制芯片相连接,将接收到的无线信号传递给主控制芯片,从而实现操控者对机器人的远程操控。
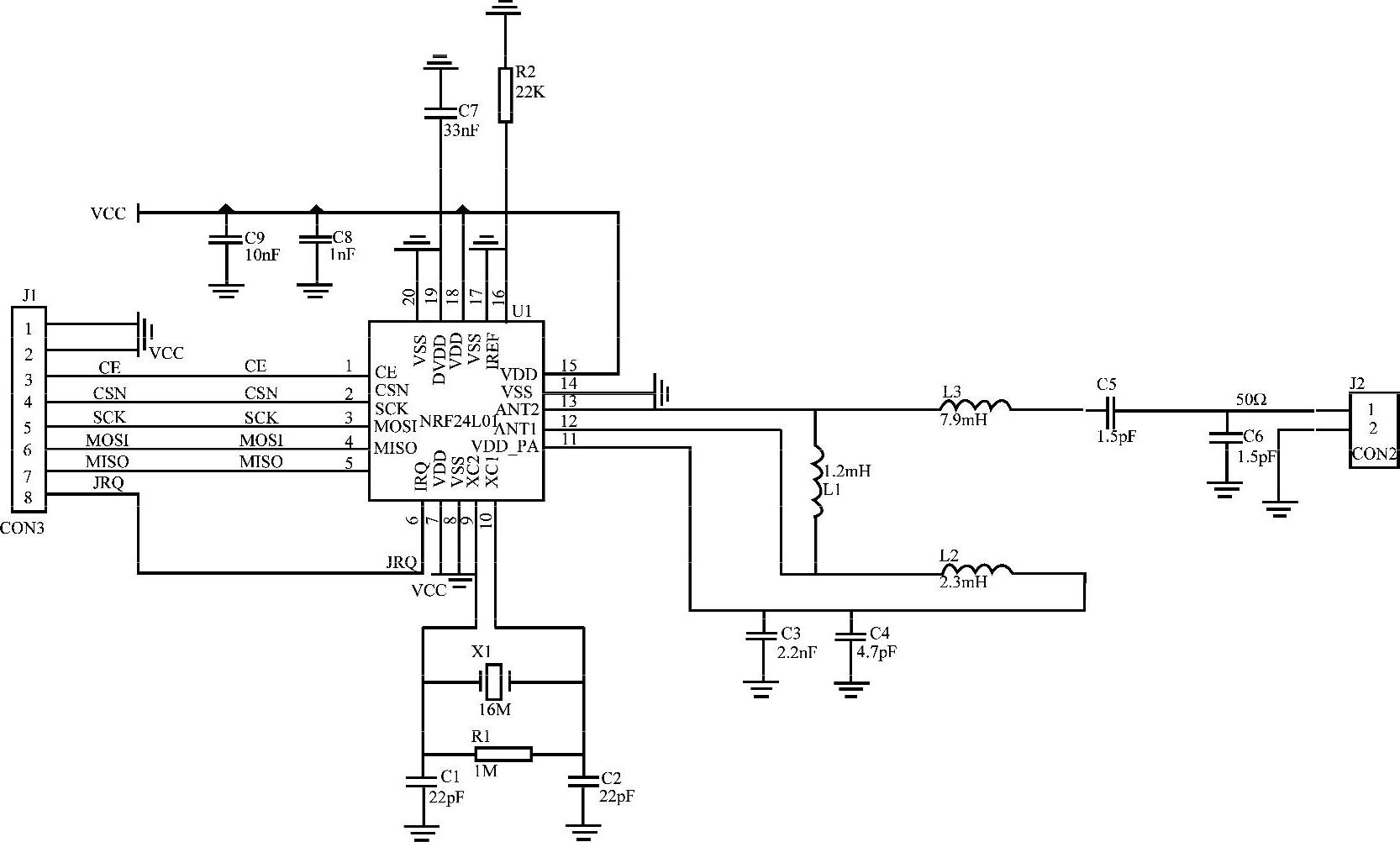
图8-53 人机通信电路图
5.传感检测模块
为了实现千足虫宠物机器人的智能化自动行走,需要给机器人安装一系列的传感器,感受外界信息,并反馈给主控芯片,使机器人能够依照外界条件自动调节自身行走状态。主要采用了以下几种传感器,用以获取外界环境数据。
(1)加速度传感器 选用飞思卡尔公司的MMA7455L作为三轴加速度传感器核心。MMA7455L是一款数字输出(I2C/SPI)、低功耗、紧凑型电容式微机械加速度计,具有信号调理、低通滤波器、温度补偿、自测、可配置通过中断引脚(INT1或INT2)检测0g及脉冲检测(用于快速运动检测)等功能。其电路图如图8-54所示。

图8-54 加速度传感器电路图
加速度传感器是根据压电效应的原理来工作的。通过计算产生电压与所施加的加速度之间的关系,就可以将加速度转化成电压输出,从而获得加速度数值。
(2)超声波传感器 选用HC—SR04作为超声波测距工具,如图8-55所示。它由超声波发射器、接收器与控制电路组成,可提供2~400cm的非接触式距离感测功能,测距精度可达3mm。通过I2C接口与主控制芯片相连。
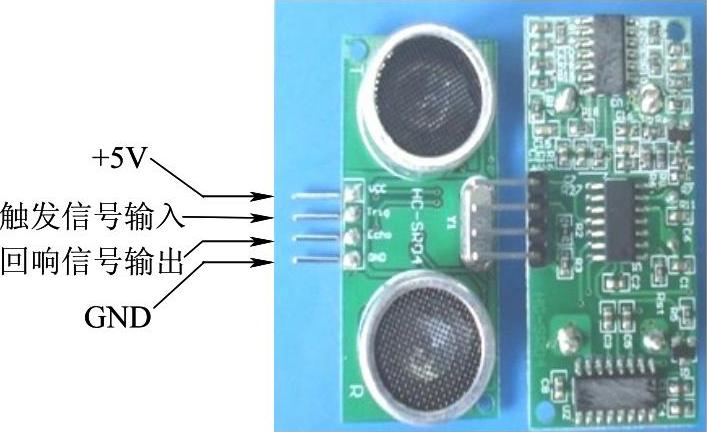
图8-55 超声波传感器
该传感器的基本工作原理是:采用I/O口TRIG触发测距,给出至少10μs的高电平信号;模块自动发送8个40kHz的方波,自动检测是否有信号返回;若有信号返回,通过I/O口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间;测试距离=(高电平时间×声速(340m/s))/2。
利用超声波传感器主要是为了测量机器人与家里物品的距离,预防其撞到墙或者其他物品,实现避障功能。
(3)摄像头模块 为了获取外界图像信息,增强机器人的互动性,在机器人上加装摄像头模块,如图8-56所示。其工作原理是:按一定的分辨率,以隔行扫描的方式采样图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度成一一对应关系的电压值,然后将此电压值通过视频信号端输出。

图8-56 摄像头模块
6.电动机执行模块
千足虫宠物机器人采用多关节多电动机驱动,其每一体节(包括腰)上有12个电动机,其中包括10个角位移伺服电动机和2个直流空心杯电动机。构成8足形式时,共有38个角位移伺服电动机和8个直流空心杯电动机。
为了提高电动机使用率,保证机器人正常运行。依据不同关节处所需关节力矩大小对电动机进行合理选型。根据需求情况,使用不同扭矩的电动机。电动机在机器人上的安装位置如图8-57所示。
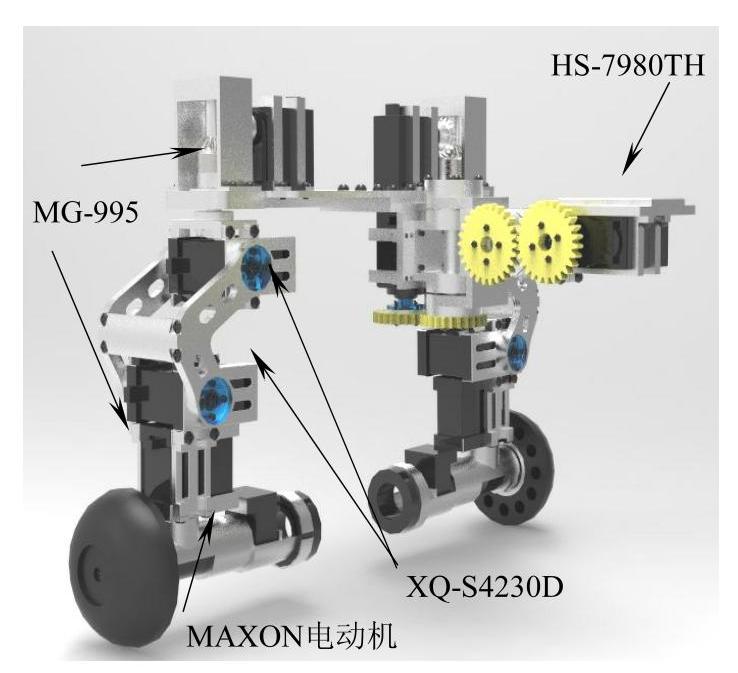
图8-57 电动机在机器人上的安装位置
在腿部Z轴方向转动部分,由于所需力矩不大,若动作合理,最大力矩小于100N·cm。采用辉盛MG995金属齿轮舵机伺服器提供动力,该舵机的相关参数见表8-4。
表8-4 辉盛MG995金属齿轮舵机伺服器参数表

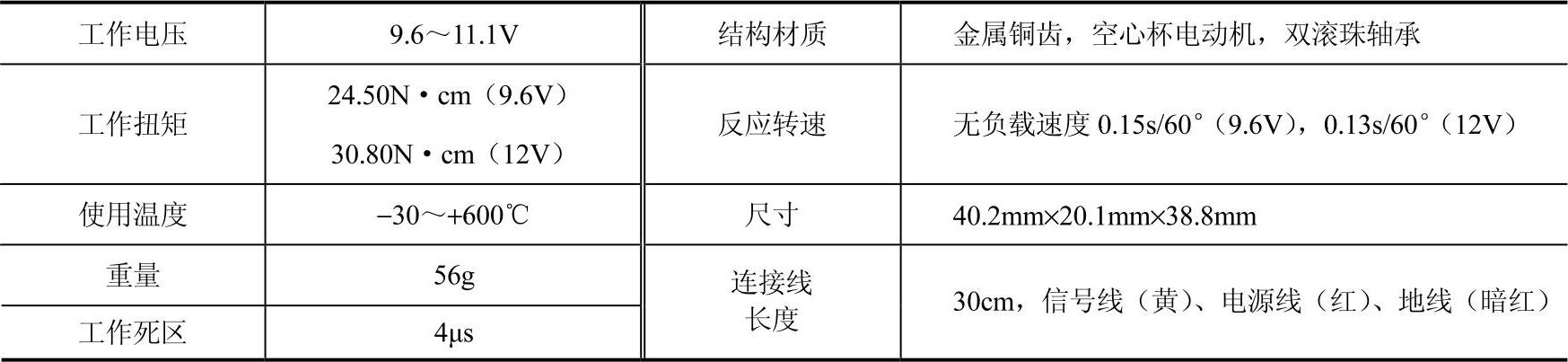
机器人腿部X轴方向的转动部分是承受机器人重力的主要部位。在某些步态过程中,该部分要承受高达250N·cm的扭矩。MG995的最大输出扭矩只有130N·cm,不足以提供相应的动力。于是选用XQ-power公司的XQ—S4230D金属齿轮舵机伺服器提供动力。在腰部左右方向转动部分,也采用了此款舵机。该舵机的相关参数见表8-5所示。
表8-5 XQ—S4230D金属齿轮舵机伺服器参数表
在腰部上下方向转动部分,由于要提起整个体节,所需扭矩最大。故选用扭矩更大的HITEC HS—7980TH舵机提供动力。其参数见表8-6。
表8-6 HS—7980TH金属齿轮舵机伺服器参数表

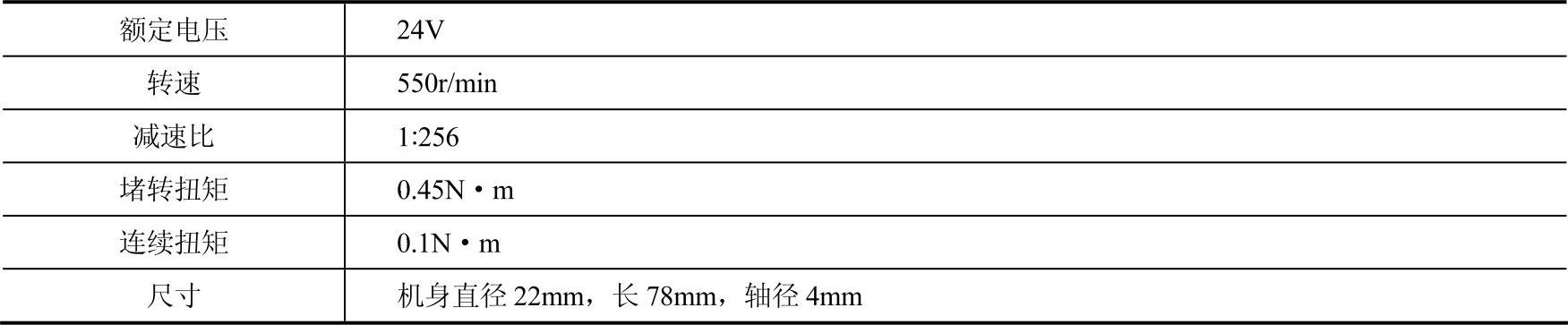
在足部轮式转动部分,选用MAXON直流有刷电动机。其主要特点是:体积小、重量轻、线性度好(无齿槽效应)、转动惯量小、反应迅速、过载能力强、效率高,并且具有良好的抗电磁干扰能力。
由于机器人对直流电动机的输出力矩有一定的要求,选择瑞士MAXON 22mm空心杯伺服减速电动机,如图8-58所示,相关参数见表8-7。该电动机带有集成编码器,可以直接检测返回速度信息。

图8-58 MAXON直流有刷电动机
表8-7 MAXON0 22-00.19-31器件参数
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。