



1.任务模式(Mission Profile)
机动性的分析首先与任务模式的制订密切相关,不同机动性级别的车辆任务模式也不同,或者说任务模式很大程度上体现了(或部分体现了)部队对车辆机动性的实际需求。
任务模式的核心是对任务过程的各阶段要素加以具体描述或给出明确的定义。车辆系统的任务模式就是针对车辆系统的任务特点,主要对系统的使用环境、使用条件和主要功能等要素进行具体描述或给出明确的定义。在车辆研制中任务模式的主要作用在于:它是制订战术技术指标的依据;也是对车辆进行性能预测和考核评价的依据。
美军在所制定的车辆系统研制要求中,都要明确地给出任务模式;任务模式的内容是在“一般说明”(包括适用范围、任务描述和引用文件)之后,在各项具体性能要求之前的位置。由此可以看出任务模式在整个研制要求中所占的重要地位。对整个研制要求来说,任务模式起到一种承上启下的作用。这里所谓的“上”是部队的需求,“下”是与车辆性能指标相关的各项具体要求。
为提出车辆系统的战术技术指标,首先应了解部队的需求;但是,调研得到的需求信息往往是分散的,经验性的,随时间而变化的,并主要侧重于任务层面。如果车辆装备是完成特定的任务还好办,如果车辆装备要完成的任务多种多样,使用的地域和条件也很广泛(如通用车辆),就会给战术技术指标的制订带来困难。为了将这些需求信息转化为完整的战术技术指标体系,就需要事先对任务做必要的综合、加工和提炼工作,同时还要考虑现有车辆系统的体系、技术水平、经济性等复杂因素,最终形成较明确的、可操作的任务内容。为了顺利完成这一过程,可以首先将那些影响任务成败以及对其他战技指标(主要是性能指标)具有决定性影响的内容(包括车辆的典型使用条件和主要参数指标)确定下来,并以此为基础,再对其他的战术技术指标及相关内容进行确定。美军将形成具体指标要求之前所形成的要求称为任务水平(mission level)的要求,这些要求就构成了任务模式的核心内容。
美军在20世纪50年代以前对车辆的研制一般都是就部队提出的某一具体任务直接提出相应的指标体系。50年代以后,由于部队对车辆的任务要求越来越多,车辆的品种数量也在急剧增加,开始意识到车辆指标体系论证工作的难度,并提出了任务模式的概念;起初由于受到“冷战”思维的影响以及技术的限制,所提任务模式的局限性较大,从而造成车辆的研制具有较大的盲目性;后来经过多年的调整和积累,对军用车辆在整个武器体系中作用的认识也更加清晰,研究工作逐步有了较大进展,到了80年代已经基本成熟,相关的规范和标准也制定出来。目前,现役的战术车辆的任务模式都是根据80年代以前的研究成果而制定的。90年代以来,由于世界军事格局发生了重大的变化,美军开始积极筹划所谓的“未来作战系统”。作为该系统的重要组成部分,车辆装备占有重要的地位,在对未来作战系统的战术车辆指标体系的论证过程中,所面临的问题也越来越多。例如车辆的使用条件、配套的武器要求、作战方式等都有新的变化和要求。为了减少新一代车辆研制失败的可能性,美军花大力气进行了车辆的论证工作,其中一项重要工作就是系统制定车辆的任务模式。
近期有关资料显示,美军一直在积极进行相关领域的研究,成果显著;目前通用车辆中的几个主力车型的任务模式制定工作已基本完成,并积累了大量的数据和经验,现已将研究重点集中在各种特种车辆和专用车辆方面。例如:2002年2月美国陆军工程部(U.S Army Corps of Engineers,USACE)和工程研究与发展中心(Engineer Research and Develop-ment Center,ERDC)向美国海军陆战队(USMC)提出对以两种中型战术车辆MTVR和MK48-14后勤车辆系统为基础,通过搭载多管火箭系统而构成的高机动火箭系统(HI-MAR)专门进行了任务模式研究,并进行对比分析。美国海军陆战队高机动火箭系统办公室批准了该项目,并提出:任务要包括世界范围的典型气候地区,并最终形成该系统的全球任务模式(Worldwide Mission Profile)。研究中通过多单位的参与,动用了多种先进的技术手段,最终确定了该系统的任务模式,并得出了一些重要的结论。从有关资料的介绍中可以部分了解美军的一些做法。
应该说,有关车辆系统任务模式所包含的内容并无严格的界定,对不同的车辆侧重点也不尽相同。例如以下为美军对未来重型通用战术货车所制定一个任务模式的内容。其中有关机动性部分摘录如下:
FTTS MSV车辆的战术机动性能限于在以下条件进行评价:60.9%的良好道路(铺装道路和沙砾道路)和39.1%的非良好道路(便道)和越野地面。越野地面包括岸滩、森林、草原、热带森林、山地和沙漠,并考虑所有季节条件。具体要求见表4-2。
表4-2 FTTS MSV任务要求

在该任务模式中,首先对车辆的战术机动性能的使用条件进行了定义和限定,明确给出了车辆将面临的不同道路(地面)种类和行驶比例,对不同的道路或地面分类给出了量化的指标,同时给出了车辆行驶道路比例的权重值和目标值。美军在该任务模式中还给出了质量参数(整备质量、最大总质量、装载质量等)的定义和要求、整车尺寸参数(总长、总宽和总高)的定义和要求以及环境适应性(工作温度范围、存储温度范围等)等的一些要求(这里未引用)。
表面上看,所涉及的机动性描述只是给出了不同道路(地面)的一些比例,从后面的分析可以看出,上述要求实际上有其内容丰富的战术背景;在该任务环境条件下,根据任务强度的不同,根据机动性分析进一步提出相应的行驶速度的要求。
我军20世纪80年代制订的越野汽车的行驶试验规程与美军的任务模式有其相似之处,二者在良好路面的权重都约为60%,坏路都约为40%。详情参见表4-2和表4-3。
表4-3 我军越野汽车12500km行驶试验规程

2.典型任务环境和战术任务水平
车辆在完成任务的过程中离不开一定的行驶环境(尤其是地面环境),因此确定典型行驶环境是制定任务模式的首要内容。美军将车辆行驶的地面分为主要道路(Primary Road)、次要道路(Secondary Road)、便道(Trails)和越野(Cross Country)四种,并给出了具体的定义,见表4-4。(https://www.xing528.com)
表4-4 美军车辆行驶地面的分类
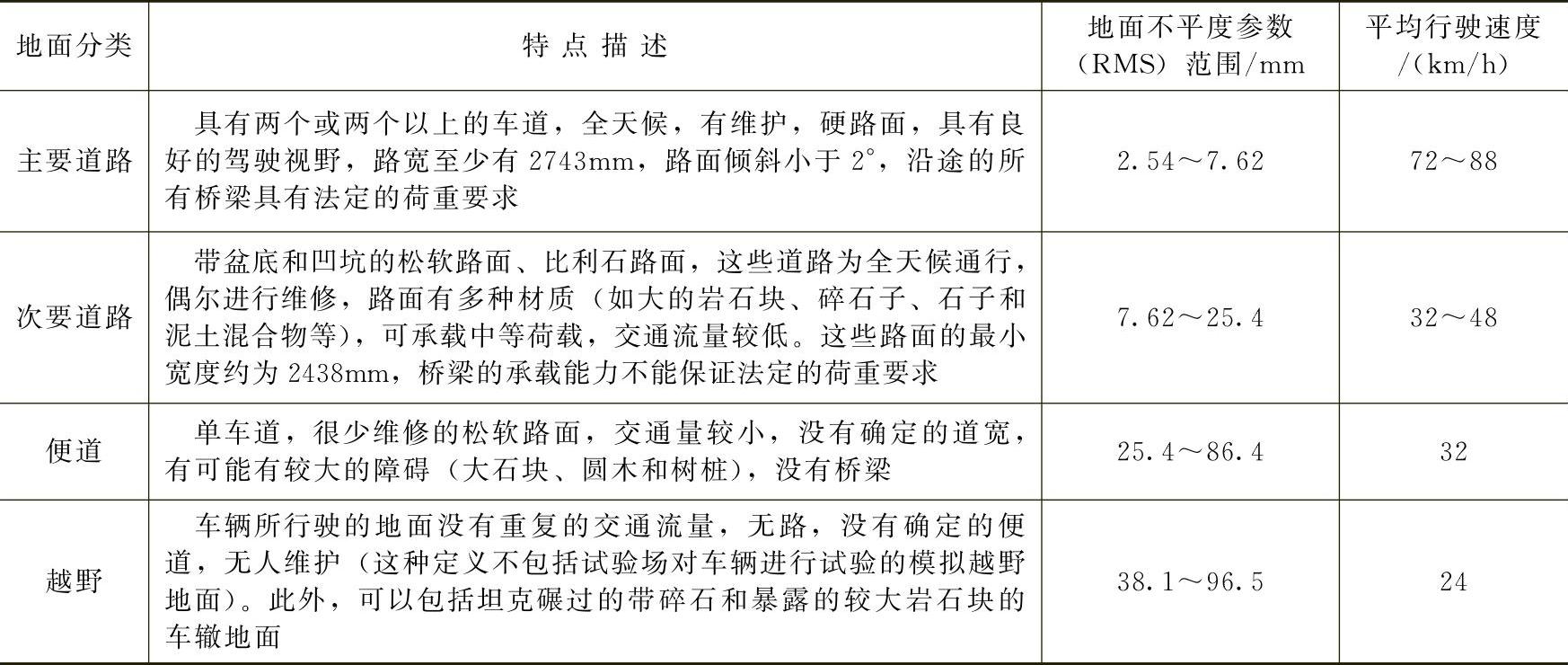
实际上美军在以上地面分类的基础上,还有更加具体的细分,这里就不一一列举。需要指出的是,气候环境对道路行驶性能的影响是不能忽略的,尤其是越野地面。美军将“干燥”(Dry)的地面定义为某地区一年中最干燥的30天的地面含水的条件;将“潮湿”(Wet)的地面定义为一年中最潮湿的30天的地面含水条件;将“正常”(Normal)的地面定义为雨后6h以后的地面含水条件;将湿滑(Slippery)的地面定义为12.7mm以上的降雨后6h以内的地面含水条件。
美军的军事任务涉及全球,由于全球各地的道路条件和气候条件差异较大,要想都考虑到,既不现实也没有必要(至少短时期内没有必要)。因此,美军从全球范围内有重点地筛选出若干个地区作为典型地区进行研究,并作为制定任务模式的依据。从战略角度考虑这些地区一定要是未来车辆有可能执行各种军事任务的地区,同时还要考虑获取数据和验证的方便性等因素。例如,将高机动火箭炮系统(HIMARS)的任务地区选定为欧洲、中东和亚洲中各一个地区,欧洲为德国的部分地区,处于欧洲中部;中东为伊拉克的部分地区,亚洲为朝鲜半岛。
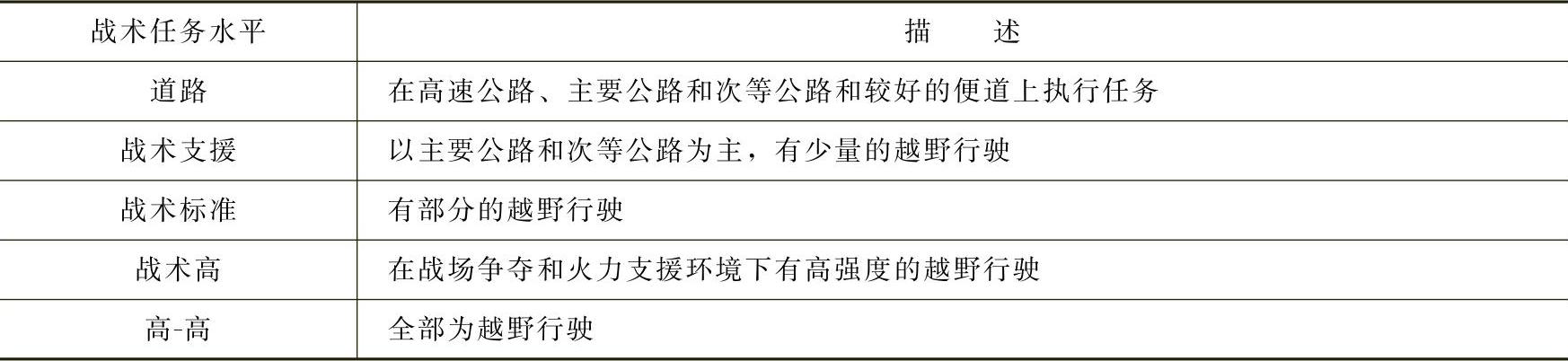
在以上地面分类的基础上,美军按在不同类型的地面上执行任务的比例不同进行了所谓战术任务水平(Mission Level)的划分和描述,见表4-5。表面上看,战术任务水平的划分和定义只是一个行驶条件的分类,但实际上它是任务模式建立的关键一步,后面的分析将会看到战术任务水平的制订具有较强的战略和战术背景和具体意义,任务水平的高低体现了车辆系统的任务“强度”;且与战术机动性等级和要求相对应。
表4-5 战术任务水平分级
3.需求分析和任务分解
这一阶段的工作,是要从部队的各种需求中进行高度的概括后得出不同的任务节点和分阶段的任务内容。
以高机动火箭系统(HIMARS)发射车为例;整个任务是从部队集结地(Corps Stor-age Area,CSA)到火箭发射点(Firing Point,FP),可以分解为从CSA到弹药运送点(Ammunition Transport Point,ATP)、从ATP到发射待命地域(Ammunition Holding Area,AHA)以及从AHA到FP三个阶段。可以看出这种空间节点的分解方法为路径选择和机动性分析做好了准备。
针对不同的任务可以有不同的分解。同一任务也可以根据分析的目的不同有不同的分解。例如以上的分解主要侧重于战场的战术机动性的预测,所以没有考虑铁路、飞机等的运输任务内容。有时需要对车辆的全寿命周期进行分析,则可以将存储、运输、展开等一并考虑。
4.环境信息收集和路径选择
环境信息收集和路径选择是确定机动性等级的重要步骤,目标任务地区确定后,就需要针对该地区收集相关的信息。如为了对车辆在给定地区的使用条件和环境进行分析,美军将调用其强大的地理资源信息源进行分析和前处理工作。美国陆军的工程研究与发展中心(ERDC)下属有一个遥感工程中心(Tele Engineering Operations Center,TEOC)负责将所有相关的地理信息进行收集和整理,并提供给分析人员。TEOC的一些工作包括数据收集、数据组织、数据与各种分析软件的接口以及将各种数据信息以可视化的形式显示等。提供的信息包括美国地理信息库(USGS)的地理数据、美国海洋大气管理局(NOAA)的地理和环境数据、全球数字高程模型(DEM)数据库、国家地图总署(NIMA)的数据产品,如数字化光栅图(ADRG)、网格化地面土壤数据(Interim Terrain Data,ITD)、向量网格化地面土壤数据(Vector Interim Terrain Data,VITD)地面特征基础数据(FFD)等。这些数据化信息为车辆的任务分析提供了有力支持。以上数据都以标准的形式进行存储和输出,以便于分析时随时调用。
例如在确定了某地区为研究对象后,NIMA可提供具有明确地理信息的地图。用图中的网格的覆盖部分表示“感兴趣”的地区并且可以提供详细的地面和环境信息;这些信息可以保证车辆任务模式分析的可靠性。
确定了地图中的区域后,下一步就是对车辆的任务路径进行选择。为了方便,路径的选择次序是首先确定终点(如FP)的位置和战术区域,然后反向选择各种补给的路线,并依次确定AHA、ATP和CSA点。由于软件计算量的限制,一般要将路径进行分段分析(一般不超过20~30km),这样就形成了多个线段连接的路线。如在德国境内选择了32条路线,在朝鲜境内选择了44条路线,在伊拉克境内选择了34条路线。在确定路线图的过程中,采用了一个专门研制的程序,即路径分析程序(Route Analysis Routine,RAR)。该程序的核心就是北约机动性预测模型(NRMM)和一个路径评价和优化程序。该程序可以对车辆的地面机动性进行分析,确定最佳(最快速度)的路线。RAR可以在每一7m宽的路径走廊上自动找出最佳的路线;为了便于分析,RAR是交互式的,用户可以对一些要素进行选择,如道路的类型,另外可以对河流进行判断,以决定是穿过、越过(桥梁)还是绕过。对每一条路线,RAR都可以输出表4-6所示的信息。其中RTE代表被评价的路线序号;VEH为车辆型号;COND为气候条件;GAP TYPE为土壤限制的类型;STATUS为任务是否完成,任务完成用C字母表示,不能完成用F字母表示;此外还给出了各种类型地面上的行驶时间(TIME)和距离(DIST)。从RAR结果可以得到各种道路的行驶比例,该比例是评价任务强度指标(Mission Severity Rating,MSR)的重要依据。
表4-6 路径分析程序(RAR)信息

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。