



目前汽车制造商正在开发一些新型的BBW AWB制动机电一体化控制系统,这些系统将不同级别的机电一体化集成到制动系统中来产生诸多的优点。通过卓越的机电一体化制动器工程,有些汽车制造商正在快速地提升传统的流体-机械制动(FMB)或气动-机械制动(PMB)系统至一个电子-机械制动器(EMB)系统的技术潜力。EMB系统可以完全电动地工作。随着将机电一体化集成到底盘运动的解决方案的实现,制造商正在开发前沿的技术。这些技术将给客户带来巨大的好处。
最近,汽车制动器制造商都在致力于全时防抱死和/或防滑BBW AWB制动机电一体化控制系统的工作【NEWCOMB AND SPUR 1967;ERVIN AND WINKLER 1986;WELLS AND MILLER 1993;FIJALKOWSKI & KROSNICKI 1994;FI-JALKOWSKI 1995;BALZ ET AL. 1996;CHEW 1996;SCARLETT 1996】。
大约70年以来,汽车制动器一直使用流体或空气压力,它的一个缺点是(如同美国人说的)将部件安装在发动机舱盖(bonnet or hood)下面有困难。ABW BBW可能首先以一个混合动力的形式出现,这样保留了一些流体(液压或气动)装置。现在它可以是机电一体化的。
随着汽车技术的提高,越来越多的M-M系统正被机电一体化所取代。比如,在车底汽车系统中,平常的缓冲装置和支撑杆已经被机电一体化的减振器所取代。计算机控制的空气弹簧悬架已经取代了螺旋弹簧。至今,大多数的这些改变只限于高端舒适或性能车。这是为什么呢?当然成本是一个因素,另一个原因是可靠性【CARLEY 2004】。
机电一体化给很多汽车控制领域可以带来大幅的提高,但前提是创新的系统没有任何问题并且可靠的,但情况并不总是这样。制动踏板随一台通知四个快速动作射流阀的计算机而工作,而计算机要准确地使每个车轮上的制动器运行是相当困难的。只有当一个不利问题或电气故障出现时,备份主F-M或P-M缸才会开始活动。
一个传统的电子-机械-流体(E-M-F)泵或电子-机械-气动(E-M-P)压缩机和一个高压油液或空气(气体)储存器(或蓄能器),在每个轮上提供“永久工作的”(permanently-on)全制动压力。面向计算机的调制射流阀控制流体或空气压力真正激活每个车轮上的制动器。在创新系统中,特大号的真空制动助力器现在已经过时了。
EFMB、EPMB和EMB是代表未来制动技术的三个BBW AWB制动机电一体化控制系统。EFMB或EPMB是第一个应用,并使用目前“湿的”流体系统的元件。EMB是一个“干的”电气系统,消除了传统FMB或PMB系统所依赖的流体管线和制动液或制动气。
EFMB或EPMB使用一个机电一体化驱动单元。这一机电一体化驱动单元带踏板感觉模拟器和检测驾驶人意图的传感器。该驱动单元和其他传感器的信号通过电线传输至一个ECU。与F-M(H-M和/或P-M)单元一起,该ECU以与目前制动器相同的方式在传统的车轮制动器上应用最优的制动油液或空气(其他)压力。相反地,EMB利用由ECU控制的线性或旋转式E-M电动机,直接在车轮制动钳中产生制动压力。这一系统也利用一个PFS和传感器来解释驾驶人的意图。ECU给每个车轮发送信号,在每个车轮中有一个E-M电动机应用合适的制动液或压力。这种系统不需要任何流体管线,因此也就不需要制动油液或空气(气体)。优于传统系统的一个主要优势是,EFMB、EPMB和EMB是根据需要独立对车轮施加压力,优化了制动系统【CONTINENTAL TEVES INC. 2003】。
全部系统也有几个设计和安全方面的革命性的优势。EFMB、EPMB和EMB具有如下的优势:更短的制动和停车距离;提高的耐撞性;达到更好组装和更容易装配目的的减少的质量、尺寸和零件数量;当ABS激活时踏板振动的消除;与未来交通诱导系统交互的能力。另一个关键优点是集成了其他机电一体化技术,如ABS、TCS、ESP和VSC等。这些系统用相同的ECU工作并使用相同的电子信号,从而根除了在已有系统上对附件零件的需要。
目前汽车科学家和工程师正在使用人工智能(AI)工具来设计创新的BBW AWB制动机电一体化控制系统,以加速研究和开发工作。
汽车制造商将引入创新和非常先进的RBW或XBW整体式一体成型车身、space-chassis、平板滑板式底盘或body-over-chassis机电一体化控制超系统,以能消除车辆的加速踏板和制动踏板【SKF 2002】。
EFMB、EPMB或EMB BBW AWB制动技术能够取代制动踏板。转向、制动、换档和离合器,全部使用最新概念车中的RBW或XBW整体式一体成型车身、space-chassis、平板滑板式底盘或body-over-chassis机电一体化控制技术。
每个系统的核心是一个在智能机电一体化控制下的智能E-M传动装置。从驾驶人的控制单元来的信号由一个逻辑系统解释,这保证每个DBW AWD驱动、BBW AWB制动、AWB AWA悬架或SBW AWS转向机电一体化控制系统的合适的行为【SKF 2002】。
驾驶人控制单元融合了来自今天的行之有效的人机接口(MMI)的熟悉设计元素。这些设计元素结合了RBW或XBW操作优点。由此而来的机电一体化控制布置省掉了驾驶杆及加速和制动踏板,从而为汽车设计人员带来追求非传统内饰的空前自由。机械连接的左右转向控制杆的特点是大约20°的全行程。到前轮运动的映射处于全机电一体化的控制之下,并通过一个适当的高转矩E-M电动机,将根据作用在转向齿条上的负荷提供反馈给驾驶人。驾驶人体验到的“感觉”的水平是完全可编程的。同样地,前轮的运动之间的关系也是如此。制动系统控制在驾驶人控制单元的左右控制杆是重复的,并且通过挤压手柄操纵。控制杆的机械设计采用了渐进式阻力,在运动起始的一个小的,但可辨认的空隙提供在制动器开始工作时的触觉指示。系统控制每个制动器,如同整个制动EFMB、EPMB或EMB BBW AWB制动机电一体化控制系统的一个大型(umbrella)机电一体化控制布置下的一个单个子系统一样【SKF 2002】。
图3-3所示为一种简单的BBW AWB制动机电一体化控制系统。它说明在一个分布式实时应用中成员视图一致性的重要性【KOPETZ AND BAUER 2002】。
在这一应用中,四个节点通过一个容错(FT)通信系统连接。这四个节点控制汽车四个车轮处的制动器。
右前(R-Font)和左后(F-Back)节点从一个故障沉默(fail-silent)制动踏板传感器接收制动踏板液压或气压;左前(L-Front)和右后(R-Back)节点从另一个故障沉默制动踏板传感器接收制动踏板液压或气压。(https://www.xing528.com)
每个轮节点通知所有其他节点有关其制动踏板传感器的信息,执行一个分布式算法来分配每个车轮的制动力,并在该轮控制制动器。
制动器假定设计成一个自主包含一个已定义状态的形式,比如,在轮节点崩溃或电能或机械装置失效的情况下的“车轮空转—没有制动力作用”。
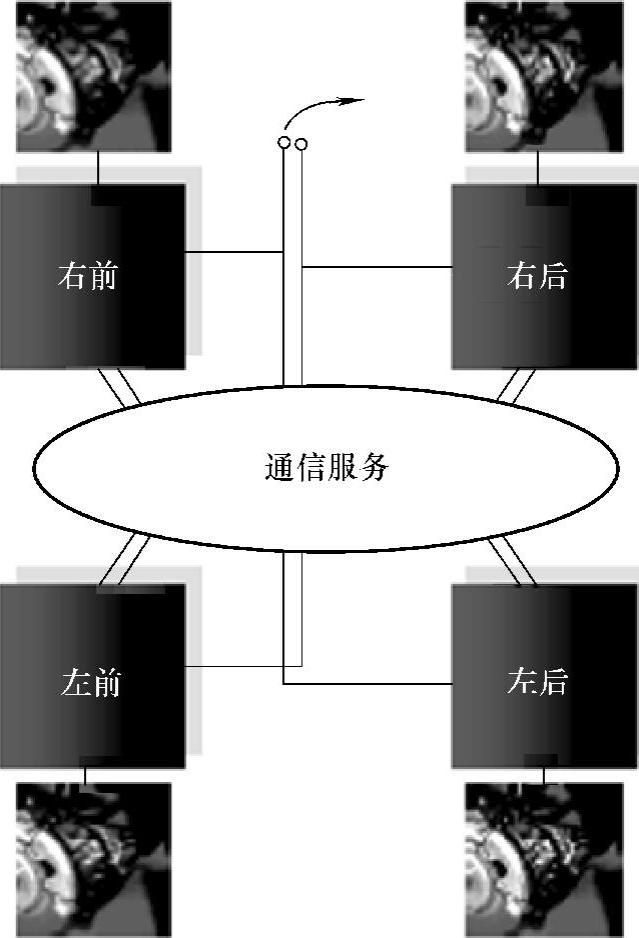
图3-3 简单的BBWAWB制动应用【KOPETZ AND BAUER 2002】
一旦其他三个车轮了解到某个车轮处的故障,则它们重新分配到另外车轮的制动力,以便车辆有三个制动轮安全停车。
制动失效瞬间和制动力重新分配瞬间的时间间隔,也就是错误检测的时间间隔,是一个安全关键参数。在该错误检测间隔期间,制动BBW AWB制动机电一体化控制系统处于不一致状态。
有推测说,如果这个不一致状态没有在(至多)几个采样周期之内被发现和修正,则会有发生致命事故的潜在可能【KOPETZ AND BAUER 2002】。
考虑一下在右后节点有一个外向链路失效的场景。在这个场景中,另外三个节点可能假设右后节点已经失效(因为它们没有收到来自右后节点的任何消息),但右后节点可能认为它在正常运行,因为它收到来自其他节点的全部消息。
这个场景说明,在一个分布式实时系统中需要一个分布式成员协议来发现并消除安全相关不一致。
如果违背了时间触发架构(TTA)的故障假设,并且分布式一致性协议不能达成一个一致的结论,则TTA激活它的“防小团体”(clique avoidance)算法来将严重的状况告知应用。
在这种情况下,由应用来决定该如何进行:尽快通知快速重启来重建一致性(比如,一个巨大的瞬变被假定为问题的产生原因),或者继续用不一致的数据(这是不推荐的)。
图3-4所示为BBW AWB制动机电一体化控制系统,可以在六个可编程机电一体化节点的网络上实现。这些节点使用一个时间触发通信协议/C类(TTP/C)通信【HEINER AND THURNER 1998;KOPETZ ET AL. 1998】。
其中两个制动踏板节点的物理位置靠近制动踏板。它们的作用是在两个复制总线上持续读取并广播制动需求。
在接收端有四个轮节点。通过处理这一制动需求信息和来自轮载荷、旋转加速度和油液或空气(气体)压力传感器的传感反馈,每个节点计算制动液或空气压力值,计算所得压力会被送到一个执行机构,然后在车辆的相应的车轮上应用实际的制动液或空气压力。整个系统有许多复杂的制动功能,包括:依每个车轮的载荷成比例的制动;ABS和ESP功能【HEINER AND THURNER 1985】。
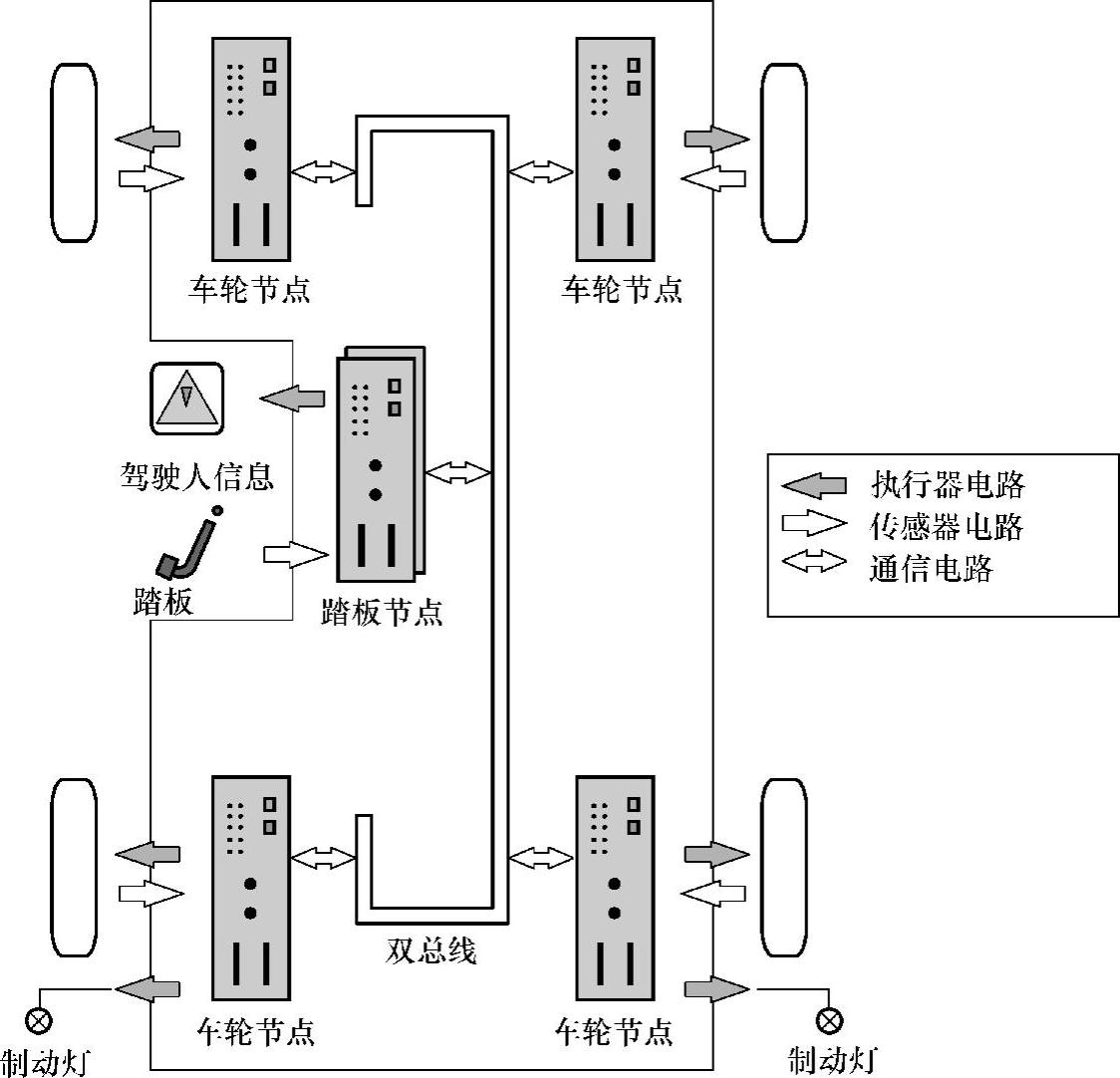
图3-4 BBW AWB制动机电一体化控制系统的体系结构 【HEINER AND THURNER 1985】
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。