



【摘要】:FRSM方法是在未知极限状态函数时考虑状态模糊的情况下进行可靠性分析的一种近似方法。图4-5 模糊响应面示意图在图4-5中,g表示真实响应面;gL、gλ、gU表示模糊响应面;DL*、Dλ*、DU*表示模糊设计点。对应于清晰的安全界限g=0的设计点和可靠度指标以一定隶属度与D1*和D3*、βL和βU相关。
FRSM方法是在未知极限状态函数时考虑状态模糊的情况下进行可靠性分析的一种近似方法。考虑状态模糊性,根据式(4-87)和式(4-88),可以将式(4-86)表示的模糊极限状态函数转化为区间函数,即
gλ(t)=[gL(t),gU(t)] (4-92)
这样就将一个模糊响应面由两个确定的响应面表达,如图4-5所示。
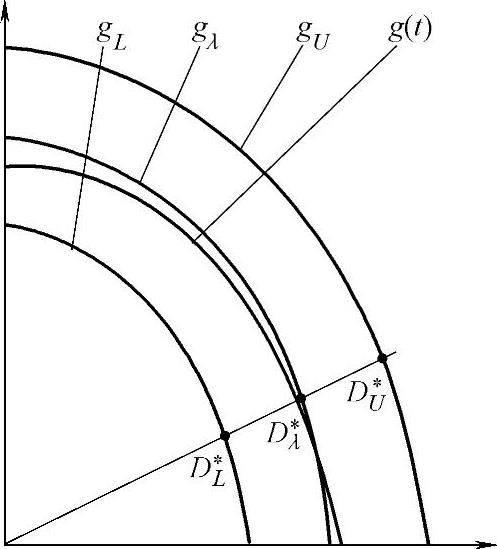
图4-5 模糊响应面示意图
在图4-5中,g(t)表示真实响应面;gL、gλ、gU表示模糊响应面;DL*、Dλ*、DU*表示模糊设计点。
柔性机构的模糊响应面可以通过FOSM、AFOSM和ANN-RSM方法分别求出两个确定响应面对应的设计点以及可靠度指标βL和βU,则
βλ=[βL,βU] (4-93)(https://www.xing528.com)
由于将极限状态函数由模糊响应面表示,柔性机构动态响应清晰的失效与安全界限已经不存在,那么确定的设计点也是不存在的。对应于清晰的安全界限g(t)=0的设计点和可靠度指标以一定隶属度与D1*和D3*、βL和βU相关。
根据模糊数学的分解定理[60],利用λ水平截集方法,当λ取遍[0,1]区间的所有值时,可以求出可靠度指标βs,即

确定λ的值使得g(t)=0,则可以计算出对应的设计点和可靠度指标βs。
通常情况下,一般λ不会取遍整个[0,1]区间,参考文献[205]采用重要度抽样方法确定λ值,参考文献[201]采用多项式拟合方法求解λ值,即
μ(x)=(ax2+bx+c)exp(-λx) (4-95)
式中,a、b、c为待定系数,根据具体情况通过已知数据确定。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。