



前向仿真的数据流方向与车辆实际运行中的功率流方向相同,由驾驶员模型依据仿真所得实时速度以及道路循环工况需求车速的偏差来实时调整加速或制动踏板开度,输出相应的加速和制动命令,从而使得控制器能够按照驾驶员的行驶意图(即驾驶员通过对道路与车况条件的判断,提出的关于需求车速、爬坡度、起步/停车等车辆状态的参量)进行整车能量管理与分配。在仿真过程中,驾驶员对踏板的调节通常是以转矩的形式体现出来。控制器按照驾驶员需求计算出驱动装置应提供的转矩或功率,并决定相关部件的工作状态,然后以控制指令的形式直接传送到相应部件,从而实现对整车的控制。当实际车速低于预期车速时,驾驶员输出加速命令并传递给控制策略模块以请求较高的驱动转矩,由控制策略模块控制协调发动机模块和电动机模块产生合适的驱动转矩,并通过驱动系统向车轮模块及整车模块传递,使整车加速到实际车速与期望车速一致[2]。前向仿真示意图如图4-1所示。
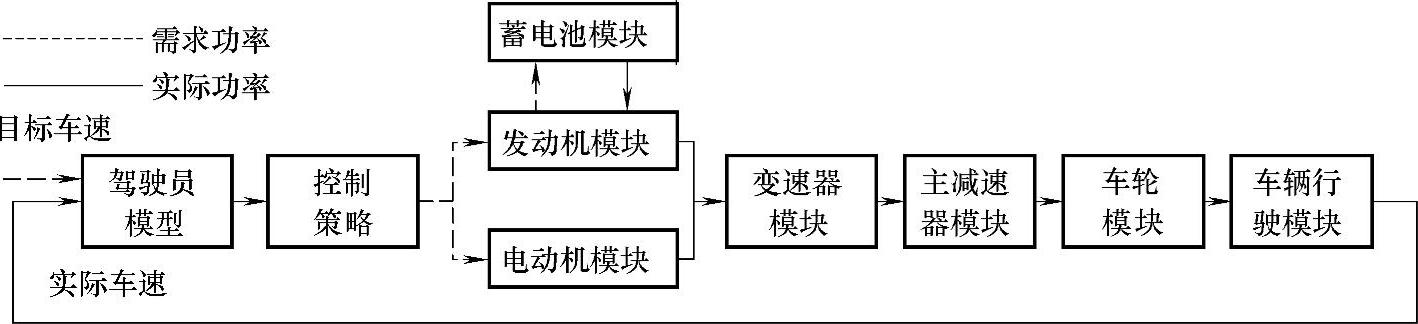
图4-1 前向仿真示意图(https://www.xing528.com)
前向仿真结构对部件的各种参数采取与实际驱动过程相类似的处理方法,如控制信号的生成与传递方式以及部件间传递其实际所能提供的转矩、转速等。因此,整车控制器可以在这种仿真结构中得以高效的开发和测试,直至满足设计要求。由于其结构上的优势,使得在前向仿真结构中考虑包括离合器和变速器等非线性环节在内的动力系统的动态反应过程成为可能。另外,在前向仿真结构中进行整车动力性的计算也相对较为容易,只需将加速踏板开度值设定为最大即可,仿真计算精确度较高,仿真效果比较理想。但由于前向仿真结构中涉及仿真所得车速(首先根据传动系输出的驱动力与整车静态质量、动态质量之和的比值计算出加速度,再由加速度积分得到)以及相关传动部件的动态变化过程的计算,因而对积分运算提出了较高要求。为了提高仿真的精确度与准确度,通常需要采用高阶的解算方法进行积分运算(如龙格-库塔四阶公式法),其所对应的仿真步长就应选取得较小(一般为0.01s),故仿真速度较慢。尤其当循环工况时间大于10min时,这一不足点就表现得尤为强烈。同时由于仿真步长的减小,使得在设定的同等长度仿真时间段内,所需保存的仿真过程中间数据量大大增加,这对计算机的存储能力也提出了更高的要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。