



1.任务
设计并制作一套简易旋转倒立摆及其控制装置。旋转倒立摆的结构如图17-4所示。电动机A固定在支架B上,通过转轴F驱动旋转臂C旋转,摆杆E旋转。摆杆E通过转轴D固定在旋转臂C的一端,当旋转臂C在电动机A驱动下作往复旋转运动时,带动摆杆E在垂直于旋转臂C的平面作自由旋转。
2.要求
(1)基本要求
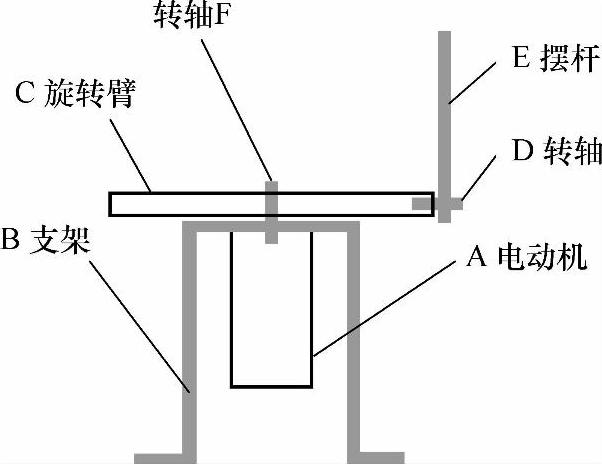
图17-4 旋转倒立摆结构示意图
1)摆杆从处于自然下垂状态(摆角0°)开始,驱动电动机带动旋转臂作往复旋转使摆杆摆动,并尽快使摆角达到或超过-60°~60°。
2)从摆杆处于自然下垂状态开始,尽快增大摆杆的摆动幅度,直至完成圆周运动。
3)在摆杆处于自然下垂状态下,外力拉起摆杆至接近165°位置,外力撤除同时,启动控制旋转臂使摆杆保持倒立状态时间不少于5s;期间旋转臂的转动角度不大于90°。
(2)发挥部分
1)从摆杆处于自然下垂状态开始,控制旋转臂作往复旋转运动,尽快使摆杆摆起倒立,保持倒立状态时间不少于10s。
2)在摆杆保持倒立状态下,施加干扰后摆杆能继续保持倒立或2s内恢复倒立状态。
3)在摆杆保持倒立状态的前提下,旋转臂作圆周运动,并尽快使单方向转过角度达到或超过360°。
4)其他。
3.说明(https://www.xing528.com)
1)旋转倒立摆机械部分必须自制,结构要求如下:硬质摆杆E通过转轴D连接在旋转臂C边缘,且距旋转臂C轴心距离为(20±5)cm;摆杆的横截面为圆形或正方形,直径或边长不超过1cm,长度在(15±5)cm范围内;允许使用传感器检测摆杆的状态,但不得影响摆杆的转动灵活性;图17-4中支架B的形状仅作参考,其余未作规定的可自行设计结构;电动机自行选型。
2)摆杆要能够在垂直平面灵活旋转,检验方法为:将摆杆拉起至水平位置后松开,摆杆至少能够自由摆动3个来回。
3)除电动机A之外,装置中不得有其他动力部件。
4)摆杆自然下垂状态是指摆角为0°位置,见图17-5。
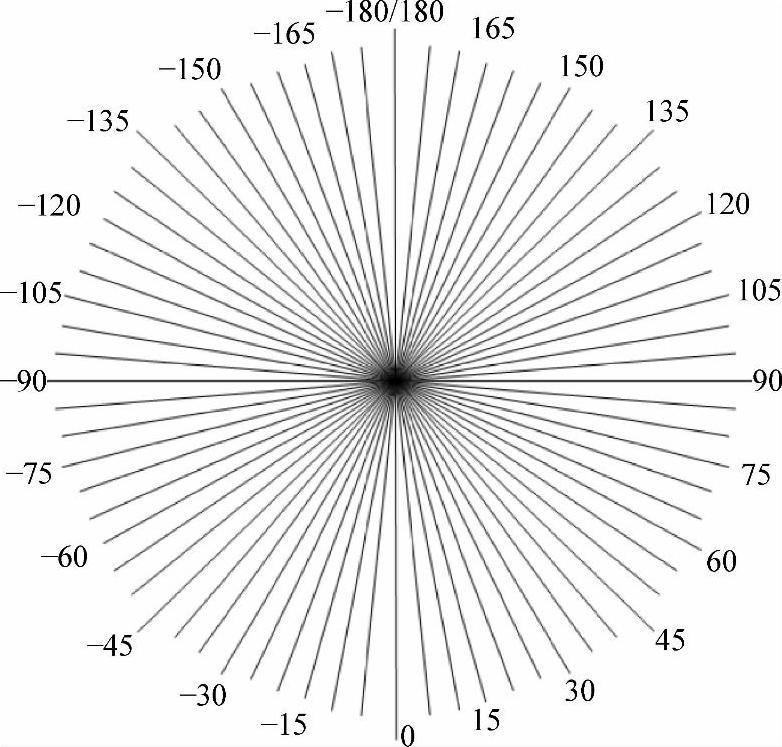
图17-5 摆杆位置示意图
5)摆杆倒立状态是指摆杆在-165°至165°范围内。
6)基本要求(1)、(2)中,超过30s视为失败;发挥部分(1)超过90s视为失败;发挥部分(3)超过3分钟即视为失败;以上各项,完成时间越短越好。
7)摆杆倒立时施加干扰的方法是,以15cm长细绳栓一只5克砝码,在摆杆上方将砝码拉起15°~45°,释放后用砝码沿摆杆摆动的切线方向撞击摆杆上端1~2cm处;以抗扰动能力强弱判定成绩。
8)测试时,将在摆杆后1~2cm处固定一如图17-5所示轻质量角器,以方便观察摆杆的旋转角度。
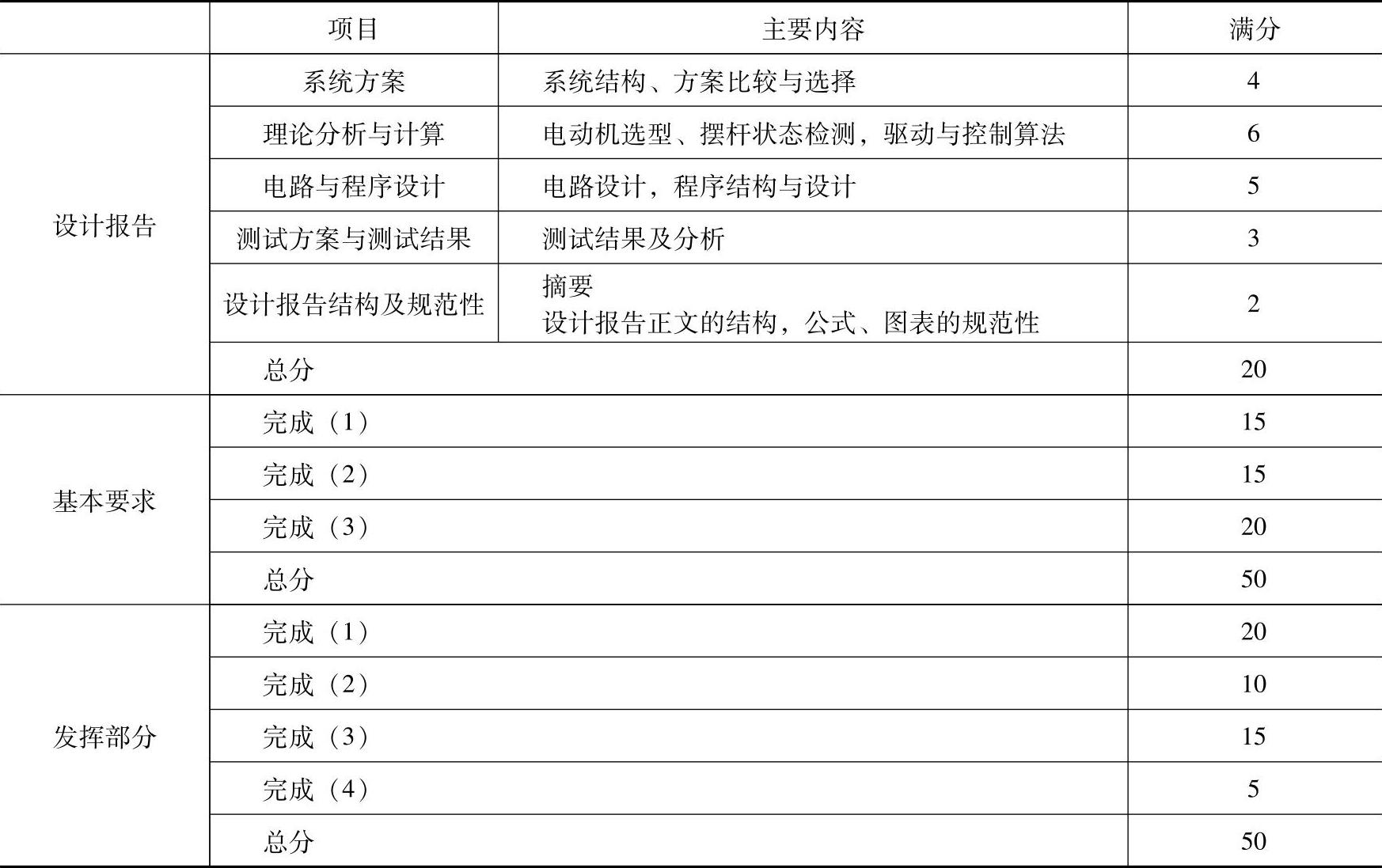
4.评分标准
表17-4 给出了简易旋转倒立摆及控制装置项目的评分标准。
表17-4 简易旋转倒立摆及控制装置评分标准
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。