



1.任务
设计并制作一套电磁控制运动装置,该装置由电磁控制装置、摆杆等部分构成。装置外形尺寸要求不能大于:长300mm、宽300mm、高300mm,摆杆支撑轴中心点到摆杆底端的长度规定在100~150mm范围内装置结构示意图如图17-14a、b所示。
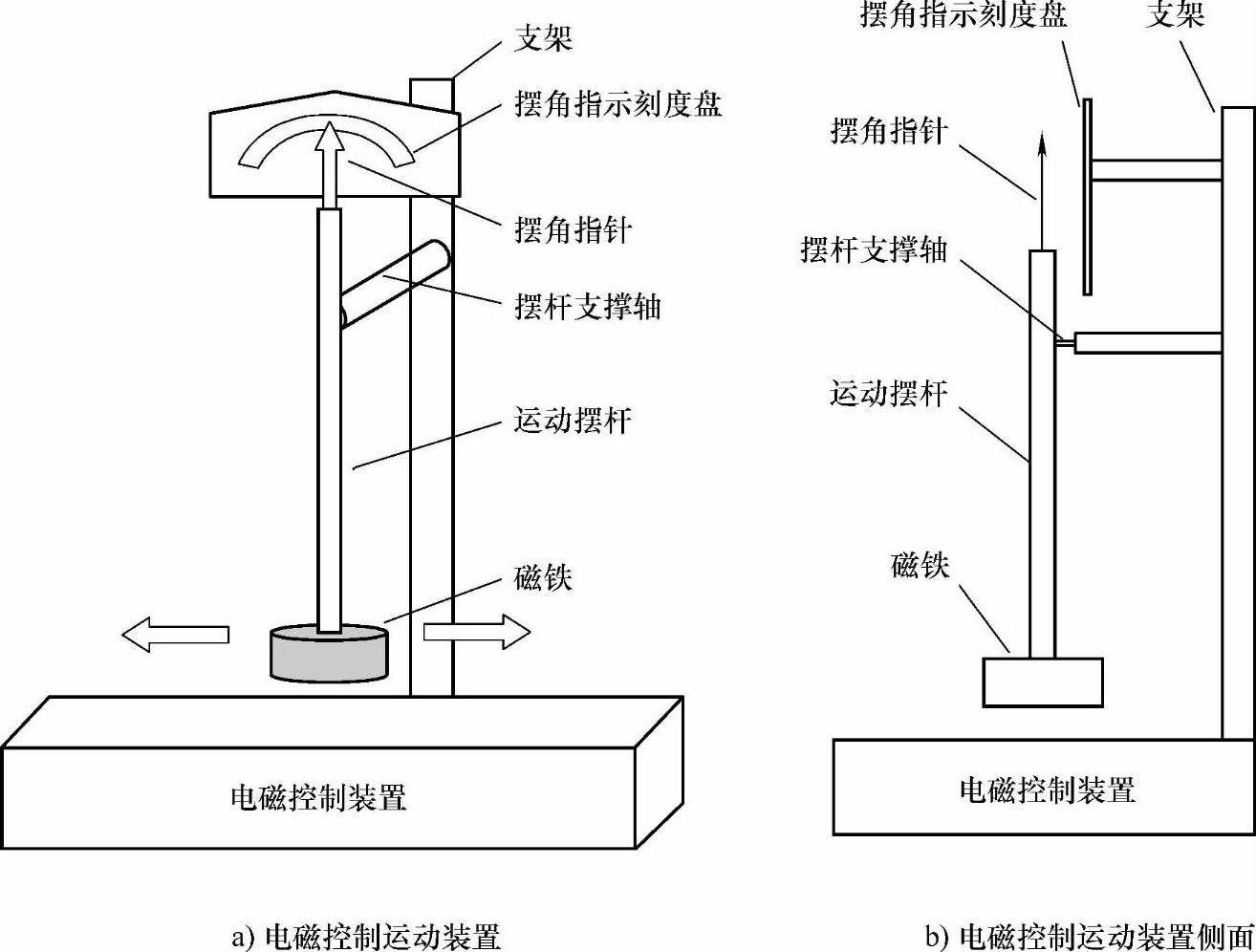
图17-14 电磁控制运动装置示意图
2.要求
(1)基本要求
1)按下起动按钮,由静止点开始,控制摆杆摆动。
2)由静止点开始,控制摆杆在指定的摆角(10°~45°范围内)连续摆动,摆动摆角绝对误差≤5°,响应时间≤15s。
3)由静止点开始,按指定周期(0.5~2s范围内)控制摆杆连续摆动,摆动周期绝对误差值≤0.2s,响应时间≤15s。
4)在摆杆连续摆动的情况下,按下停止按钮,控制摆杆平稳地停在静止点上,停止时间≤10s。
(2)发挥部分
1)摆杆摆角幅度能在10°~45°范围内预置,预置步进值为5°,摆角幅度绝对误差值≤3°,响应时间≤10s。
2)摆杆的周期能在0.5~2s范围内预置,预置步进值0.5s,周期绝对误差值≤0.1s,响应时间≤10s。
3)摆杆摆角幅度和周期在上述范围内可同时预置,由静止点开始摆动,摆角幅度值和周期相对误差要求均和发挥部分中的1)、2)相同。当摆杆稳定运行20s后发出声、光提示,并在5s内平稳停在静止点上。
4)其他。(https://www.xing528.com)
3.说明
1)图17-14a、b只作为设计参考,参赛队可以自行设计电磁控制运动装置结构。
2)摆杆和摆杆支撑轴上不能安装任何驱动装置,但可以安装角度传感器。
3)摆杆运动控制、检测装置的安装方式与控制方法由参赛队自行确定。
4)磁铁在摆杆上的安装位置不做限制,在测试过程中不允许做任何改动和调整。
5)摆角指示刻度盘绘制以1°为最小单位,可以自制或采用成品量角器,摆角测量值以摆杆上指针与指示刻度盘相对应的读数为基准。
6)摆杆自然下垂的点定义为摆杆的静止点。
7)响应时间在本题目中定义为:摆杆由初始静止状态到达稳定状态(4个周期摆幅基本相同)的时间。响应时间包括4个稳定周期摆动的时间。
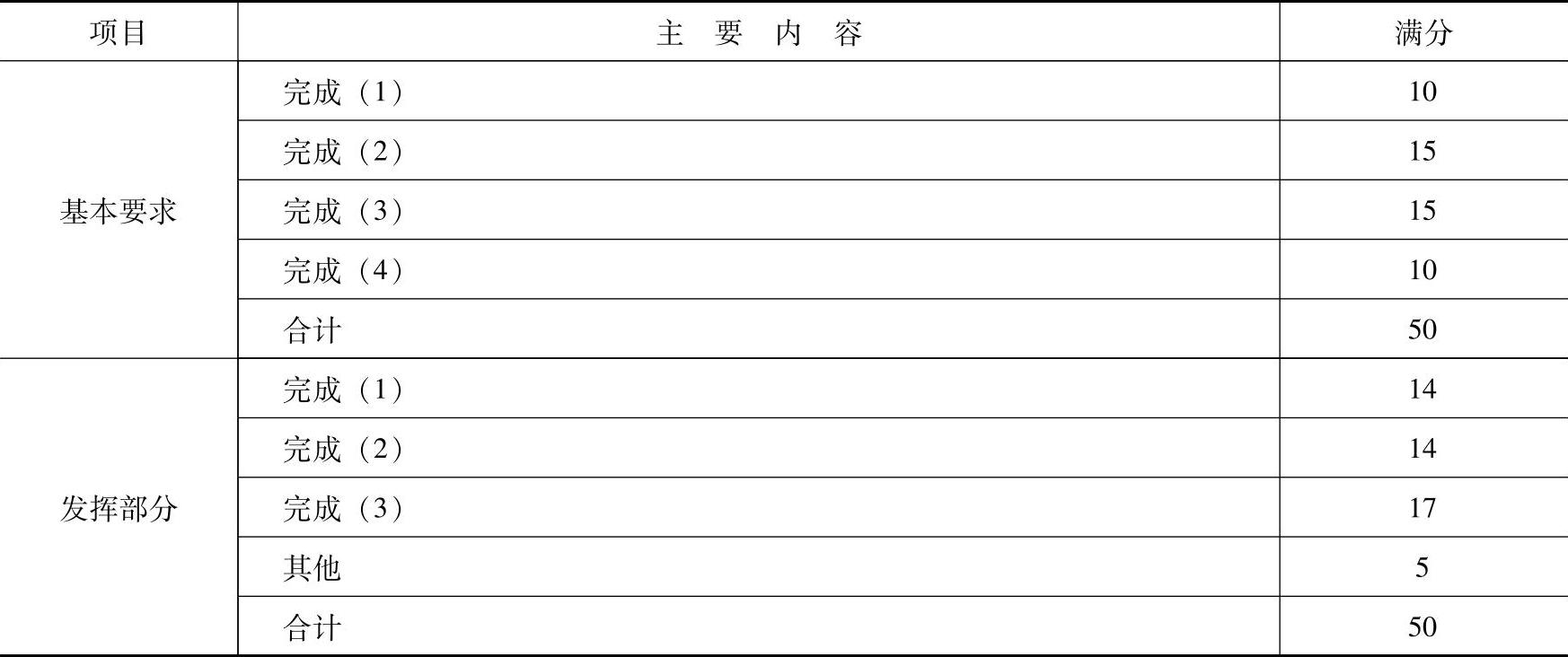
4.评分标准
表17-9给出了电磁控制运动装置项目的评分标准。
表17-9 电磁控制运动装置评分标准
(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。