



1.单极性驱动方式
单极性驱动电路如图4-86和图4-87所示。
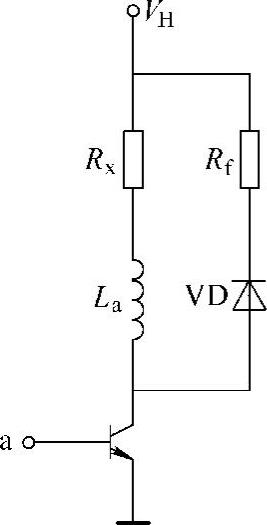
图4-86 单极性驱动电路
注:1.图中,La为某一相绕组线圈的电感;Rx为限流电阻,VD为释放二极管;Rf为释放电阻;
2.绕组的电感非常大,使得相电流的上升速度很慢,通过增加限流电阻,同时采用较大的驱动电压,就能使相电流很快达到额定值。
3.由于绕组的电感在电流突变时会产生感应电压,突然断电时会使开关管承受一个很高的电压,可能损坏开关管,为了避免这种情况,所以利用二极管增加了一路释放电路。
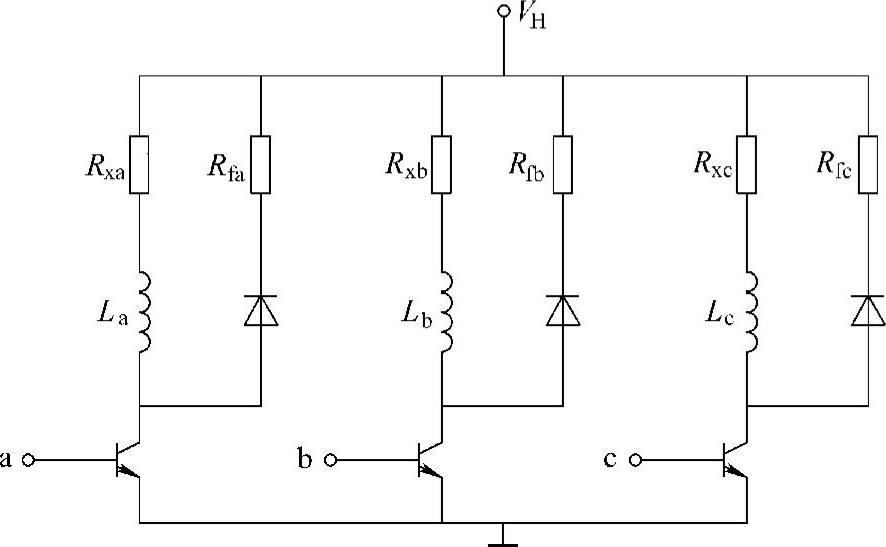
图4-87 三相步进电机单极性驱动电路
单极性驱动方式的特点是接法线路简单,使用的贵重电子元器件比较少,调试方便,运行时稳定可靠。
2.双极性驱动方式
双极性驱动电路里释放电流的衰减比单极性驱动的衰减更迅速,因为要克服直流电源电压,所以双极性驱动电路不必有释放电阻(见图4-88和图4-89)。
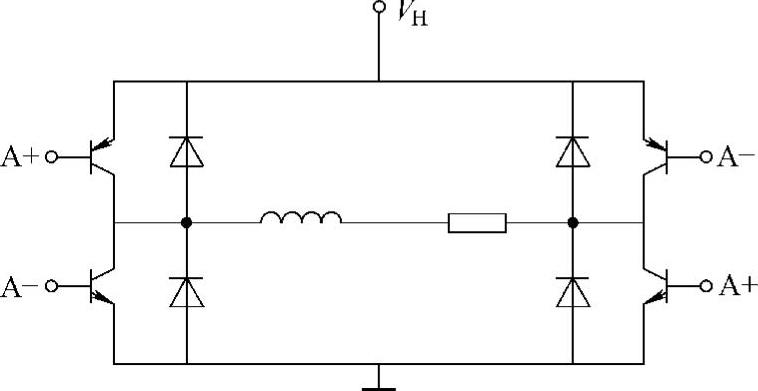
图4-88 双极性驱动电路
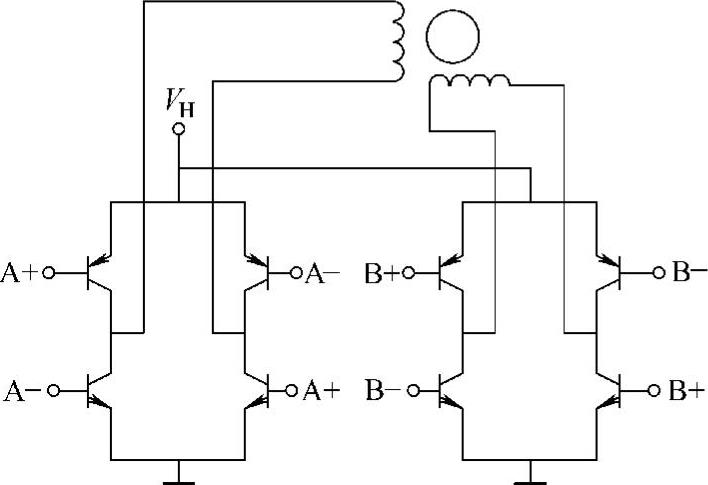
图4-89 两相步进电机双极性驱动电路
对于具有四根引线的两相步进电机,这是非常普遍的驱动方式。在一个完整的驱动器/控制器中,电子器件交替地使每相电流反向。
3.双线绕组驱动方式
双线绕组驱动方式驱动需要在每相里有两个绕组,这两个绕组产生的磁场方向是相反的(见图4-90和图4-91)。
该驱动方式要求每相上具有一个中间抽头(6根引线)的电机。与使每相中的电流反向不同的是,该驱动只需将电流从每相中的一个线圈转换到另一个线圈。通过绕组的改变使电机内部的磁场转变方向。该方案的驱动比较简单,但每次仅利用了绕组的一半。与相当的双极性电机相比,这使旋转电机产生的力矩或直线电机产生的力大约低了30%。
4.高低压驱动方式
高低压驱动电路里有两种电压,接通或截止相电流时使用高电压,励磁期间则使用低电压(见图4-92)。
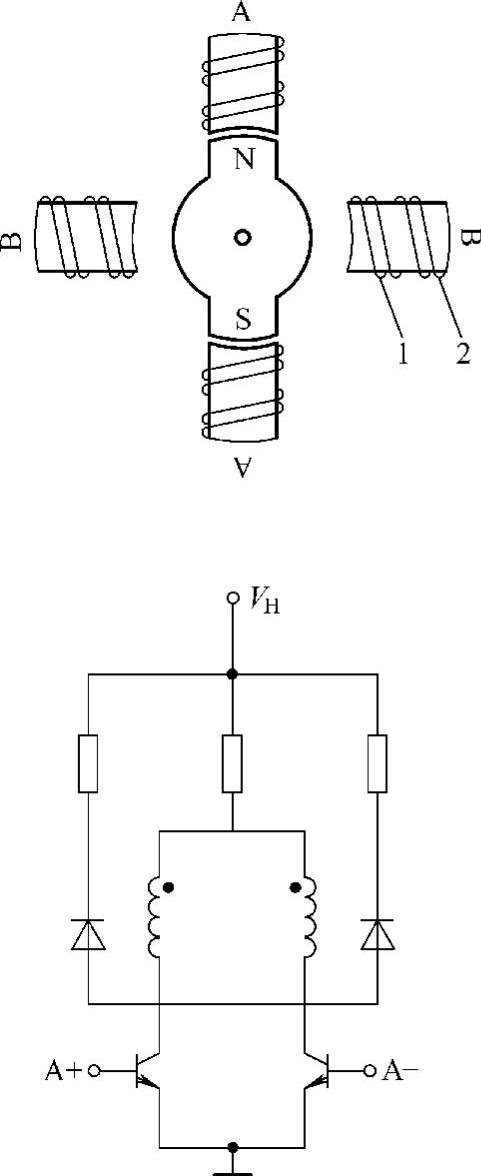
图4-90 双线绕组驱动电路
1、2—同一相中的两个绕组
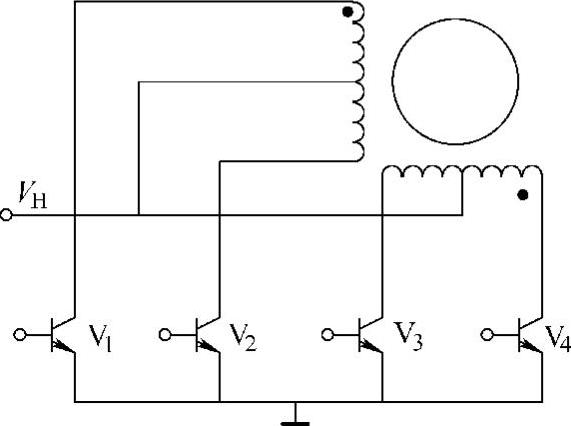
图4-91 两相步进电机双线绕组驱动电路
 (https://www.xing528.com)
(https://www.xing528.com)
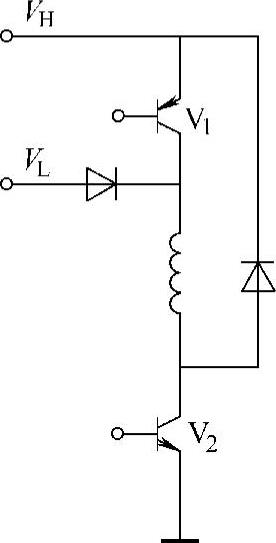
图4-92 高低压驱动电路
注:V1、V2导通时使用高电压,仅V2导通时使用低电压;电机断电时的感生电流沿二极管、VH电源、VL电源释放。
在打印机中,使用高低压驱动还有另外一种方式,就是高压用于正常的转动,而低压则用于使步进电机锁紧,免于高压锁紧时电机大量发热而烧坏,同时也可达到节省能源消耗的目的。
5.斩波驱动方式
斩波驱动电路如图4-93所示,当电流降至额定值之下时,电源电压就加到相绕组上。
斩波驱动方式允许步进电机在较高的速度下维持更大的力矩或力。斩波驱动器是一个恒定电流驱动器,通常为双极性类型。斩波驱动器是通过快速接通和关闭(断路)输出电源,以控制电机电流而得名的。对于该设置,可以使用低阻抗电机线圈和最大电源电压,此时,驱动器将传递最佳性能。作为一般原则,为获取最佳性能,电源和额定电机电压之间所推荐的比率为8∶1。斩波驱动的控制电路比较复杂,例如V1的基极驱动需要有一个控制电压为Vc的施密特触发电路,以此产生跃迁电平,如果这些电平没有被很好隔开,则V1以很高频率导通和截止,对邻近设备引起干扰和在电机里产生附加铁损。然而,斩波驱动毕竟有很多优点,例如充分利用了现有的电源电压,能够在可能的最宽速度范围内工作,消除了限流电阻上的功耗,系统效率非常高等。
6.调频调压驱动方式
调频调压驱动方式是低频时用低压驱动,高频时用高压驱动。
与一般驱动电路相比,这种驱动电路增加了一套比较电路和调压电路。
7.微步驱动方式
微步驱动方式又叫细分驱动方式。它将绕组中的电流细分,由常规的方波供电改为阶梯波供电,绕组中的电流或经过若干个阶梯上升到额定值,或以相反的方式从额定值下降到0。
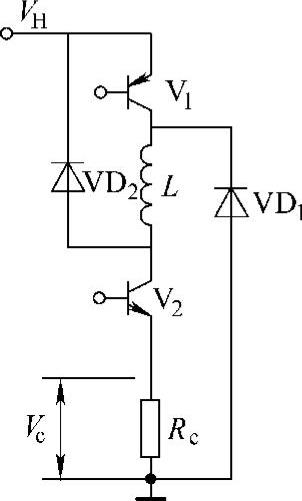
图4-93 斩波驱动电路
注:1.V1、V2的基极均为高电平时,相绕组通电,电流逐渐升高,Rc的压降也逐渐升高;电流升高至一定幅度时,Rc的压降会导致V1截止,绕组产生感生电流,并沿L-V2-Rc- VD1流动;感生电流衰减至一定幅度,V1会重新导通;外界条件没有发生改变时,上述变化会不停循环。
2.V1、V2的基极均为低电平时,绕组产生感生电流,沿L-VD2-VH-VD1流动,因包含有电源电压,衰减会非常快。
在两相都通电而两相的电流值都一样的情况下,转子的位置刚好在转子分别对齐这两相的中间位置,但当电流不一样时,转子停留的位置就是两相产生的转矩之和为0的位置,微步驱动就是根据这个原理来工作的。
首先,预先把各相对应不同细分角度的工作电流值放在存储器中,工作时根据转子的位置调出相应的驱动电流值并使阶梯波生成器产生相应数值的阶梯波,转子就可按照预先设定的细分角度一步一步地转动。例如,一个直线电机的一个步长为0.001in,将其驱动细分到每步具有10个微步,这样一个微步将为0.0001in。
微步驱动有效地减少了电机的步进增量。但是,与一个全步长的精确度相比,每个微步的精确度具有更大的百分比误差。和全步长一样,微小步进的增量误差也是非累积的。在大部分情况下,微步驱动的目的是为了减弱或消除步进电机的低步振动。
步进电机的细分技术实质上是一种电子阻尼技术,其主要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的一个附带功能。比如对于步进角为1.8°的两相混合式步进电机,如果细分驱动器的细分数设置为4,那么电机的运转分辨率为每个脉冲0.45°,电机的精度能否达到或接近0.45°,还取决于细分驱动器的细分电流控制精度等其他因素。不同厂家的细分驱动器精度可能差别很大,细分数越大精度越难控制。
8.锁定电路
步进电机具定位保持力,在停止状态下(保持直流电压,无脉波信号输入时),仍具有励磁保持力,故既使不依靠机械式制动,也能做到停止位置的保持。
在锁定状态下,由于线圈的内阻比较低,此时的静态电流是很大的,如果长时间通电,会很容易烧毁电机,为此可切换使用一个低电压,既能锁定电机,静态电流也不大。
9.驱动芯片
由于步进电机在各行各业的应用越来越广泛,现在已经出现了不少的专用驱动芯片,这些驱动芯片集成了逻辑控制和功率放大电路等功能,有的还带有微步驱动的功能,用户使用起来非常便捷(见图4-94)。
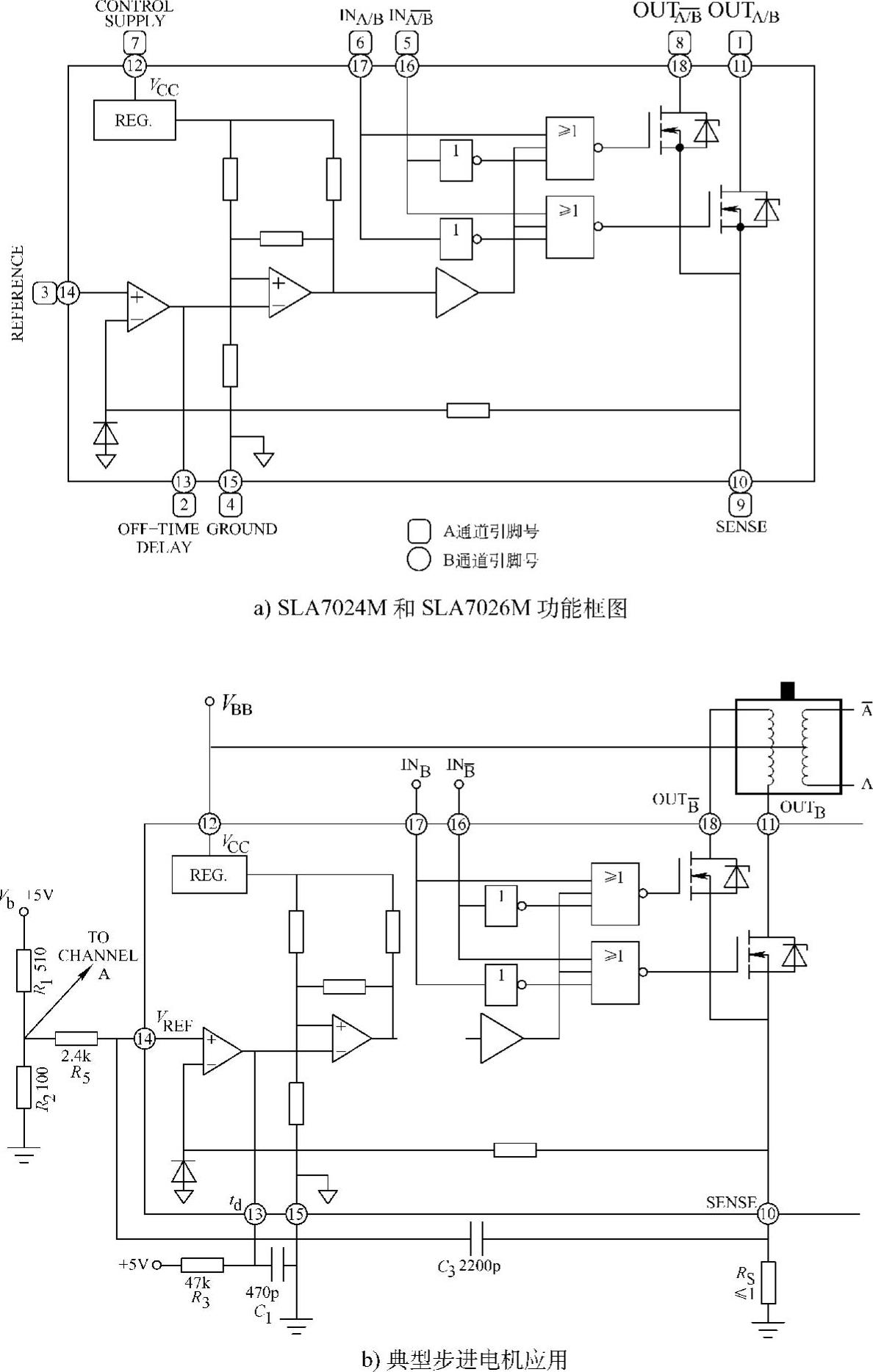
图4-94 步进电机驱动芯片
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。