



把本文所提出的摩擦状态估计器用于图5-2系统的仿真,该系统的动态模型为

式中k1和k2——刚性弹簧系数;
Ff1和Ff2——摩擦力;
u1和u2——控制输入;
y1和y2——系统输出。设x ,
, ,x3=y2,
,x3=y2, ,那么上面的方程(5-38)能改写为如下形式
,那么上面的方程(5-38)能改写为如下形式

式中x=(x1,x2,x3,x4)T;
A=diag[A1,A2];
B=diag[B1,B2];
CT=diag[C1,C2];
u=(u1,u2)T, ;
; ;
; ;
;
i=1,2; ,F(x)=[Ff1/m1,Ff2/m2]T;
,F(x)=[Ff1/m1,Ff2/m2]T; T。
T。
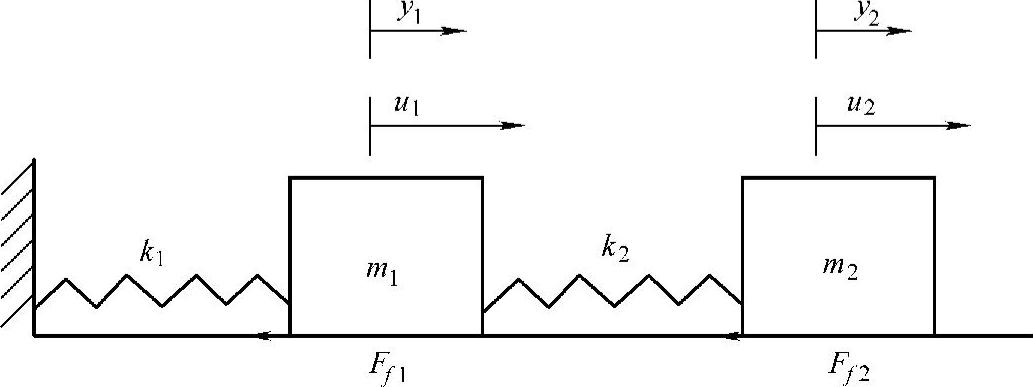
图5-2 二自由度系统的示意图
仿真过程的摩擦力Ffi=μFN,其摩擦因数μ的三种模型:①μ 。②μ=
。②μ= 。③
。③ 。
。
在第一个仿真里,图5-2中的Ff1和Ff2摩擦模型分别取Couloumb模型和Couloumb+Viscous摩擦模型。在另一个仿真里,将图5-2中Ff1的Couloumb模型换成一个较复杂的摩擦模型,也就是Stribeck模型,进一步考察系统的观测性能。表5-1是三种摩擦模型的参数定义及给定值。
表5-1 摩擦模型参数与结构

步骤1.变量 的隶属度函数选择如下:
的隶属度函数选择如下: ,
, ,
, ,
, ,
, ,
, 1,2,3,4)。
1,2,3,4)。
建立如下的模糊规则库:
1) 。(https://www.xing528.com)
。(https://www.xing528.com)
2) 。设
。设
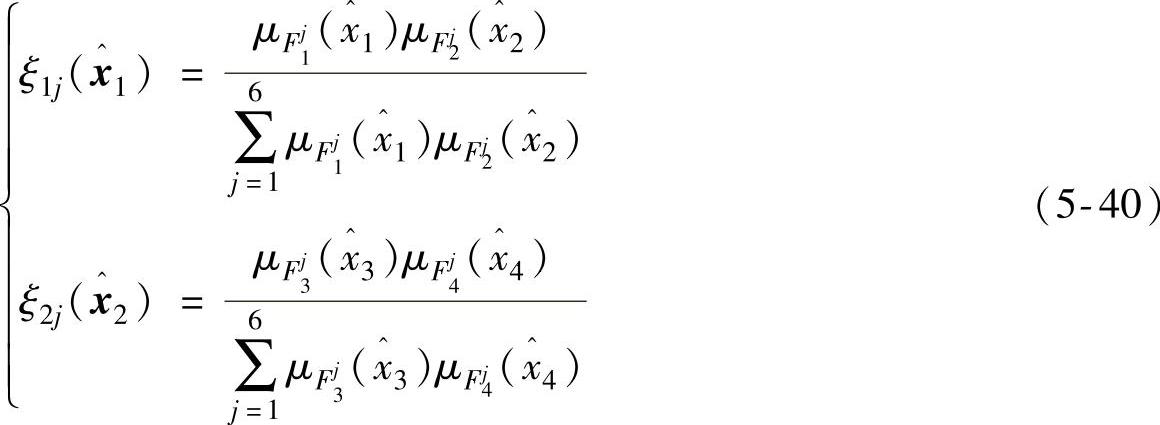
那么得到下面的模糊基函数:

步骤2.系统仿真参数选择:
γ=100,L-1=1/(S+3),ρ=15,x(0)=(0.5,0.0,-0.5,0.0)T, (0.0,0.0,0.0,0.0)T,Ko=[8918400;0089184]T,
(0.0,0.0,0.0,0.0)T,Ko=[8918400;0089184]T, (-8,-6,-1,3,8,1)T。
(-8,-6,-1,3,8,1)T。
步骤3.求解方程(5-22),可得摩擦建模状态估计器
步骤4.选择下面的参数自适应律

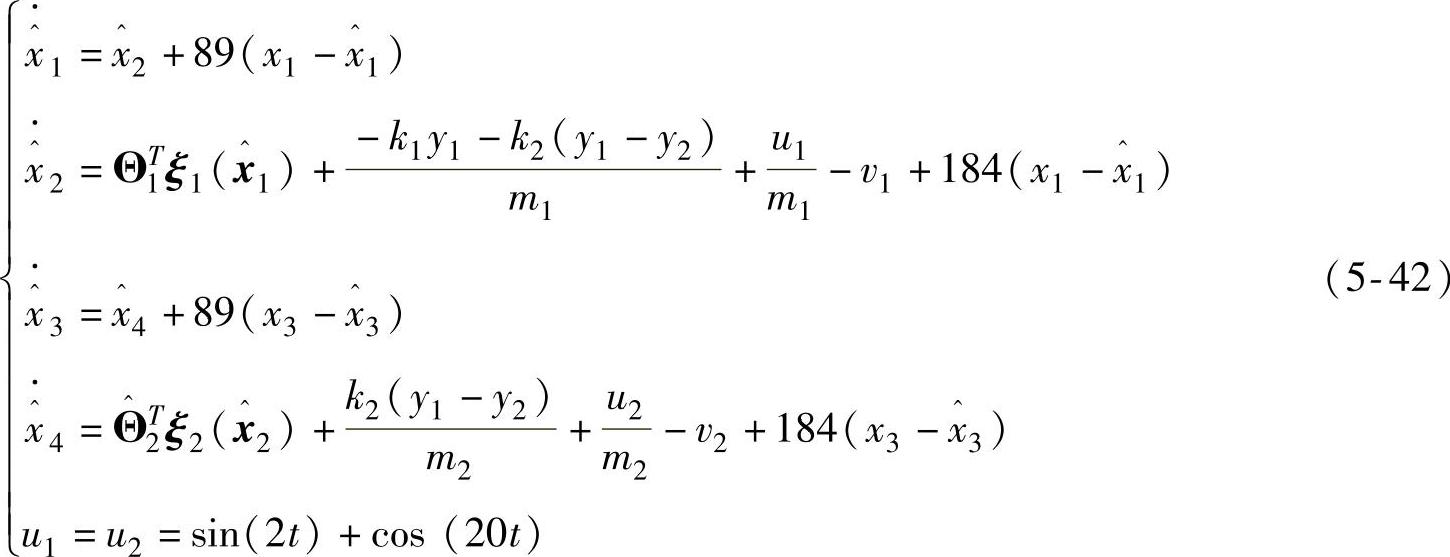
图5-3是图5-2中的Ff1和Ff2分别取Couloumb和Couloumb+Viscous摩擦时,状态估计器所估计的位置与速度曲线和实际曲线。而图5-4是图5-2中的Ff1和Ff2分别取Stribeck和Couloumb+Viscous摩擦时,状态估计器所估计的位置与速度曲线和实际曲线。在前面两个仿真里,鲁棒补偿控制项为 ,m1=m2=1.00kg,k1=1.0N/m,k2=2.0N/m。
,m1=m2=1.00kg,k1=1.0N/m,k2=2.0N/m。
图5-5是图5-2中的Ff1和Ff2分别取Couloumb和Couloumb+Viscous摩擦时,状态估计器所估计的位置与速度曲线和实际曲线。而图5-6是图5-2中的Ff1和Ff2分别取Stribeck和Couloumb+Viscous摩擦时,状态估计器所估计的位置与速度曲线和实际曲线。在后面两个仿真里,鲁棒补偿控制项为 ),
), ,m1=0.20kg,m2=0.25kg,k1=100.0N/m,k2=200.0N/m。
,m1=0.20kg,m2=0.25kg,k1=100.0N/m,k2=200.0N/m。
从这四个仿真结果可以看出,无论摩擦力取Couloumb摩擦模型、Couloumb+Viscous摩擦模型、Stribeck摩擦模型,还是系统的质量和弹簧刚性参数在变化,我们所设计的摩擦状态估计器具有良好的状态估计效果,具有良好的自适应特性,完全可以用该估计状态对摩擦进行建模与控制补偿。
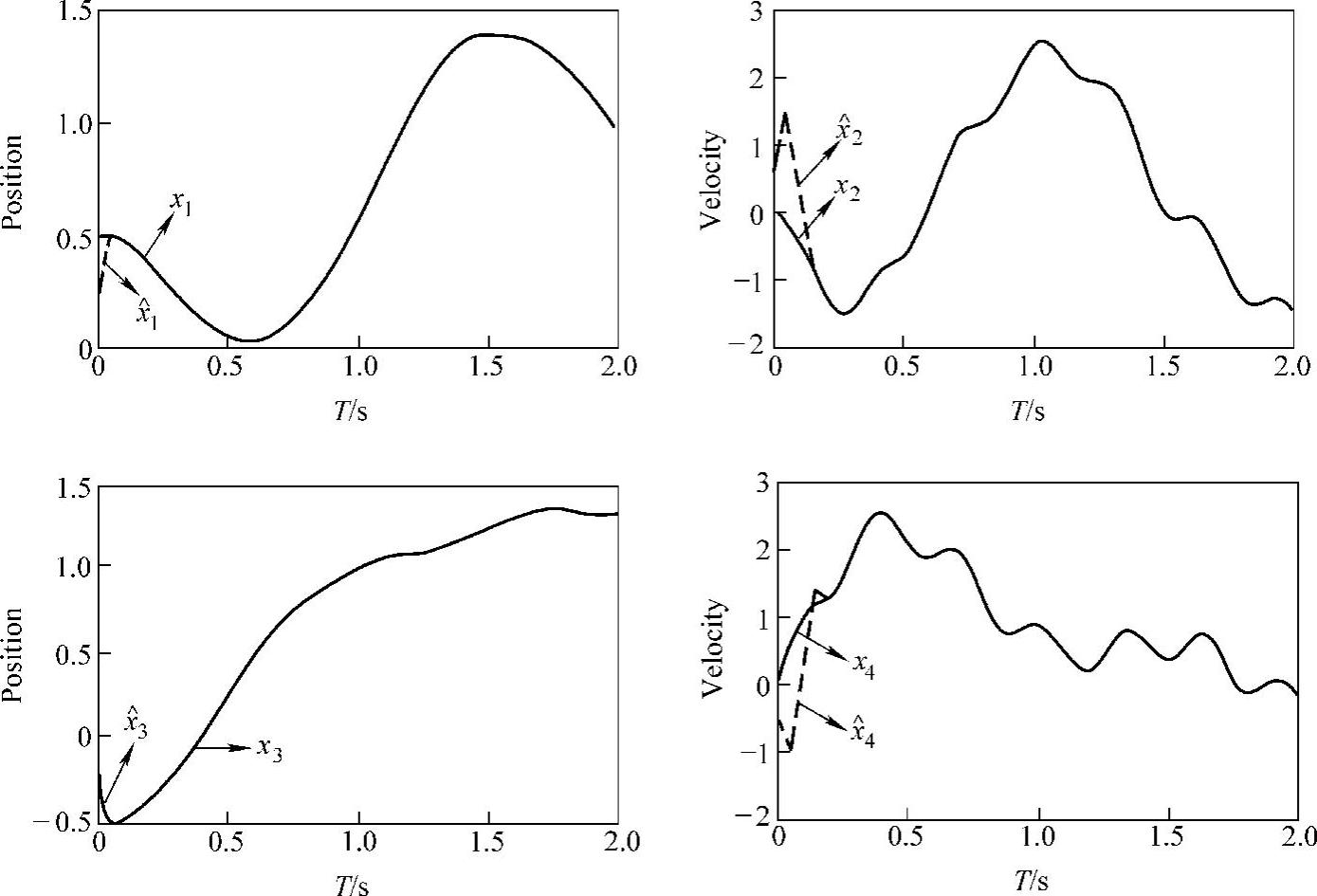
图5-3 实际状态x和估计状态x^
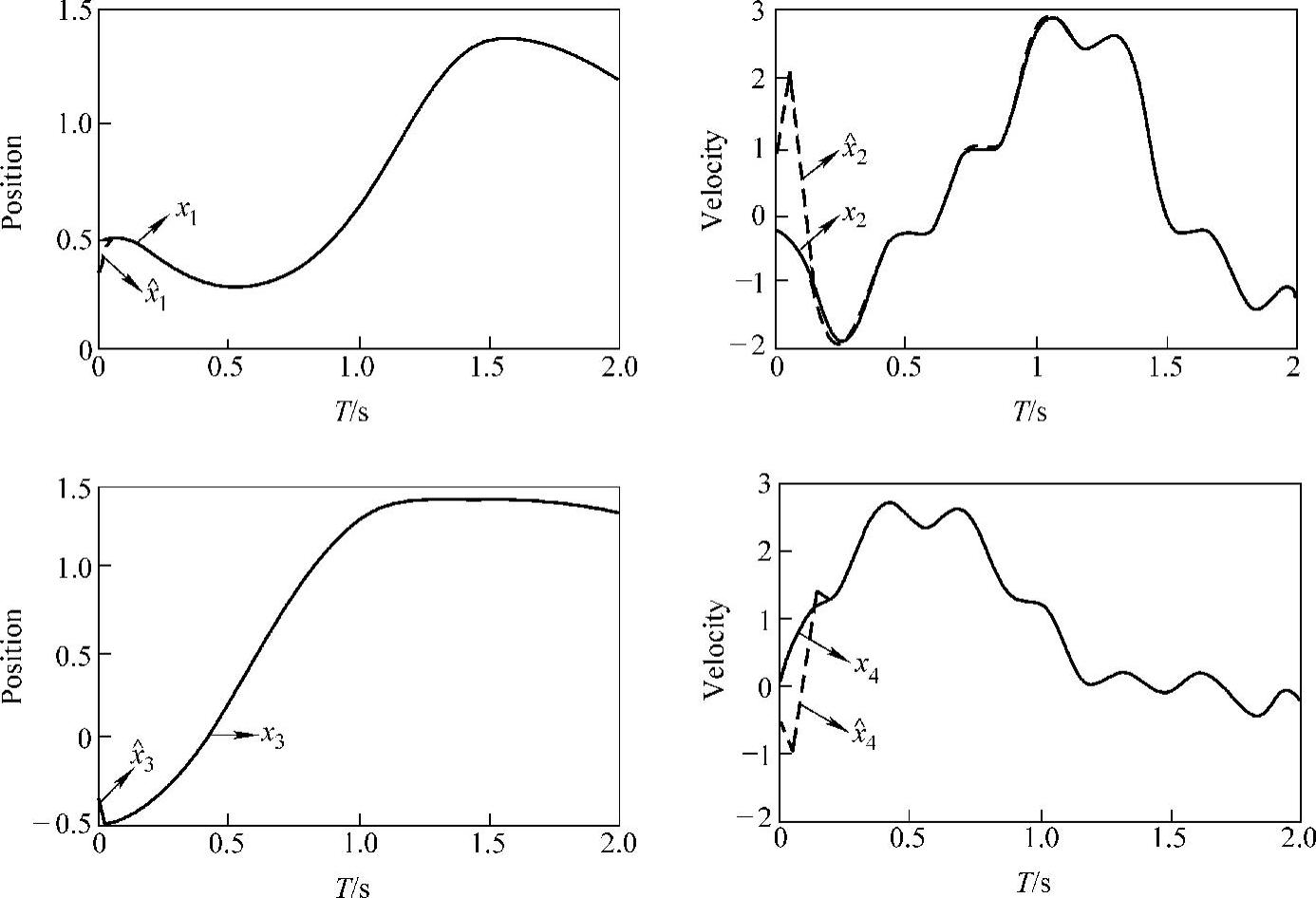
图5-4 实际状态x和估计状态x^
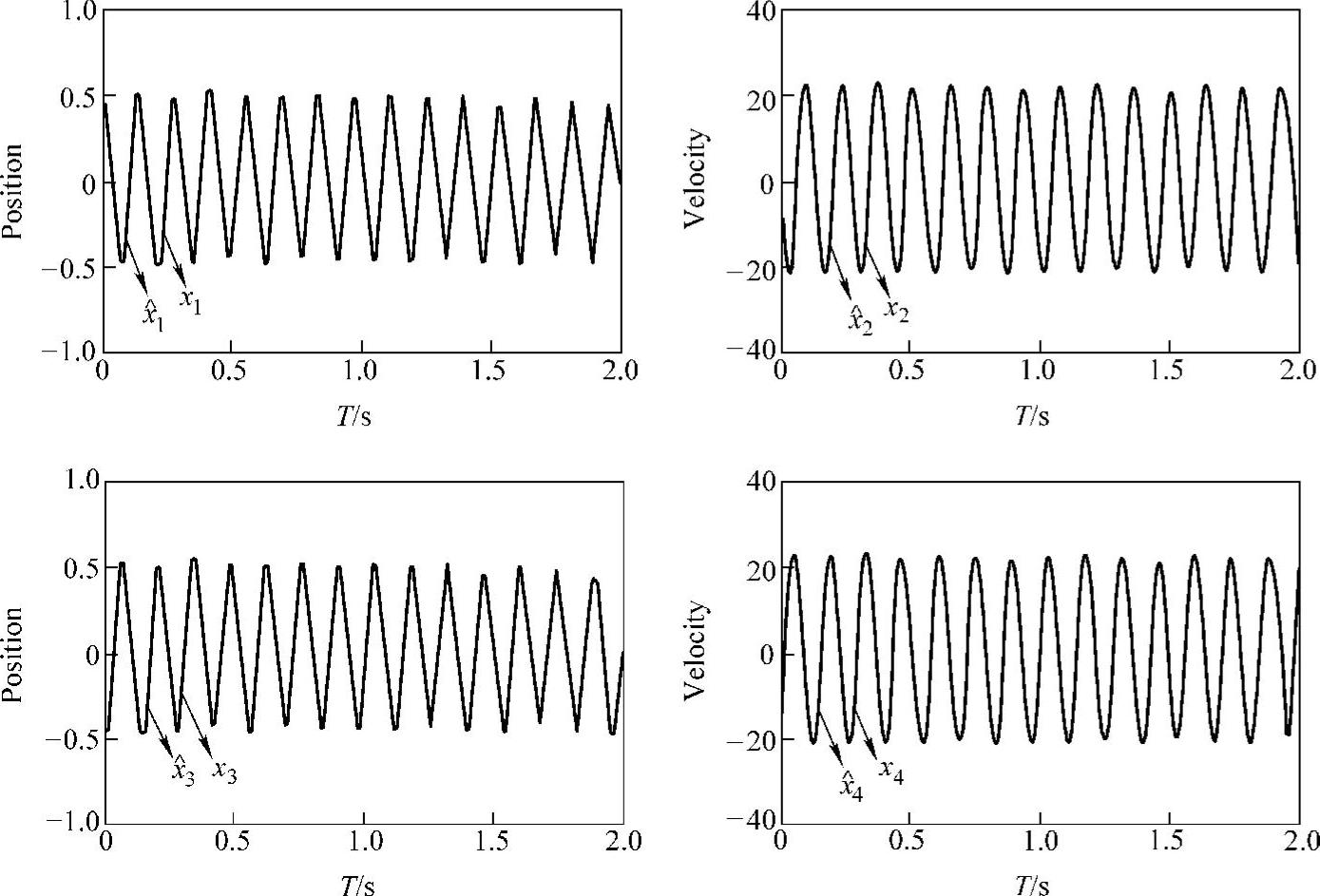
图5-5 实际状态x和估计状态x^
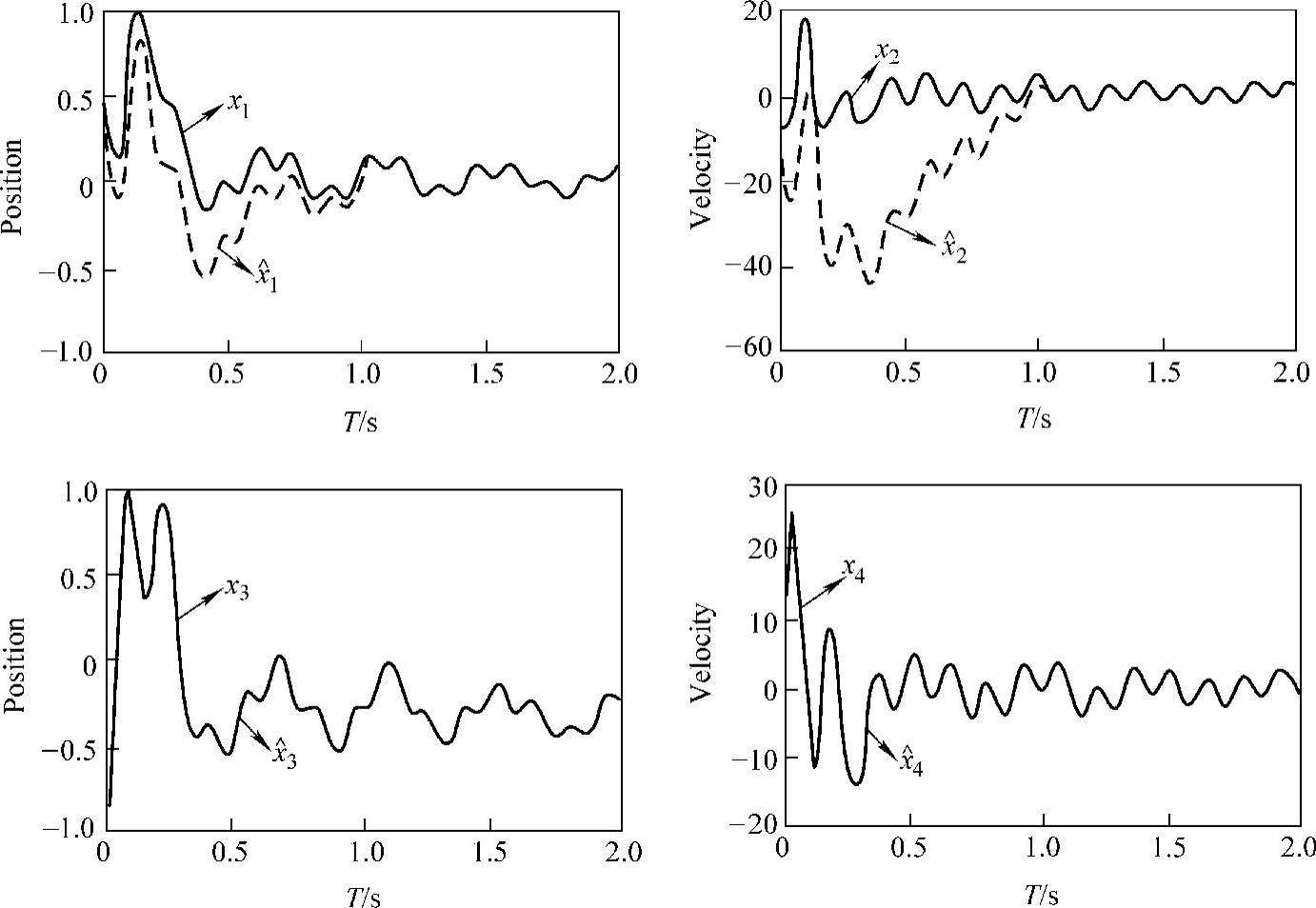
图5-6 实际状态x和估计状态x^
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。