



用上面的控制器进行了如下控制实验。
实验目标:设定机器人腰部环节转角30°,通过两种外加控制方法进行调节,对调节误差进行分析,以便分析控制方法。
在机器人的上位机界面输入的是十进制的设定角位置,而码盘检测到的实际角位置是用十六进制表示。十进制的角位置和十六进制的角位置经测量有如下的对应关系
y16→10=αx10(8-4)在上式中,测量值经过统计回归得α=2.1。在这个实验里,设定转角30°,30°对应码盘十六进制为3F。
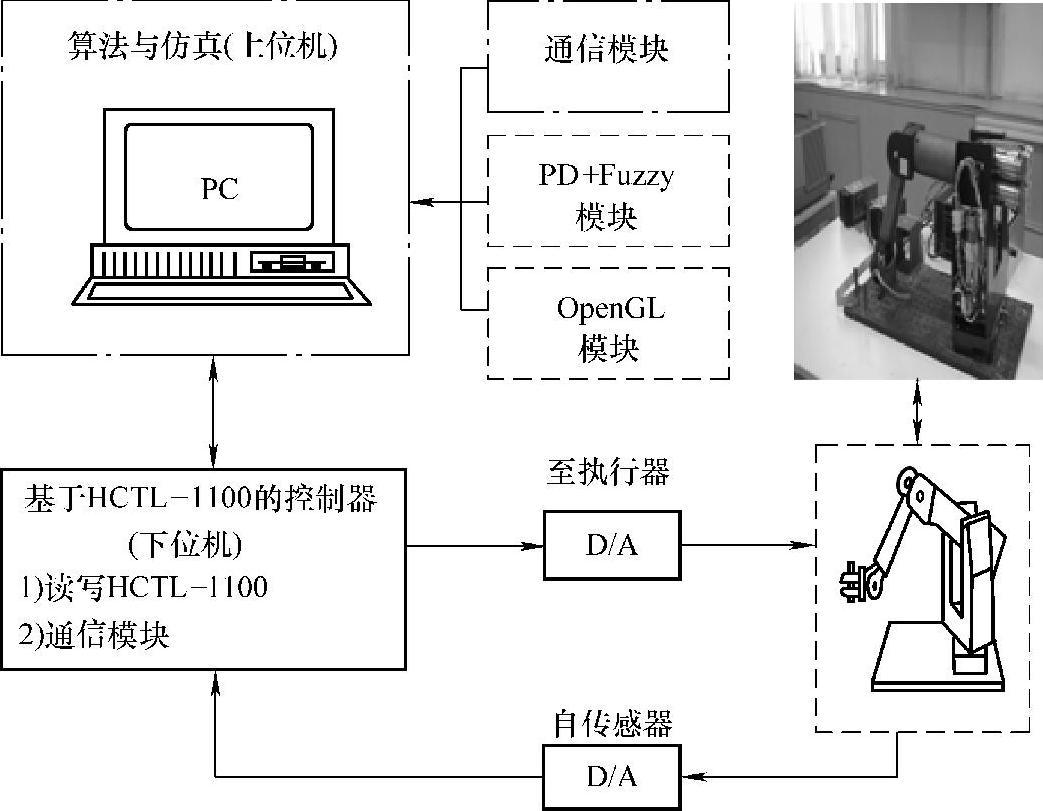
ZEBRAZERO机械手是美国IMI公司生产的一台小型低惯量机械手,只能在适中的最大速度、加速度下运行,最大承受力980N,力矩39.2N·m。正常工作时,力限最大为19.6N,力矩4.9N·m。在这台机械手上验证本文提出的算法,控制系统结构简图如图8-10所示[5]。
 (https://www.xing528.com)
(https://www.xing528.com)
图8-10 控制系统的结构图
核心部件HCTL-1100是美国Agilent公司生产的高性能通用运动控制系列芯片,它内部集成了数字滤波器、换向器等可编程器件,内部具有内置控制算法,因而可以使系统用最少的元件来实现运动控制。为了验证本文的算法,我们屏蔽了HCTL-1100芯片的内置控制算法,只用HCTL-1100芯片的读写功能,而在上位机系统开发了外置控制算法。控制结果如表8-1所示。
表8-1 算法控制结果

在上面控制系统结构中:上位机和下位机通过通信模块完成信息通信;下位机向伺服系统传送控制指令,通过编码器反馈回所需要的位置信号。为完成本文算法,速度和加速度信号通过编码器的位置信号经差分得到。通过上面的码盘返回值可以看出,用无补偿控制方法系统被调节到30°(十六进制表示为3F)附近,而产生了波动。用本文提出的基于自适应模糊系统的双调节补偿控制方法系统被调节到30.5°(十六进制表示为40),但没有产生波动。码盘的返回值用三个字节表示,在本试验中只用到中位字节,而高、低位字节没用。如果把高、低位字节考虑进去,试验结果会更理想。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。