



成对的冗余机架,对外来说相当于一个单机系统,无论是修改程序、下载程序或是上位机和其他控制器访问,都跟单机的控制器一样,但是作为互为冗余的硬件设备,它们是两个独立的物理机架。在1757-SRM模块组态中可以看出,是用A机架和B机架来区分的,要了解究竟是A机架工作在主机状态还是B机架工作在主机状态,固然能从1757-SRM模块上读到,但是这些机架平时都是封闭在控制柜中。此外,如果系统发生了切换,需要维护人员介入进行处理,这可以通过编制冗余系统监控程序来实现。
获取冗余系统的状态,可以:
1)在人机界面观察冗余系统的工作状态。
2)基于系统的状态编制代码去执行。
3)得到诊断信息去维护系统。
例如执行GSV指令读取冗余系统的信息,确定主机控制器当前位于哪个物理机架,得到的“PhysicalChassisID”代码给出使用机架代码,“1”代表A机架,“2”代表B机架,如图6-38所示。
此处读到的信息可以在上位机编辑图形来显示冗余系统的工作状态。下面是当冗余系统发生切换时报警的逻辑编程,指令不断执行以获得当前物理机架的ID。
程序首次扫描时执行,将“ChassisIDNow”值赋给“Chas-sisIDLast”,如图6-39所示。
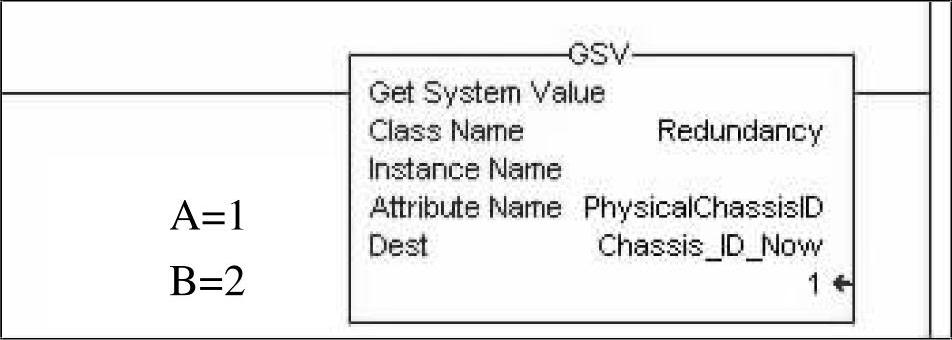
图6-38 GSV指令读取冗余系统信息
“Chassis ID”一旦发生变化,冗余切换就发生了,锁存切换状态,并存放新的对比值,如图6-40所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-39 存放机架ID对比的值
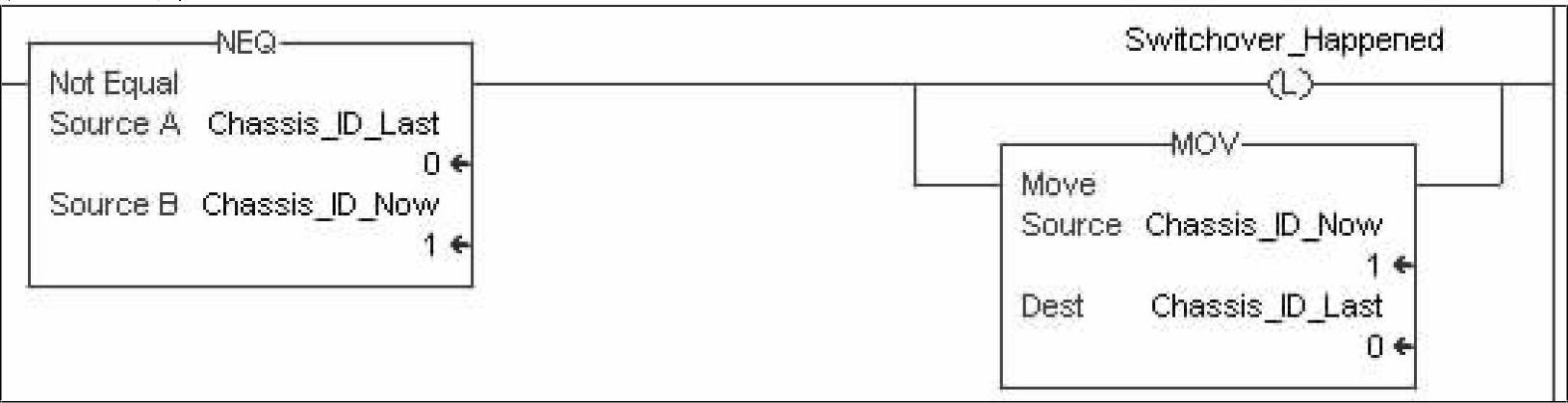
图6-40 锁存切换状态
切换报警锁存,并解锁切换状态,准备下次的状态锁存,如图6-41所示。
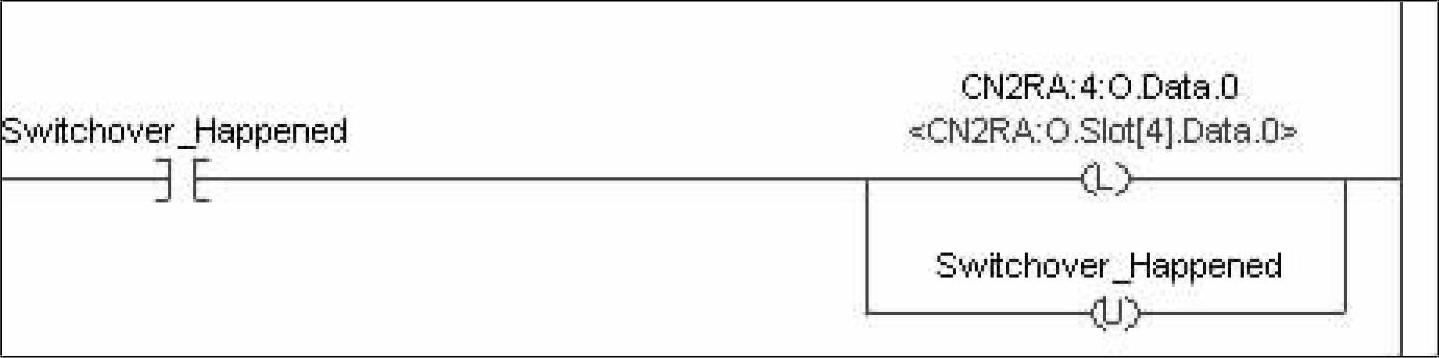
图6-41 解锁切换状态
确认切换,复位切换报警,如图6-42所示。
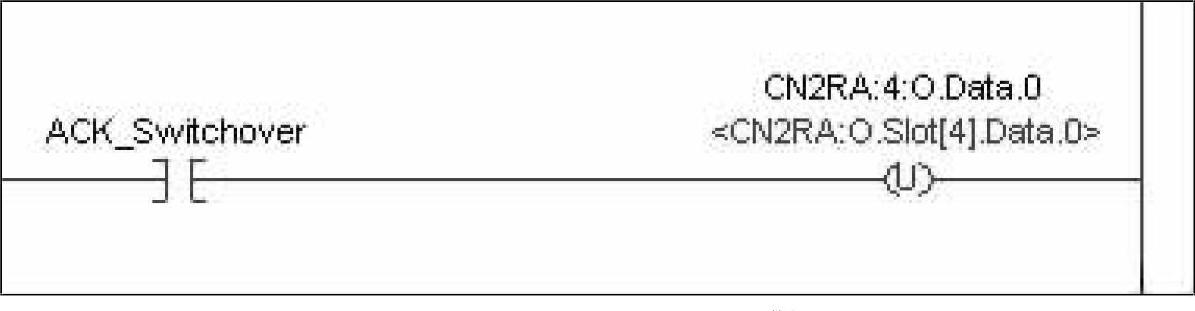
图6-42 复位切换报警
至此,监视冗余系统的程序编制基本完成。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。