



进入Mechanical后,单击【Analysis Setting】出现如图9-9所示的详细分析设置栏。
(1)步长控制【Step Controls】 用于控制时间步长。时间步长不仅控制着动力学响应的准确性,而且还控制着非线性系统的准确性和收敛性。时间步长的设置一般要足够小,这样才能更准确地描述随时间变化的载荷。
1)时步数【Number Of Steps】,默认值为1。
2)当前时间步【Current Step Number】,默认值为1。
3)时间步终止【Step End Time】,对非线性分析提供了一个方便设置载荷步和子载荷步的方法,默认值为1.0。
4)自动时间步的设置【Auto Time Stepping】,用来优化载荷增量减少求解时间,当默认为开启状态时,可定义初始、最小、最大时间步;设置为关闭时,需定义时间步【Time Step】。
5)定义【Define By】,默认为时间。
6)初始时间步【Initial Time Step】,用来确定初始载荷增量,求解从初始增量开始。
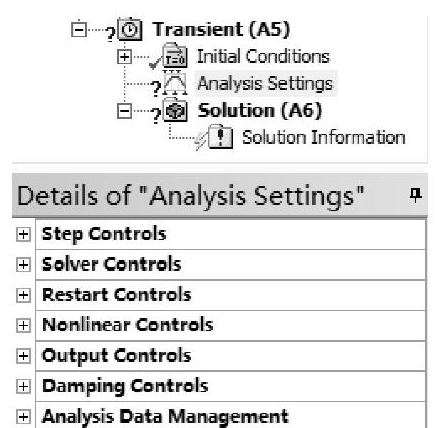
图9-9 柔性体动力分析设置(https://www.xing528.com)
7)最小时间步【Minimum Time Step】,可以防止Mechanical进行无限次的求解。最小时间步长可以指定为初始时间步长的1/10或1/100。
8)最大时间步【Maximum Time Step】,根据精度的要求确定,该值可以与初始时间步长一样或者稍大一点。
9)时间积分【Time Integration】,默认为开启,在加载阶段相当于快速加载,即考虑加载时的动力效应,在分析阶段相当于动力分析;若将其设为off时,相当于缓慢加载和静力分析,即不考虑动力效应。
(2)求解控制【Solver Controls】 具体参看第4章4.2.7(2)。
(3)重启动控制【Restart Controls】 具体参看第4章4.2.7(4)。
(4)非线性控制【Nonlinear Controls】 具体参看第4章4.2.7(6)。
(5)输出控制【Output Controls】 具体参看第4章4.2.7(7)。
(6)阻尼控制【Damping Controls】 其中数值阻尼【Numerical Damping】也称振幅衰减因子,用来控制因结构高频产生的数字噪声,默认值为1,也可手动输入。更多选项参看第8章8.3.3(4)。
(7)分析数据管理【Analysis Data Management】 具体参看第4章4.2.7(8)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。