



1)右键单击【M1101_关节总成_ZPassyfem1.afm】节点,选择【新建仿真】节点,文件名为【M1101_关节总成_ZP_assyfem1sim1.sim】。
2)弹出【解算方案】对话框,名称改为【SOL101_Bolt1D】,【解算方案类型】下拉列表框中选择【SOL 101线性静态-全局约束】选项。
3)隐藏所有网格,仅显示几何体。在节叉A的大圆孔内表面创建【圆柱形约束】 ,径向增长设为【固定】,其他【自由】,如图11-26所示。这个圆柱约束限制了内孔的径向移动。然后在端面创建【固定平移约束】
,径向增长设为【固定】,其他【自由】,如图11-26所示。这个圆柱约束限制了内孔的径向移动。然后在端面创建【固定平移约束】 ,如图11-27所示,限制端面的任何移动。两个约束存在冲突,右键单击【SOL101_Bolt1D】节点,选择【解决冲突】节点,应用【NoTrans(1)】解决冲突。
,如图11-27所示,限制端面的任何移动。两个约束存在冲突,右键单击【SOL101_Bolt1D】节点,选择【解决冲突】节点,应用【NoTrans(1)】解决冲突。

图11-26 圆柱约束

图11-27 固定平移约束
4)正如11.1中提到的那样,圆柱约束自动创建了一个圆柱坐标系。右键单击【约束】下的【Cylindrical(1)】,选择【求解器语法预览】,弹出代码信息窗口,如图11-28所示。C1字段全部为1,表示约束了DOF1,即限制了圆柱坐标系下的径向移动。
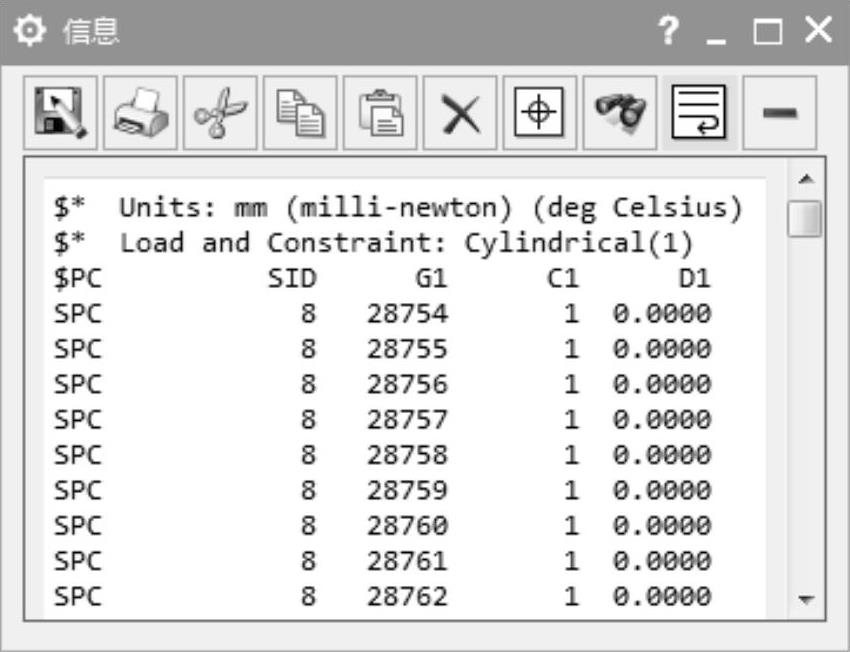
图11-28 圆柱约束的求解器语法预览
5)添加【扭矩】 载荷,选择输入轴末端的圆柱面,【扭矩】参数框中输入【30N·m】,如图11-29所示。
载荷,选择输入轴末端的圆柱面,【扭矩】参数框中输入【30N·m】,如图11-29所示。
6)显示1D连接单元,添加【螺栓预紧力】 载荷,【类型】下拉列表框中选择【1D单元上的力】选项,选择螺栓的BAR单元,【力】参数框中输入【8000N】,如图11-30所示,单击【确定】按钮。(https://www.xing528.com)
载荷,【类型】下拉列表框中选择【1D单元上的力】选项,选择螺栓的BAR单元,【力】参数框中输入【8000N】,如图11-30所示,单击【确定】按钮。(https://www.xing528.com)

图11-29 施加扭矩
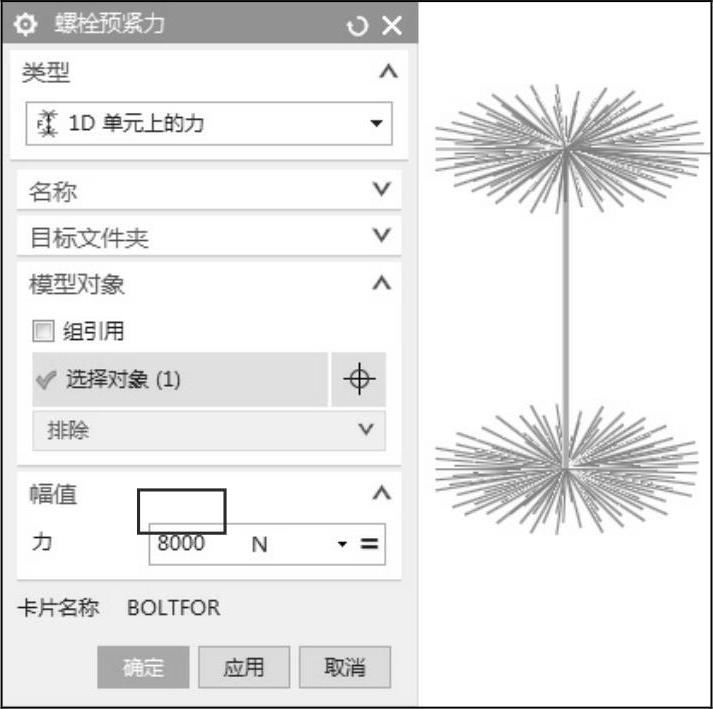
图11-30 施加螺栓预紧力
7)创建接触之前,可以先创建接触区域。前面划分十字轴的网格,是通过网格对称复制得到的。复制的网格没有和几何体相关联,所以不能直接在十字轴的几何面上创建接触区域,而应该通过网格面来创建。节叉的接触区域可以直接选择几何面。
①单独显示十字轴的网格,单击【区域】 按钮,名称改为【FACE_10Z】,将过滤选择栏设置为【单元面】,选择方法改为【特征角度单元面】,如图11-31所示,单击【确定】按钮。
按钮,名称改为【FACE_10Z】,将过滤选择栏设置为【单元面】,选择方法改为【特征角度单元面】,如图11-31所示,单击【确定】按钮。
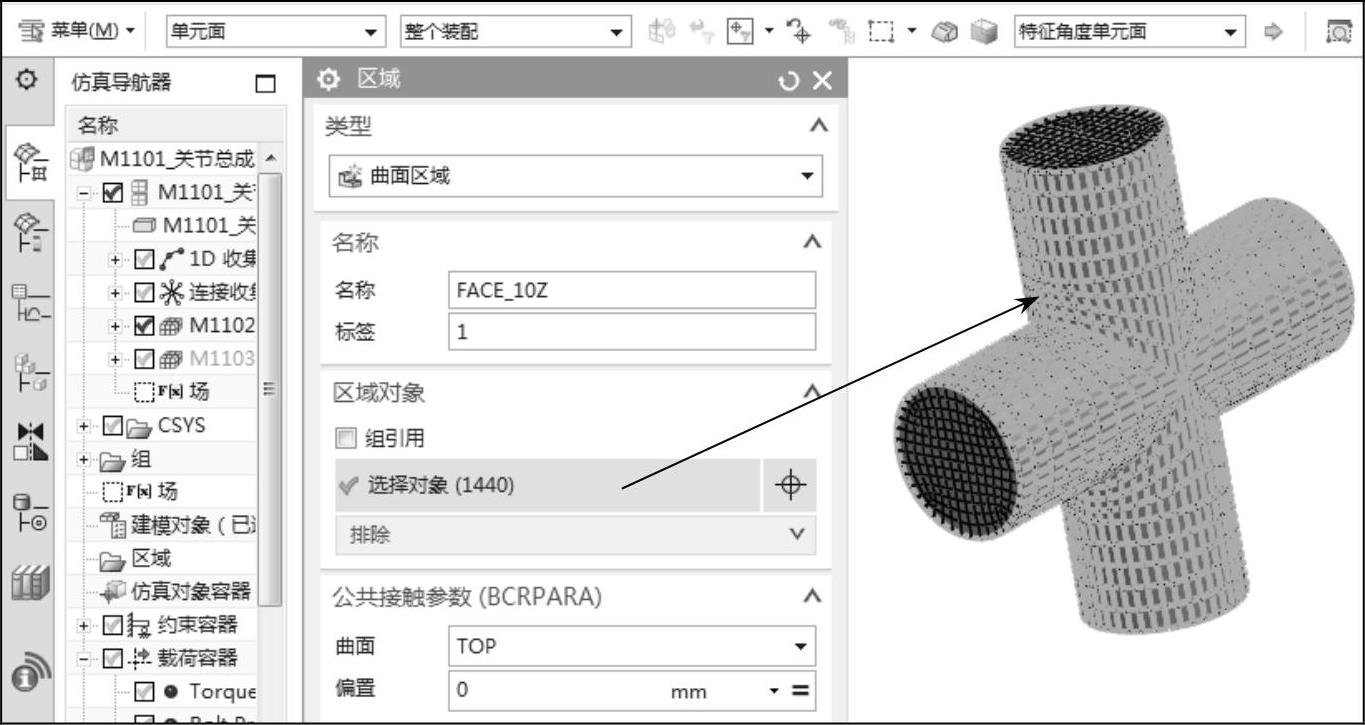
图11-31 十字轴的接触区域
②单独显示两个节叉的几何体,单击【区域】 按钮,名称改为【FACEA】,将选择方法改为【无方法】,过滤选择栏设置为【多边形面】,选择节叉A与十字轴配合的面(4个半圆面),单击【应用】按钮。名称再改为【FACEB】,选择节叉B与十字轴配合的面(4个半圆面),单击【确定】按钮。
按钮,名称改为【FACEA】,将选择方法改为【无方法】,过滤选择栏设置为【多边形面】,选择节叉A与十字轴配合的面(4个半圆面),单击【应用】按钮。名称再改为【FACEB】,选择节叉B与十字轴配合的面(4个半圆面),单击【确定】按钮。
8)创建【面对面接触】 ,【类型】下拉列表框中选择【手动】选项,【源区域】下拉列表框中选择【FACEA】选项,【目标区域】下拉列表框中选择【FACE10Z】选项,【静摩擦系数】参数框中输入【0.1】,单击【应用】按钮。继续创建接触,【源区域】下拉列表框中选择【FACEB】选项,【目标区域】下拉列表框中选择【FACE10Z】选项,【静摩擦系数】参数框中输入【0.1】,单击【确定】按钮。
,【类型】下拉列表框中选择【手动】选项,【源区域】下拉列表框中选择【FACEA】选项,【目标区域】下拉列表框中选择【FACE10Z】选项,【静摩擦系数】参数框中输入【0.1】,单击【应用】按钮。继续创建接触,【源区域】下拉列表框中选择【FACEB】选项,【目标区域】下拉列表框中选择【FACE10Z】选项,【静摩擦系数】参数框中输入【0.1】,单击【确定】按钮。
9)右键单击【SOL101_Bolt1D】节点,选择【编辑】节点,在【输出请求】中打开【接触结果】,保存文件并提交求解。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。