



边界条件设置完成后,即可以进行解算了。之后会根据得到的结果查看拉伸和扭曲的变形效果,最后输出结果。
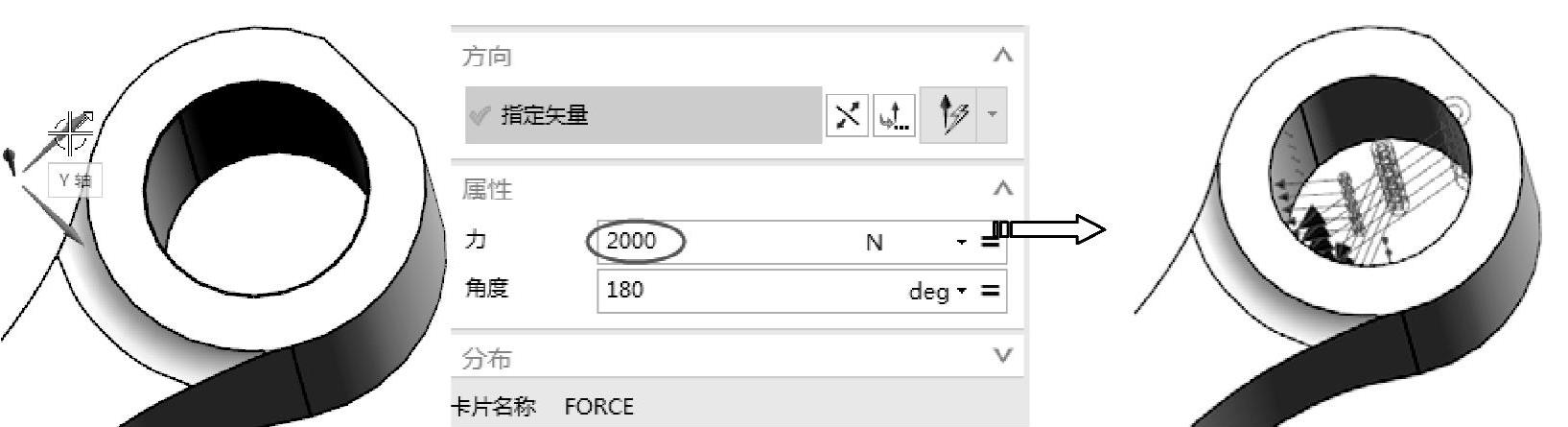
图9-74 添加Y轴方向的轴承载荷
(1)解算分析
01 在【解算方案】面板中单击【求解】按钮 ,弹出【求解】对话框。
,弹出【求解】对话框。
02 单击【编辑解算方案属性】按钮,弹出【解算方案】对话框。在此对话框中勾选【单元迭代求解器】复选框,其他选项保留默认设置,单击【确定】按钮,完成解算方案的编辑,如图9-75所示。
技巧点拨
选择迭代求解器的作用是提高速度,减少内存使用,并且比标准的稀疏矩阵求解器降低磁盘要求,可用于不包括联系人的线性静态分析、以实体元素为主的模型显示最佳性能,对于主要由抛物线四面体单元组成的模型是非常有效的。
03 在【求解】对话框中单击【确定】按钮,开始解算,得到如图9-76所示的结果信息。信息中描述得很清楚,整个解算过程没有出现任何错误。

图9-75 设置解算方案
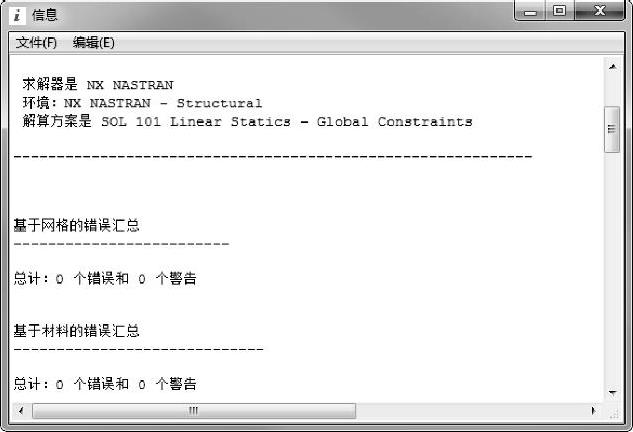
图9-76 解算结果的信息(https://www.xing528.com)
04 在仿真导航器【Solution 1】工况下的【结果】子工况中双击分析结果 ,切换到后处理导航器中。展开【结构】视图列表,查看分析的结果,如图9-77所示。
,切换到后处理导航器中。展开【结构】视图列表,查看分析的结果,如图9-77所示。
(2)查看结果
01 在【结果】视图列表中双击一个结果(如应力-单元),屏幕中显示结果云图,如图9-78所示。
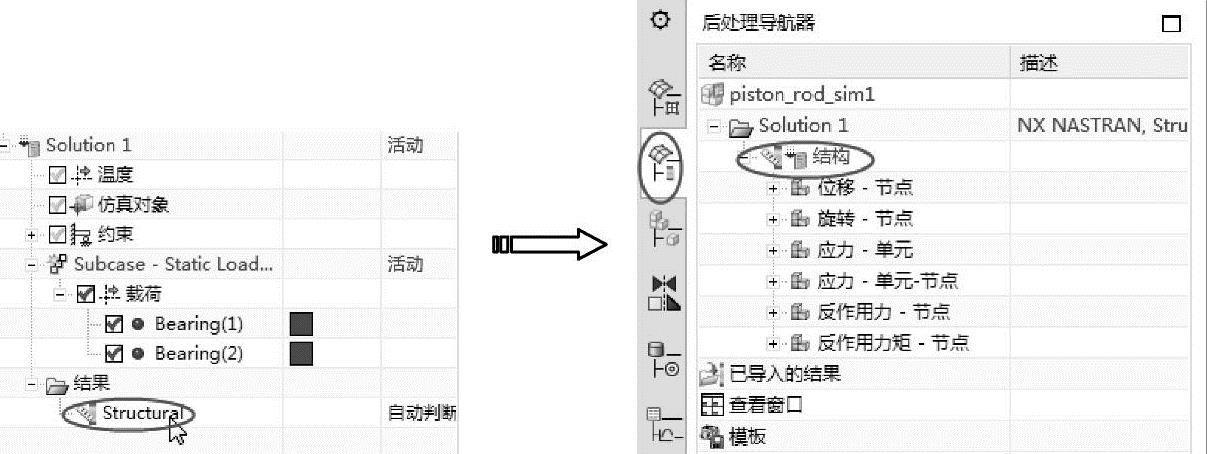
图9-77 查看分析结果
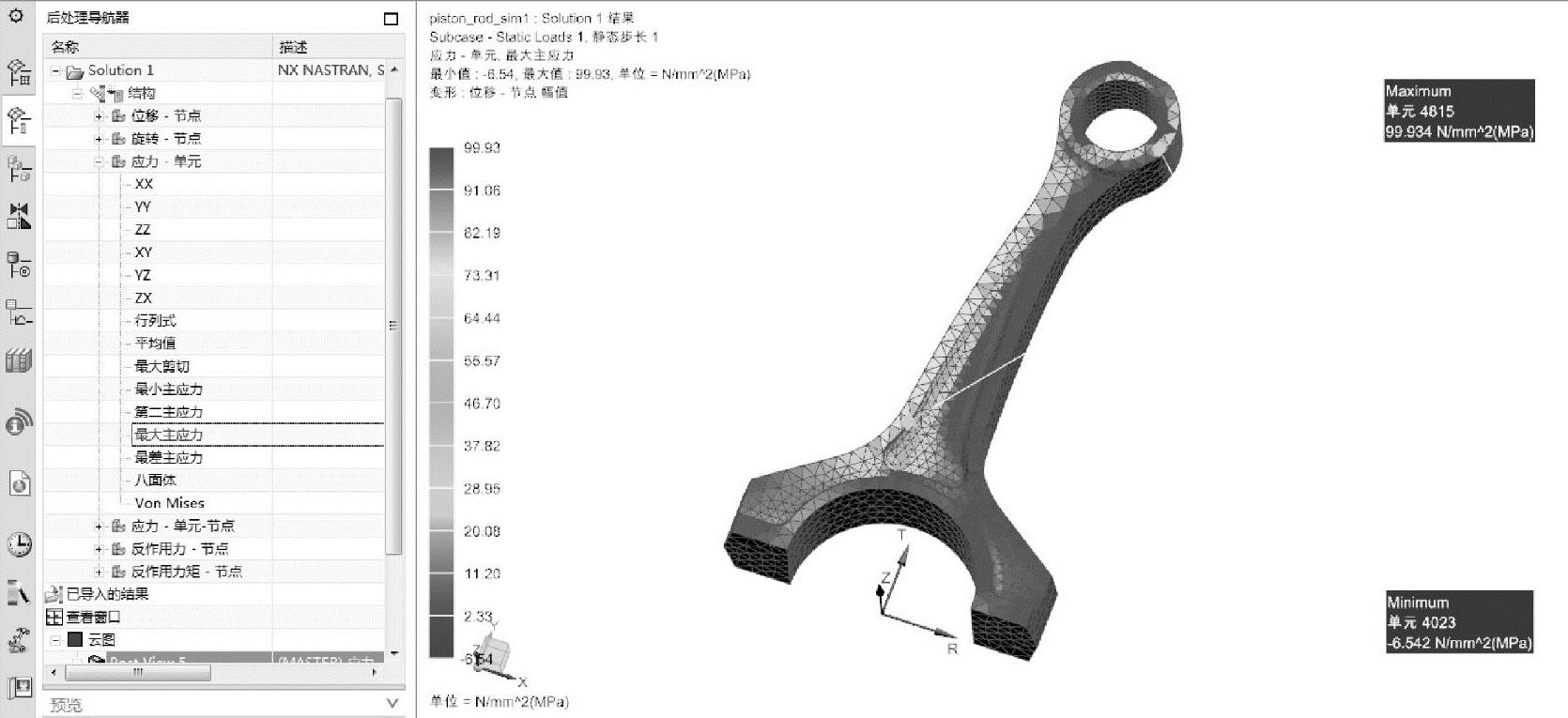
图9-78 查看应力-单元分析结果云图
02 上图是一个静态图,只能看到变形的结果和数据。如果想动态显示整个变形过程,则在【结果】选项卡的【动画】面板中单击【动画】按钮 ,打开【动画】对话框。
,打开【动画】对话框。
03 勾选【完整循环】复选框,单击【播放】按钮 ,可以动态显示在X轴与Y轴方向的拉伸和扭曲变形效果,如图9-79所示。这个变形也是在预设的极限值下完成的。
,可以动态显示在X轴与Y轴方向的拉伸和扭曲变形效果,如图9-79所示。这个变形也是在预设的极限值下完成的。
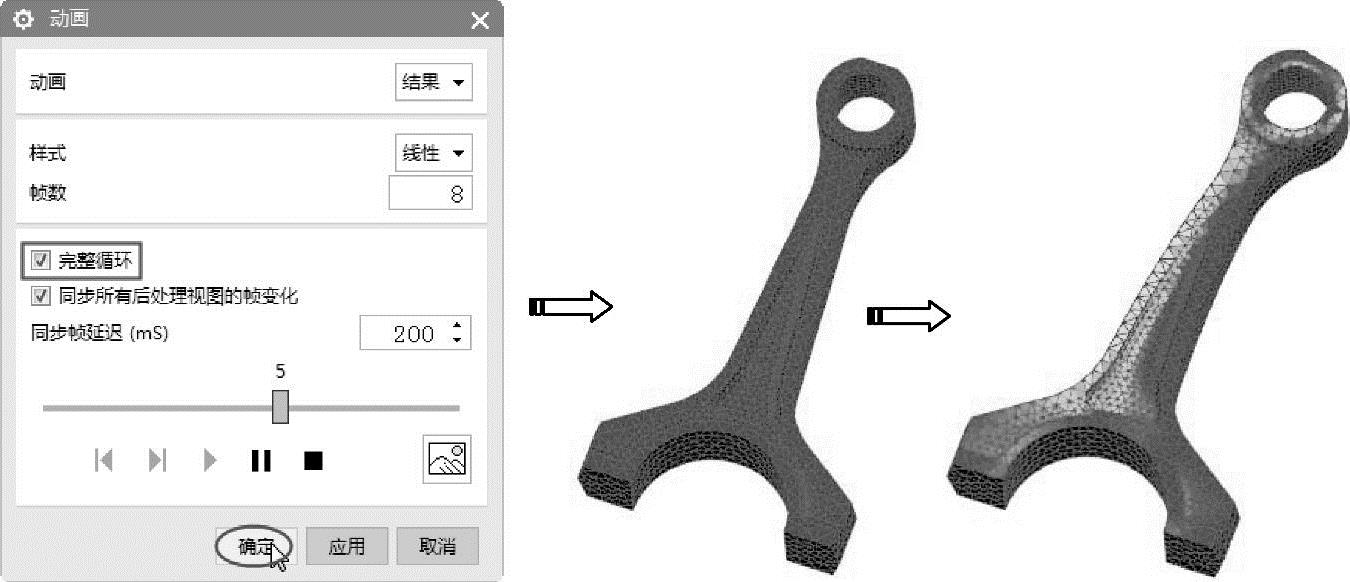
图9-79 动态显示曲柄连杆的变形
04 最后把本例有限元分析的结果保存。至此,完成曲柄连杆零件的线性静态分析。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。