



6kV高压变频器装置系统控制软件的编制遵循模块化结构设计、模块间可自由组态的基本思想。在模块化软件设计中,该高压变频器的所有功能都划分在一定的功能模块中,包括开环(闭环)控制功能、通信功能以及监控和操作器控制功能等,均由软件中的功能模块实现。这些功能模块相对独立,可通过参数设置而自由联结。这种相互联结的方法相当于将各个功能模块用工程方法进行电气连接,即相当于用导线连接集成电路或其他元件。因此,各个功能模块都有自己相应的功能框图,以说明该模块要实现的功能和输入输出连接方式。
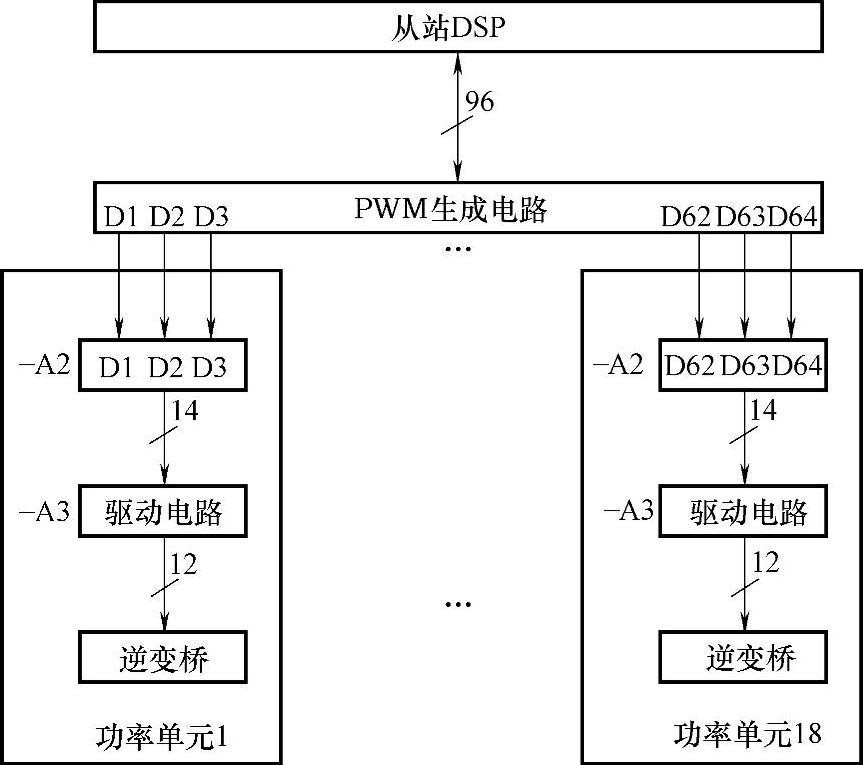
图8-7 PWM信号生成示意图
-A2:PWM信号译码及功率单元状态编码电路;-A3:IGBT驱动电路
在该系统软件的所有功能按模块化软件设计完成后,尤其在每个功能均划分在各自的功能块之后,由于功能块都具有根据参数设置可自由连接的功能,这就为实现系统组态功能奠定了基础。如果把各个功能模块看成是一个个不同的积木块,那么,完成系统组态就像搭建积木一样简单。因此,该系统的组态功能就是指在同一套控制软件中,包含现有的多种控制方式的所有功能块,同一台变频器在不同场合下使用时,只需要通过参数设置组态成一种适合的控制方式,变频器就可以实现相应组态的控制模式。例如,在风机、水泵等对动态性能要求不高的场合,选用U/f控制模式即可,这样,通过参数设置可将系统组态为U/f控制模式,即可满足需求。
1.从DSP承担的主要控制功能
从DSP需完成所有控制功能、故障检测处理功能和通信功能。为提高效率,从DSP的软件用汇编语言编写完成。软件采用模块化设计,每种功能均划分为相应的功能块,为保证所有功能块均能在指定的时隙内完成,将控制软件分成主程序、PWM调制模块及所有其他控制功能块三部分。其中,主程序完成初始化、参数搬移并自检、参数保存、参数恢复工厂设定值、故障历史记录处理等任务,这些任务对执行的时间没有特殊要求,因此这些功能块的时隙不可设;PWM调制模块对时间要求最高,因此安排在优先级最高且最快的中断Ts中,所有其他控制功能块(例如:开关量输入/开关量输出、模拟量输入/模拟量输出、控制字/状态字、给定通道设定、给定积分器、定子电流分解、最大电流限制、U/f曲线、顺序控制、通信、信息、故障诊断、故障综合、电动电位器、工艺调节器、瞬时停电再起动等)安排在次级的中断T0中,通过调整中断的时间,可调整功能块的时隙。为了便于读者理解,下面分别对从DSP其中的主要功能模块进行介绍。
1)顺序控制
每种设备均有其特定的操作规程,特别是对高压变频器而言,其输入输出都是3~10kV的高压,设备较贵重。为了保障人生和设备的安全,高压变频器必须按一定的操作顺序运行,在违反操作顺序的误操作情况下,变频器应该具有识别并防止错误发生的功能,亦即顺序控制所承担的功能。顺序控制需保证变频器起动、运行及停车等按正确的逻辑进行,并检测故障信息,保证变频器能够在故障时立即停止运行并跳闸。
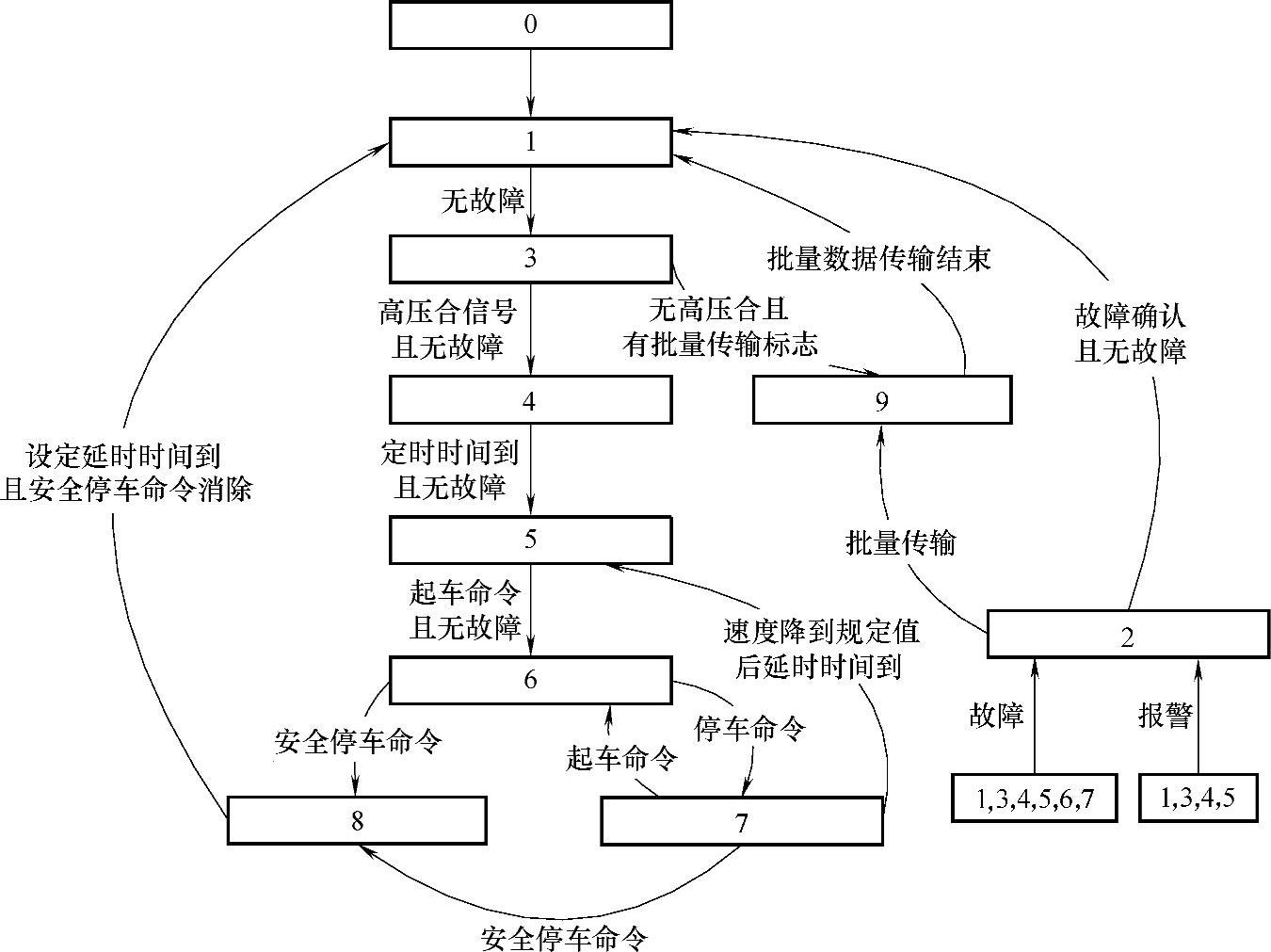
图8-8 变频器状态转换关系图
为正确执行顺序控制,该系统将高压变频器运行的所有过程(包括故障)分成了10种状态:①初始化工作状态、②禁止合闸状态、③故障报警状态、④允许合闸状态、⑤预充电状态、⑥允许起车状态、⑦运行状态、⑧正常停车状态、⑨安全停车状态、⑩批量数据传输状态,并且分别编号为状态0~9。图8-8给出了高压变频器10种状态之间的转换关系图,即各种状态之间的逻辑转换关系,它集中体现了高压变频器的操作顺序。
在程序设计时,先判别当前的状态r001,然后进入在这种状态下的相应逻辑处理,如图8-9给出的顺序控制功能块程序流程框图。在各个状态中均有其相应的逻辑处理功能,这些逻辑是根据状态和操作要求而确定的,不满足相应逻辑的误操作,将得不到响应,以此保证顺序功能的正确执行。
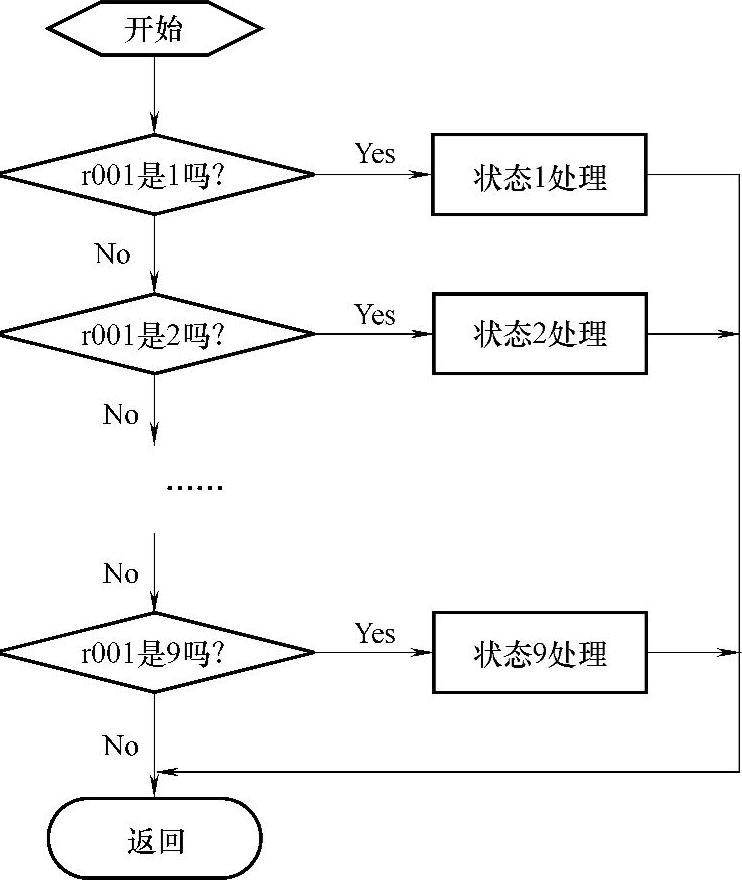
图8-9 顺序控制功能块程序流程图
2)U/f曲线
U/f曲线是U/f控制方式的核心部分,U/f曲线设置是否恰当,直接关系到电机运行性能的好坏。如果完全靠人工通过参数来设计确定U/f曲线,很难达到在任何场合、任何负载下、特别是在低速段有好的性能。在系统中使用了U/f计算模块,可显著减少人工参与U/f设置的程度,提高了电机运行的性能。
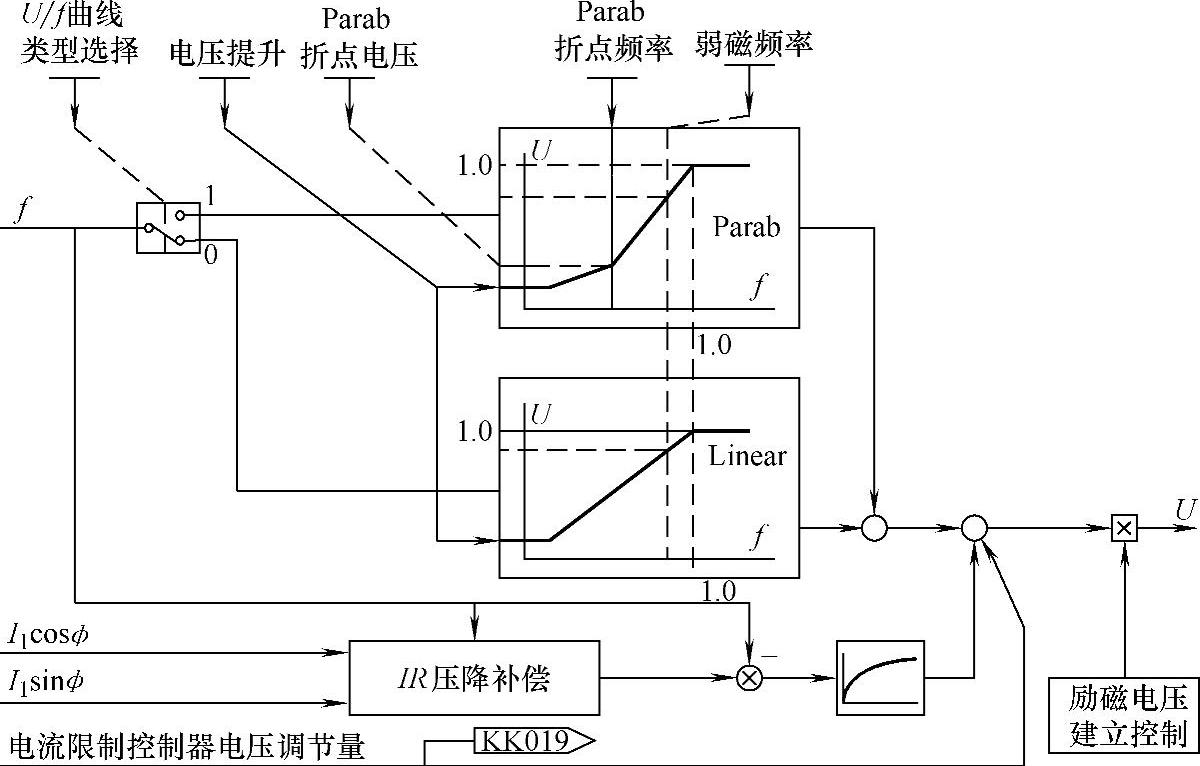
图8-10 U/f曲线功能块简化
图8-10所示为U/f曲线功能块的简化图,图中包含了U/f曲线的基本内容。
系统设立了两类U/f曲线,即线性和二次曲线型,以满足不同工况下的需求。由于所有计算都是标幺化计算,因此,两种类型的U/f曲线均得到了简化,对线性U/f曲线而言,它是斜率为1的直线;对于二次曲线型的U/f曲线,使用折线的方法来替代。由图8-10可见,装置对U/f曲线的设置非常简单,线性的U/f曲线只需设置电压提升值,为电机提供起动转矩;二次曲线型的U/f曲线除设置电压提升值外,只需设置曲线的折点(电压、频率)。
3)给定积分器
U/f控制方式中,不能使阶跃信号直接加到U/f曲线上,否则供给电机的电压和频率就是阶跃的,将造成很大的冲击电流,为避免这种情况的发生,必须在频率给定通道中加入给定积分器,使阶跃的频率给定按指定的斜率上升,以达到减少冲击的目的。
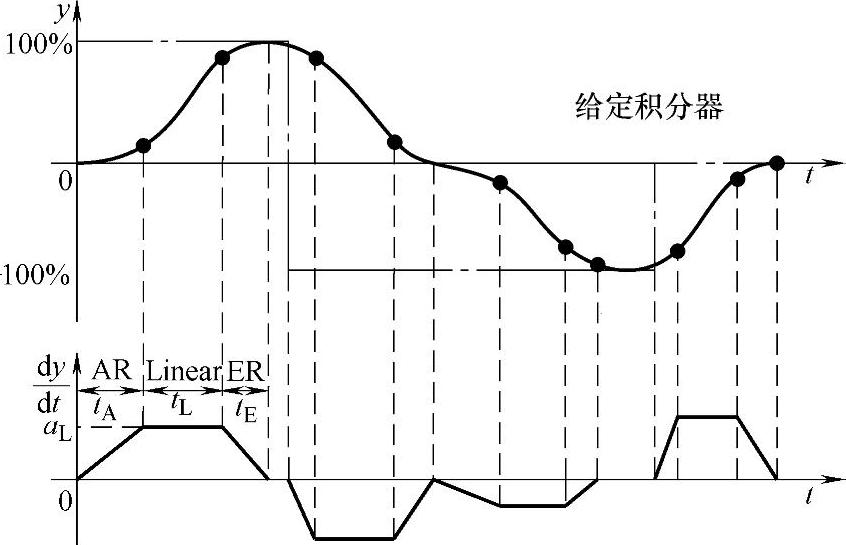
图8-11 “S”形加减速曲线图
对于DSP数字控制系统,应采用性能较好的“S”形曲线以实现电机的加减速。这里介绍一种可以通过参数任意设置加减速时间、圆弧时间,在任何给定频率下均能实现指定的“S”形加减速曲线的给定积分器。它在指定加减速过程中,如果系统要求更改目标频率,也能自动按“S”形曲线达到新的目标频率,甚至对于频率从正给定变到负给定或是相反的情况,也能实现满足要求的“S”形加减速曲线。图8-11给出了所要实现的“S”形加减速曲线图。
这里以正向加速段为例,分析其实现原理。如图8-11所示,将正向加速段分为三个小段:正向加速起始圆弧段AR、正向加速线性段Linear和正向加速结束圆弧段ER。计算“S”形加速曲线的原则为,先计算出dy/dt-t坐标图中的AR、Lin-ear和ER三个段内的曲线,然后对该曲线进行积分计算,即可得到y-t坐标图中相应时间段的“S”形曲线,这是真正的数字积分的算法,计算出的“S”形曲线的加速度一定是连续变化的。
加速时间定义为从0加速到100%的时间,减速时间定义为从100%减速到0的时间,它们实际上规定了相应的线性段Linear的加速度,即有

式中 tacc——加速时间。
根据aL的值再分别计算AR段和ER段的加速度值,它们的表达式分别为

 (https://www.xing528.com)
(https://www.xing528.com)
在实际计算中,对加速度曲线的积分是通过计算加速度曲线的面积,因此并不要求知道确切的加速度数学表达式。图8-12所示为实验测得的“S”形加减速曲线和加速度曲线。
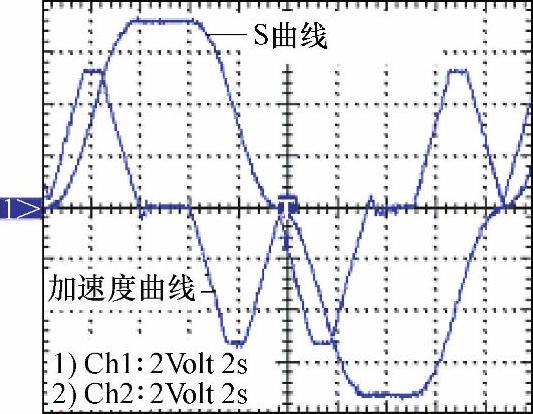
图8-12 实测的“S”形曲线和加速度曲线
2.主DSP承担的监控功能
主DSP主要完成高压变频器的参数设置、运行控制、状态显示、实时监控等功能。为实现这些功能就必须具有监控画面,操作命令选择画面,系统参数设置画面,故障纪录画面等。图8-13所示为高压变频器运行监控画面。
主DSP软件共由五个模块组成,各模块的功能如下:
①主程序模块TEST.C——完成DSP初始化,自定义程序段搬移,参数值初始化,故障记录初始化,ST16552自检,ST16552初始化,LCD初始化,显示欢迎画面,转入监测画面,恢复工厂设置,以及处理一些特殊情况等功能。
②键盘中断(INT3)服务程序模块KEYBOARD.C——完成转入监测画面后,对键盘操作的响应功能。
③Timer0中断服务程序模块——定时通信服务程序,定时刷新监测画面或r参数画面。
④485中断服务程序模块——完成任务报文发送,接收响应报文,处理响应报文,处理串行化出错和FIFO超时中断。
⑤Timer1中断服务程序模块——完成时钟功能。
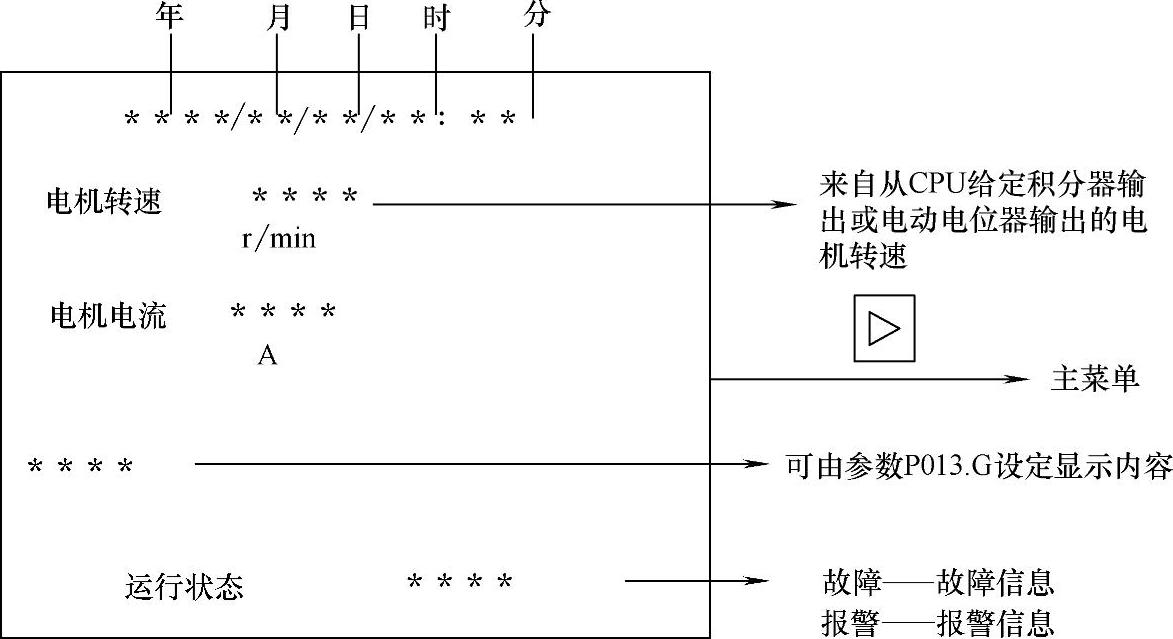
图8-13 高压变频器运行监控画面
3.主从DSP之间的通信功能
随着变频器的普及,无论是通用变频器还是高压变频器,都有在异地进行远程控制,或是多台变频器由一台主机控制协调工作的需求。因此,通信功能是系统设计中不可缺少的一部分。系统的主控板和显示控制板之间采用RS485通信接口,显示控制板还预留一个RS232接口和上位机通信,主控板预留一个RS485接口和现场总线通信。这里所指的通信是主、从DSP之间的通信。
6kV高压变频器的系统采用SiemensUSS协议,为主从结构的协议,从站变频器只是对主站发来的任务报文做出响应并发送响应报文。USS协议具有以下特征:
•支持多点连接(如EIARS485)或点对点连接(如EIARS232);
•主从存取方法;
•单主站系统;
•最多32个站(最多31个从站);
•与Pofibus相似的总线操作模式;
•信息传送到传动装置的方式与Profibus—DP相同。
其中,USS协议的数据报文如下:

STX区域是一个单字节的ASCIISTX字符(02H),表示一个报文的开始;LEG是一个单字节区域,表示在这个报文中LEG区域后的字节数;ADR是一个单字节区域,包含从站变频器的地址;通信传输的信息将置于净数据区中,包含PKW区和PZD区,PKW区用于参数标志值(PKW)接口的控制,它不是一个物理接口,而是处理两个通信部件之间参数传递的机构,其中包含了参数值的读写,读取参数注释及相关电文,借助于PKW进行的所有工作均涉及操作控制、观测、维护以及诊断;PZD区域包含自动化系统所需的信号,即主站给从站的控制字和给定值,从站给主站的状态字和实际值。
根据本系统的通信需要,设计了如下的通信协议:
任务报文格式

响应报文格式

在上述协议下,高压变频器系统完成的通信任务,包括参数设定值和显示值的传送;控制、操作命令的下达;故障显示及确认,历史故障显示;批量数据传输(所有参数上载和下载)等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。