



我国近年的道路交通事故数据表明,超速行驶是道路交通事故发生的首要原因,也是加重事故后果的最直接原因。车辆肇事时行驶速度的确定,是道路交通事故案件事实中的重要部分。比较准确地判断道路交通事故发生时肇事车辆速度是道路交通事故技术鉴定中最常见的,也是难度较大的技术鉴定。
(一)车辆行驶速度技术鉴定的要求
1)鉴定应当依法进行。
2)鉴定机构(鉴定人)应具备相应的资质,并在省级人民政府公安机关交通管理部门备案。
3)鉴定委托单位应向鉴定机构(鉴定人)出具车辆行驶速度鉴定委托书,鉴定委托书应符合GA40—2008的要求。并提供交通事故现场图、勘查笔录等现场勘查相关材料。
4)鉴定机构(鉴定人)认为有必要勘验交通事故现场和事故车辆的,鉴定委托单位应予协助。
5)鉴定机构(鉴定人)应出具车辆行驶速度鉴定书,鉴定书应符合GA 40—2008的要求。
(二)鉴定方法
道路交通事故成因复杂,事故形态各异,车辆碰撞过程中的运动形式也非常复杂,有平动、伴有转动、翻滚产生变形。我们必须将问题简化,应视事故的具体情况,找出主要因素,略去无关大局的次要因素,用某种理想的模型来代替实际事物。例如,在某些事故中,若车辆的大小形状对运动过程结果影响极小,可考虑将车辆简化为质点;若车辆的变形对结果影响非常小,把变形因素考虑进去会使问题变得十分复杂,为简化问题,可以把变形因素略去,将车辆简化为刚体。这样,物理和数学中的经典定义、定理、定律和模型就可以有选择地应用到道路交通事故速度鉴定中。另外,道路交通事故车辆相互撞击本身就是一个力学问题,因此,要用力学的思想结合国内外碰撞试验总结的经验公式去解决车辆碰撞时的速度问题。
1.相关物理、数学模型在道路交通事故车速鉴定中的应用
(1)直线运动公式在车速鉴定中的应用 直线运动包括匀速直线运动、匀变速直线运动和变速直线运动三种,公式虽然简单,但在道路交通事故车速鉴定中却可以解决很多问题。
匀速直线运动公式利用距离、速度、时间三者之间的函数关系,可以解决在一起事故中驾驶人没有采取任何措施而发生碰撞的原因,即用来确定驾驶人发现被撞物后,是否有反应时间来采取措施。
匀变速直线运动公式利用距离、速度、时间、加(减)速度四者之间的函数关系相互转换,利用速位公式结合车辆拖痕印迹求车辆制动前的速度等。
变速直线运动中加速度不是常量,但在道路交通事故中加速度是时间的函数。可利用积分分别建立速度与时间的函数关系,位移与时间的函数关系,最后确定速度与位移的函数关系式(8-1),可以解决车辆原地急加速起车后,发生事故时的速度。

(2)动能定理在车速鉴定中的应用 所谓动能定理,即合外力做功等于物体动能的增量。在道路交通事故中,利用动能定理结合肇事车制动印迹长度可推算制动前的车速。
汽车制动时,当车轮抱死时,汽车将沿着行驶方向在路面上滑移。此时,汽车所具有的动能将主要消耗于车轮与路面之间的摩擦,根据初动能转化为附着力做功: 得到
得到
考虑到道路纵坡度的影响,依据功能原理有:
式中 m——汽车质量(kg);
v——汽车制动滑移前的车速,即制动车速(m/s,乘3.6转化为km/h);
L——制动印迹长度(m);
φ——轮胎与路面的附着系数;
i——道路纵坡坡度,下坡取负值,上坡取正值;
g——重力加速度(9.8m/s2)。
由此可得根据制动印迹长度推算制动车速的基本公式为

(3)抛体公式借助抛落物体推算碰撞车速 车辆在碰撞瞬间,车体上的易碎构件或物体可能碎裂、松脱并受惯性力的作用向车辆行驶方向抛出。此时,如果测出抛落物体的飞行距离和它原来在车辆上的位置高度,则可根据抛物体的运动规律来推算车辆在碰撞瞬间的车速,即碰撞车速。
如图8-1所示,抛落物从车上高度H处向车前飞出,飞行L后落到地面,则碰撞车速可按下式计算:

式中 v——碰撞车速(m/s,乘3.6转化为km/h);
H——抛落物原位置高度(m);
L——抛落物飞行距离(m);
g——重力加速度(9.8m/s2)。
现场测量飞行距离L时,应确定车辆碰撞接触点的位置和散落物坠地位置。一般抛得越远的散落物,其抛出速度越接近车辆碰撞前的速度。因此,在同类散落物中,应以抛得最远的散落物为准。但是,若非塑性路面,散落物落地之后还会向前滚动或滑动一段距离,而导致误差。解决办法是利用从汽车不同高度抛出的两个散落物(例如前车窗和车灯抛出的碎玻璃)来进行比较。同一台车,两个散落物抛出的速度相同,落地后滑出的距离也相同设为ΔL(m),风窗玻璃和车灯玻璃在碰撞点的飞行距离分别为L1(m)和L2(m),破碎的风窗与车灯在车上的原始高度分别为h1、h2(m)。那么,两物体的平抛公式为

两式相减,得
解出

式中 v——碰撞车速(m/s,乘3.6转化为km/h);
ΔL——两个散落物抛出落地后滑出的距离(m);
h1、h2——分别为破碎的风窗与车灯在车上的原始高度(m)。
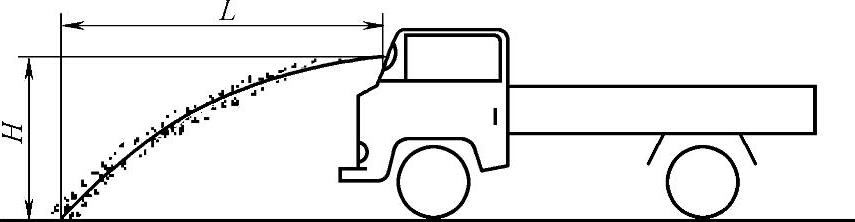
图8-1 从车上碎裂的抛落物
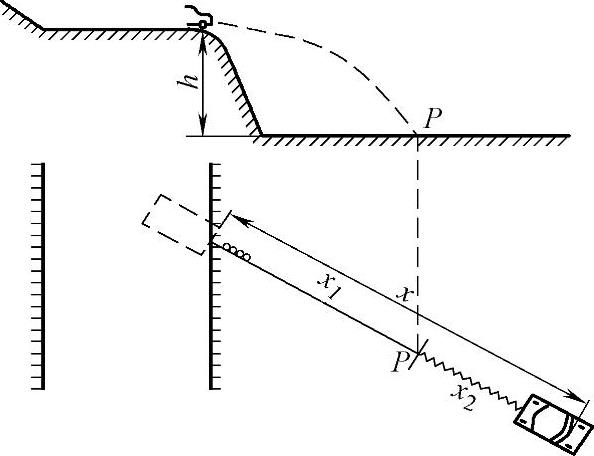
图8-2 路外坠车示意图
(4)抛体公式推算单车坠崖(坠车)车速 行驶在山区公路上的长途汽车,常常因驾驶人疲劳驾驶或车辆机械故障等原因而飞出路外,坠落到山脚下,造成特大事故。对于这种情况,可以按两种情况来分析计算:
一种,若能找到车轮坠落点P(见图8-2),并测量得到它的水平距离x1和高差h,就可按抛物线计算:
联立上述两式消去时间t,得到

另一种,若找不到坠落点P的位置,但能测量得到停车位置总的水平距离x和高差h及车辆落下后与地面间的滑动摩擦系数μ。那么可以由
相加得
这是v抛的二次方程,有两个解,其中有用的一个解为

式(8-7)也可以用于求解人被车辆撞击抛出落地后,翻滚、滑行找不到落地点时车辆的撞击速度。
(5)离心力在车速鉴定中的应用 当车辆在圆曲线线形的弯道处制动发生侧滑或侧翻时,可根据侧滑或侧翻时制动轨迹估算制动初速度。只要能测出侧滑或侧翻时制动轨迹的曲率半径,就能估算出制动初速度。
1)道路外侧不设超高时车辆侧滑的临界速度v滑的求解。
图8-3为在弯道上行驶的车辆的横剖面,假定道路外侧未设超高。设整车重量为G,弯道曲率半径为R,那么作用在整车质心C上的惯性离心力 等于质量乘转弯时的向心加速度,即
等于质量乘转弯时的向心加速度,即
随着车速v的增加,惯性离心力迅速增加,当它达到轮胎与路面间横向最大摩擦力Fy时,路面上出现侧滑的印迹,此时的车速称为侧滑时的临界速度,用v滑表示,于是可根据
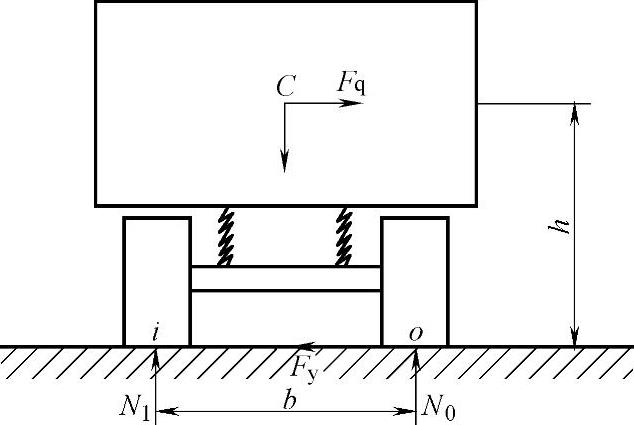
图8-3 弯道外侧无超高时的车辆受力图

所以侧滑的临界速度为

式中,φs为整车横向的附着系数,横滑附着系数φs与纵滑附着系数φ的关系为
φs=0.97×φ+0.08 (8-9)
2)道路外侧不设超高侧翻时的临界速度v翻的求解。
如图8-3所示,当整车重心高度h比较大,两轮间距b比较小时,随着车速v的增加,可能先发生侧翻,而不是先侧滑。侧翻的临界条件是离心惯性力引起的倾覆力矩Fg·h大于或等于重力的稳定力矩G·(b/2),即
所以侧翻的临界速度为

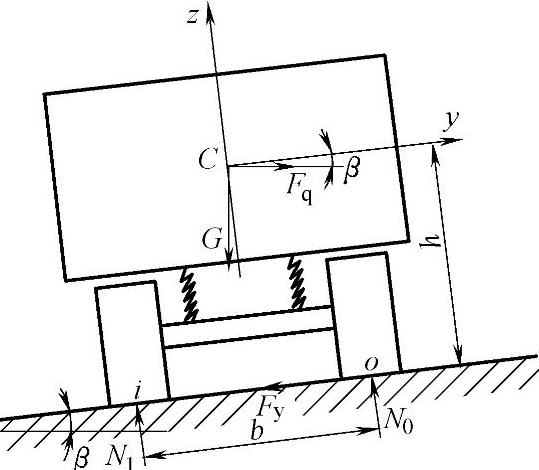
图8-4 弯道外侧有超高时的车辆受力图
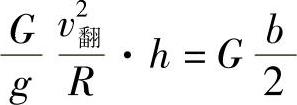
3)道路外侧设超高时车辆侧滑与侧翻的临界速度的求解。
上述侧滑和侧翻临界速度公式中没有考虑道路外侧超高因素。假设弯道横断面有外侧超高,如图8-4所示,内倾角β的正切称为超高的横向坡度iy,即
iy=tanβ
那么车辆侧滑的临界速度为

车辆侧翻的临界速度为

从这两个计算式中不难看出,路面横断面有外侧超高(iy>0)时,两个临界速度都增大,车辆行驶的稳定性提高。不过若某处路面有反超高(iy<0)时,两个临界速度都减小,车辆行驶的稳定性降低。
(6)车辆制动拖滑一段距离后,遇挡跳跃抛出时车速的推算 车辆在道路行驶遇到紧急情况时采取制动措施,拖滑或侧滑一段距离后,碰撞比其质心低一些的坚固物体时,若速度足够大,则将在碰撞点处遇挡,以一定角度跳跃抛出。
按抛物线计算公式
联立上述两式消去时间t,得到

又由抛体运动规律可知,对一定的抛出距离,抛射角为45°时,所需速度最小。在道路交通事故车速鉴定中,往往需要最小速度作为证据。因此,将α=45°代入上式,求得在跳跃事故中,车辆遇档抛出时的最小速度,即

式中 v抛——最低抛出速度(km/h);
s——水平抛出距离(m);
h——垂直升高或落下距离(m),升高时取负值,落下时取正值。
如果车辆离去和落地时的质心位置在同一水平面上,则式(8-12)可简化为

设肇事车辆跳跃抛出前拖滑或侧滑距离为L(m),则肇事车辆制动前的初始速度v根据动能定理

有

式中 v——肇事车辆制动前的初始速度(km/h);
L——跳跃抛出前拖滑或侧滑距离(m);
φ——纵向拖滑时为纵向附着系数,侧滑时为横向附着系数;
i——道路坡度。
(7)根据塑性变形的经验公式计算碰撞前的速度v0 据国外资料介绍,由多种轿车碰撞固定壁实验结果归纳出塑性变形量x与碰撞速度存在线性比例关系,原则上可分两种情况:
当轿车正面碰撞固定壁时
v0=105.3x (8-16)
当轿车头部碰撞树、杆、柱等固定物时
v0=67x (8-17)
式中 x——轿车头部塑性变形深度(m),可在肇事车辆破损平面上多取一些测量点,测量到前保险杠立面的距离,取平均值;
v0——碰撞初瞬时轿车的速度(km/h)。
(8)肇事车斜向碰撞防护栏 当车辆方向失控时,斜向撞击防护栏或其他障壁上,并且经过折射反弹停下。如图8-5所示,设碰撞前车速为 ,其方向与护栏的夹角为θ0(称为入射角)。碰撞后反弹的速度为
,其方向与护栏的夹角为θ0(称为入射角)。碰撞后反弹的速度为 ,其方向与护栏的夹角为θ(称为反射角),Pn、Pτ分别为法向和切向上的冲量。由于不是正向碰撞,用车头塑性变形计算车速的经验公式不适用。可以采用法向弹性恢复系数法:
,其方向与护栏的夹角为θ(称为反射角),Pn、Pτ分别为法向和切向上的冲量。由于不是正向碰撞,用车头塑性变形计算车速的经验公式不适用。可以采用法向弹性恢复系数法:
法向弹性恢复系数e,即碰撞后速度的法向分量vn与碰撞前速度的法向分量von之比

所以

当防护栏的刚性不大时,弹性恢复系数k可以达到0.5以上,一般取0.5或0.5~1的中值0.75。通常情况下,反射角θ小于入射角θ0,但也可能出现相反的情况,这是因为防护栏切向摩擦力冲量比较大,使切向速度分量因摩擦而减少的程度超过法向速度分量减少的程度。
在此种情形事故中,式(8-19)中入射角θ0、反射角θ的确定,可根据事故现场路面印迹结合车辆和防护栏的撞击部位,还原、再现车辆撞击防护栏前、中、后的位置,利用CAD绘制道路交通事故再现图,并量出入射角θ0、反射角θ的角度。
反弹速度v可根据肇事车辆撞击防护栏后,折射反弹时在路面留下的印迹长度,根据动能定理利用式(8-2)求出。
图8-5 单车斜向碰撞防护栏
2.道路交通事故力学分析
(1)被撞击车辆的一般运动 在碰撞过程中,汽车的损坏仅限于相撞部位,而其他大部分仍然完好,故可将汽车视为刚体。将汽车作为刚体处理,可简化分析和计算。
用刚体的质心运动定理来描述车辆的运动规律。刚体的质心运动定理,即刚体在受到外力作用时,不管形状、结构如何复杂,也不管外力作用点在刚体的什么位置,刚体质心的运动就像是刚体的全部质量都集中于质心,而所有的外力也都作用于这一点一样。刚体的质心运动定理在道路交通事故速度鉴定中可以解决两个问题。
一是确定被撞击车辆的运动轨迹。若车辆被撞击后,处于自由无约束状态,即不与其他车辆或物体发生二次碰撞,驾驶人不操作转向盘且无外力干扰,那么,车辆质心的运动轨迹一定是一条直线,且沿着受力方向。在某些道路交通事故中,车辆被撞击后符合上述条件,但车辆在路面留下的印迹却不是直线,是弧线或更为复杂的交错弧线。这说明车辆运动中,围绕质心是有旋转的,但车辆质心运动轨迹一定是沿受力方向的直线。
二是求解车辆有旋转的碰撞速度。车辆被撞击后运动一段距离后停止,根据动能定理,碰撞速度产生的动能包括平动动能(用被撞车从碰撞点直线拖滑到停车位置摩擦力做功表示)和转动动能,即

式中 v——被撞击车辆运动速度(m/s);
L——被撞车在碰撞点和最终停车两位置质心连线(m);
J——被撞车转动惯量;
ω——被撞车转动角速度。
因转动惯量无法量化,转动动能也无法求出,只能通过修正平动距离来保证计算结果的准确性。一般取4个轮胎在路面留下的平均印迹长度,来代替上述L值。在某种特定情况下,例如车辆旋转180°实测平均印迹长度是两位置质心连线L的1.3倍。上式修正为

(2)交通事故的力学特点 道路交通事故大部分是汽车与汽车或汽车与其他物体发生碰撞而引起的。从力学观点分析汽车碰撞现象,可发现它具有其他物体碰撞中所不同的特征,这是分析汽车各类碰撞事故的基础。下面介绍几个与汽车碰撞有关的概念。
1)恢复系数。汽车碰撞过程是汽车与汽车或与其他物体相互接触,并在接触瞬间进行能量交换的过程。在这个过程中,碰撞车辆发生变形,变形量像弹簧一样有恢复的趋势,但又不同于弹簧而无法完全恢复。这属于“非完全弹性碰撞”。为解决此问题,牛顿引入了一个称为“恢复系数”的量,即两个相互碰撞的物体碰撞前后相对速度的比值。

式中 e——恢复系数;
v1、v2——分别为物体1和物体2在碰撞刚结束后的速度;
v10、v20——分别为物体1和物体2在碰撞前的速度。
显然,弹性碰撞(如橡皮球碰撞墙壁),其碰撞前后相对速度不变,恢复系数e=1;塑性碰撞(如泥巴球碰撞墙壁),碰撞后速度为零,恢复系数e=0。
当汽车以较低的速度互撞或撞刚性固定物时,恢复系数e较大,接近于弹性碰撞;当汽车以较高的速度碰撞时,恢复系数e趋向于零,接近于塑性碰撞。由于在实际的交通事故中,车辆的速度均较高,故可认为汽车碰撞近似于塑性碰撞。
2)有效冲突速度。如图8-7所示,两车相互接近,1车位正方向,则2车为负方向。两车接触后,相互的撞击力使两车相互挤压,变形不断加深,两车的速度不断减小,直至1车的速度为零。随着撞击的深入,1车被2车加速,并向负方向行驶。当两车都达到最大变形量时,两车达到共同速度vc,向负方向行驶。两车在自身企图恢复变形的弹性力作用下逐渐分离,以v1、v2的速度向负方向运动。推敲上述碰撞过程,两车的变形发生在开始接触的零时刻到最大变形的t0时刻之间,形变的大小取决于撞击力。根据动量原理,平均撞击力与动量的改变成正比。在这段时间内,1车的动量改变为m1v10-m1vc,2车的动量改变为m2vc-m2v20。可以看出:决定1车碰撞形变大小的速度是v10-vc;决定2车碰撞形变大小的速度是vc-v20。我们把v10-vc和vc-v20分别定义为1车和2车的有效冲突速度,用ve表示:

式(8-23)是碰撞中机动车的有效冲突速度定义,虽是正面碰撞导出,但对于尾撞同样适用。为获取有效冲突速度表达式,必须确定vc的大小。可根据动量守恒,利用两车碰撞开始时系统的总动量等于两车达到最大形变量时(即达到共同速度vc时)系统的总动量。即
m1v10+m2v20=(m1+m2)vc
由此得出
将上式代入式(8-23),得到
3)弹性恢复系数与有效冲突速度的关系,如图8-6所示。在力学上,恢复系数作为衡量车辆冲突弹塑性的参数,与有效冲突速度存在着某种关系。国外经过大量的实车碰撞试验,表明当有效冲突速度小时,车辆碰撞接近弹性碰撞;随着有效冲突速度加大,车辆碰撞接近塑性冲突,如图8-6所示。
4)车辆冲突中的能量吸收与变形。车辆碰撞过程中,两车的能量吸收及变形量大小与车辆的质量有关。究竟存在何种关系,要利用车辆碰撞的恢复系数和有效冲突速度与汽车质量之间的关系进行确定。
如图8-7所示,两车碰撞前后动量守恒,根据动量守恒定律有
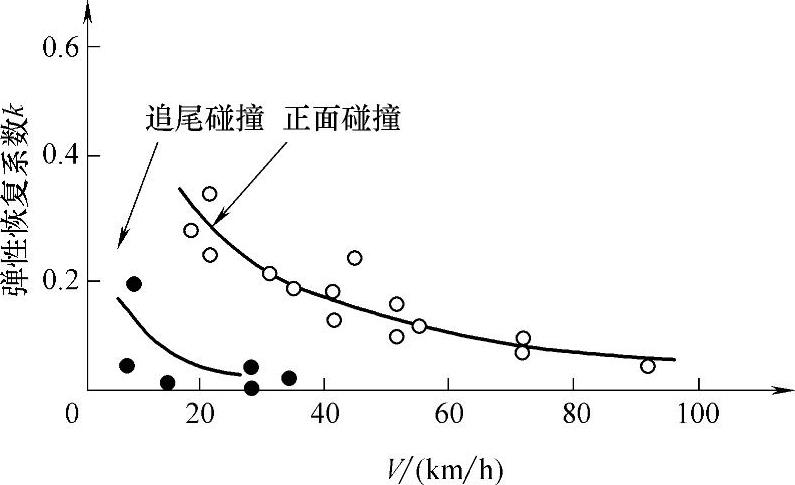
图8-6 弹性恢复系数与有效冲突速度的关系
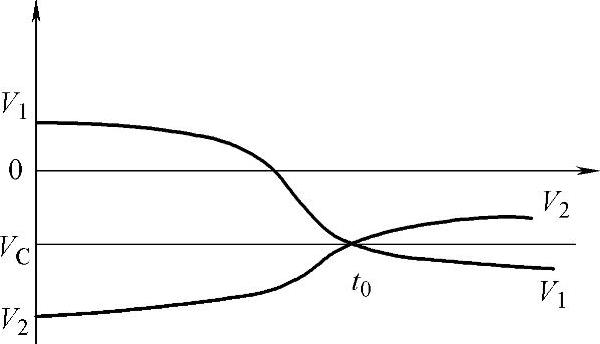
图8-7 恢复系数及有效冲速度定义
m1v1+m2v2=m1v10+m2v20
同时,再根据弹性恢复系数定义:
两式联立解得


上述两式表明,在同一冲突中,恢复系数越大,或者是对方的质量越大,自己的速度变化也越大;在不同冲突中,即使冲突前的速度差完全一样,速度的变化也将随两辆车的质量和恢复系数的不同而不同。
在实际的正面交通冲突中,除车辆速度大小会发生变化外,车辆的速度方向通常也会发生变化,使质量小的车沿着质量大的车的前进方向后退。除完全弹性碰撞外,一般的碰撞过程都伴有能量损失,它转化为热能或其他形式的能。因此,对于两车正面碰撞,能量损失有三种不同的表示方法:
第一种,两车碰撞能量损失等于撞击力做功,则
联立上述三式得

显然,当完全弹性碰撞时,k=1,w=0;完全塑性碰撞时,k=0,能量损失表达为

第二种,把两车碰撞能量损失比作塑性弹簧。
如图8-8所示,把两车碰撞比作塑性弹簧,x1、x2为两弹簧的变形量,K1、K2为两塑性弹簧的弹簧系数,早期国外对不同品牌的小轿车进行大量模拟碰撞试验发现,不同品牌轿车的K虽不同,但单位汽车质量的弹性系数K′都接近一个常量,且为车辆碰撞时的减速度a与变形量x之比,近似等于41.0g/m。对于K′的值,由于不同时期,造车结构设计理念不同、造车材质不同,因此K′的值也不同,现在一般使用855.56/m。

图8-8 两物体正面冲突力学模型
下面研究弹簧系数K与单位汽车质量的弹性系数K′之间的关系。
a=(41.0g/m)x=K′x
F=Kx
F=ma
上三式联立解得
K=mK′ (8-28)
若两弹簧串联,有

将式(8-28)、式(8-29)、式(8-30)联立,得到能量损失的第二种表现形式

第三种,若两车碰撞塑性变形,撞击力做功分别等于两塑性弹簧做功之和。

将车辆碰撞能量损失的三种表示形式,即式(8-27)、式(8-31)、式(8-32)与式(8-24)联立,得出两个重要结论:
第一,两车碰撞时,变形量与质量成反比,即 ;有效碰撞速度ve1和ve2与质量m1 和m2成反比,所以能量吸收与质量的平方成反比,即
;有效碰撞速度ve1和ve2与质量m1 和m2成反比,所以能量吸收与质量的平方成反比,即 。可见,在碰撞事故中,质量小的车受到的伤害大。
。可见,在碰撞事故中,质量小的车受到的伤害大。
第二,同样的有效冲突速度下,正面冲突和对墙冲突中的车体变形是完全相同的,即汽车对墙的有效冲突公式在两车正面碰撞中也完全适用。
即 ;
; 。
。
3.一维碰撞事故求解
两车一维碰撞也叫直线碰撞,它是指碰撞前后两车质心始终保持在同一直线上。只要用一个坐标轴就能描述两车的碰撞过程。它一定是对心碰撞,而不是偏心碰撞;它一定与碰撞面正交,而不是斜交,它也不能与车辆侧面相撞,而只能是正面对正面或正面对后面(追尾)碰撞。因此,一维碰撞包含两车正面碰撞和追尾碰撞两种。
(1)一维正面碰撞 两车一维正面碰撞过程中,碰撞前有两个速度v10和v20,碰撞后也有两个速度v1和v2。可以通过碰撞后两车在路面留下的印迹,运用动能定理算出碰撞后两车速度v1和v2,结合车辆变形与有效冲突速度的关系,反过来推算碰撞前的速度。如图8-6所示,两车沿x轴一维正碰撞。为了使得推导的公式具有一般性,假定碰撞前后两车速度 、
、 、
、 、
、 的方向都沿x轴正向,于是把动量守恒定理投影在x轴上,得
的方向都沿x轴正向,于是把动量守恒定理投影在x轴上,得
m1v1+m2v2=m1v10+m2v20 (8-33)
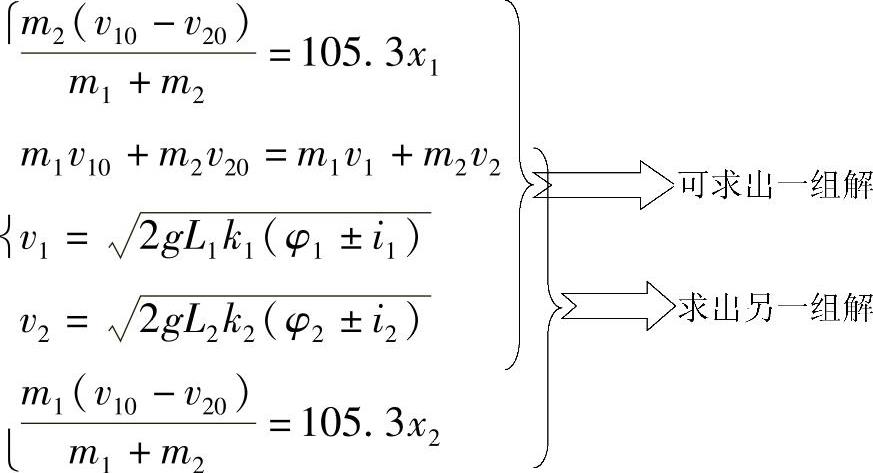
据国外资料介绍,由多种轿车碰撞固定壁实验结果归纳出塑性变形量x与碰撞速度存在线性比例关系,即v0=105.3x。有学者研究表明,同样的有效冲突速度下,正面冲突和对墙冲突中的车体变形是完全相同的,即汽车对墙的有效冲突公式在两车正面碰撞中,也完全适用。轿车头部塑性变形平均深度,与该车的有效冲突速度ve的关系如下:(https://www.xing528.com)
ve1=105.3x1 (8-34)
ve2=105.3x2 (8-35)
1车和2车的有效碰撞速度ve1和ve2定义为
两车在路面留下的印迹运用动能定理算出碰撞后两车的速度v1和v2


将上述公式整合后,即可求解一维碰撞初始速度v10和v20的值,整合如下:
式中 m1、m2——车辆1、车辆2的质量(㎏);
L1、L2——车辆1和车辆2冲突后滑移的距离(m);
φ1、φ2——车辆1、车辆2滑移时的纵向附着系数;
i1、i2——车辆1、车辆2行驶路段纵坡坡度,下坡取负值,上坡取正值;
k1、k2——附着系数修正值,全轮制动时k=1,只有单轴制动k取轴数分之一;
x1、x2——车辆1、车辆2冲突后的变形量(m)。
可见,在两车正面冲突中,只要量出两车碰撞后各自的变形量,按上述方程组可求出两组碰撞初速度。两车正面碰撞时的初速度真值应在两组计算值之间。
(2)一维追尾碰撞 追尾碰撞与正面碰撞都是一维碰撞,正面冲突中求解的方法一样适用于尾撞冲突,但追尾碰撞与正面碰撞相比有以下不同。
一是,被撞的轿车尾部刚度较小,碰撞时塑性变形很大,弹性变形可以忽略不计,弹性恢复系数k趋于零。图8-7就是两轿车碰撞时弹性恢复系数k与有效碰撞速度ve的函数关系。图中显示对于追尾碰撞,当有效碰撞速度ve>20(km/h)时,弹性恢复系数几乎等于零。
二是,两车追尾碰撞时,后面的冲撞车在碰撞前后一般都有制动拖印,但前面的被撞车的印迹形成比较复杂。有因被快速推动而来不及滚动,拖滑形成的;还有因紧急制动被追尾形成的;也有被撞后,滚动一段距离停车,没有形成印迹的。计算形式比较复杂。
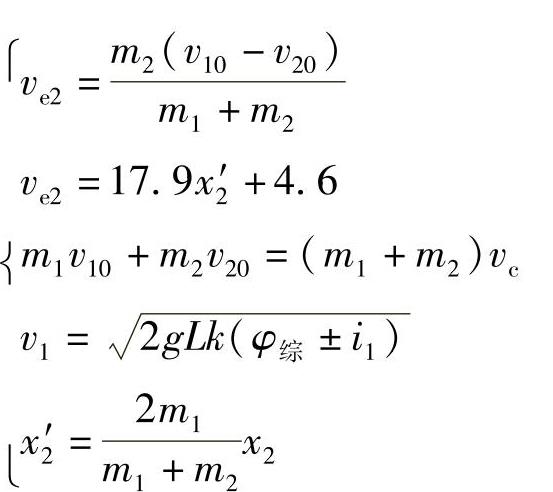
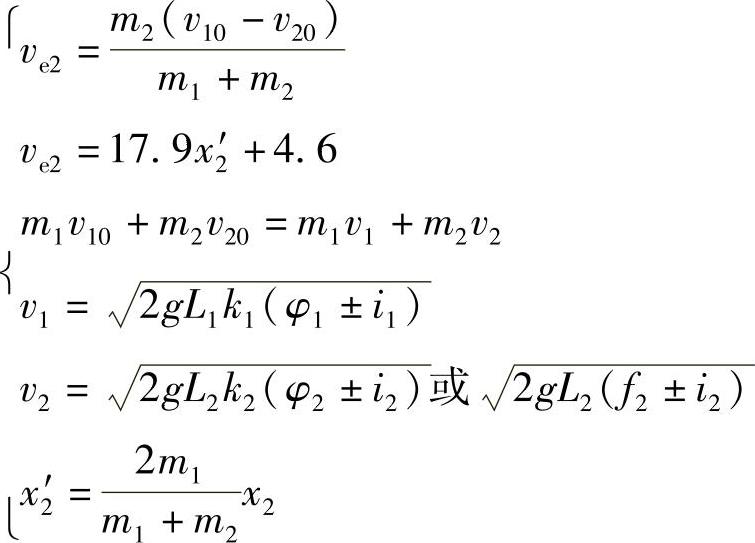
三是,被撞车尾部的塑性变形平均深度x2与有效碰撞速度ve2的关系,在有效冲突速度小于32km/h时,存在下述关系:
ve2=17.9x2′+4.6 (8-40)

式(8-41)为被撞车尾部塑性变形平均深度因两车质量不等而引进的换算公式。m1为冲撞车质量,m2为被撞车质量。当m1=m2时,x2′=x2不用换算,因为式(8-40)是按照质量相等的两轿车进行追尾碰撞试验结果总结出来的,把它推广到质量不等的两轿车追尾碰撞中,应该按式(8-41)进行换算。
车辆尾撞冲突的求解方式有两种:
1)完全塑性碰撞时,碰撞后两车结合成一体向前滑移,直至停车。可按下列方程组求解:
2)非完全塑性碰撞时,碰撞后两车经过能量交换后,分别向前拖滑或滚动一段距离后停车。一般,冲撞车从开始碰撞到停车,始终是处于制动状态,有制动印迹;而被冲撞车有因被快速推动而来不及滚动,拖滑形成印迹的,还有因紧急制动被追尾形成印迹的;也有被撞后,滚动一段距离停车,没有形成印迹的。在计算两车碰撞后的速度时,有印迹按附着力做功计算,无印迹按滚动阻力做功计算。可按下列方程组求解:
式中 m1、m2——车辆1、车辆2的质量(kg);
L1、L2——车辆1和车辆2冲突后滑移的距离(m);
φ1、φ2——车辆1、车辆2滑移时的纵向附着系数;
i1、i2——车辆1、车辆2行驶路段纵坡坡度,下坡取负值,上坡取正值;
k1、k2——附着系数修正值,全轮制动时k=1,只有单轴制动k取轴数分之一;
f2——车辆2的滚动阻力系数;
x2′、x2——车辆2等价变形量和实际测量变形量(m)。
以上分析和计算中涉及的经验公式是基于小轿车碰撞试验取得的。因此,只适用于轿车之间的尾撞冲突,不适用于货车之间。大车低速冲撞轿车时,经修正可勉强使用;小车钻到大车底部不能使用。
4.二维碰撞事故求解
两车碰撞事故中,除了少量属于对心碰撞,碰撞后滑行过程中车体没有转动,或者转动不大,可以不予考虑之外,绝大部分都是非对心碰撞,碰撞后车体既平动又转动,平动和转动都消耗动能,两者同样重要。
(1)两车二维对心碰撞 当两车之间的碰撞冲力通过各自的质心时,称为对心碰撞。如何判断是不是对心碰撞,主要根据碰撞后车体是否转动,如果车体只平动不转动就是对心碰撞。有时虽有一些转动,但转动不大,不予考虑,也可以按对心碰撞处理。
如图8-9所示,1车和2车碰撞前行驶速度分别为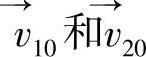 ,速度的方向角分别为α10和α20;碰撞后滑行速度分别为
,速度的方向角分别为α10和α20;碰撞后滑行速度分别为 和
和 ,速度的方向角分别为α1和α2。那么根据动量守恒方程:
,速度的方向角分别为α1和α2。那么根据动量守恒方程:
把它分别投影在x、y轴上得
m1v10cosα10+m2v20cosα20=m1v1cosα1+m2v2cosα2 (8-42)
m1v10sinα10+m2v20sinα20=m1v1sinα1+m2v2sinα2 (8-43)
这两个投影方程中,除两车质量、碰撞角度外,还有4个未知数。若要求解还需确定两车碰撞后的滑行距离,利用动能定理算出碰撞后两车的速度,然后才能计算出碰撞前的速度:

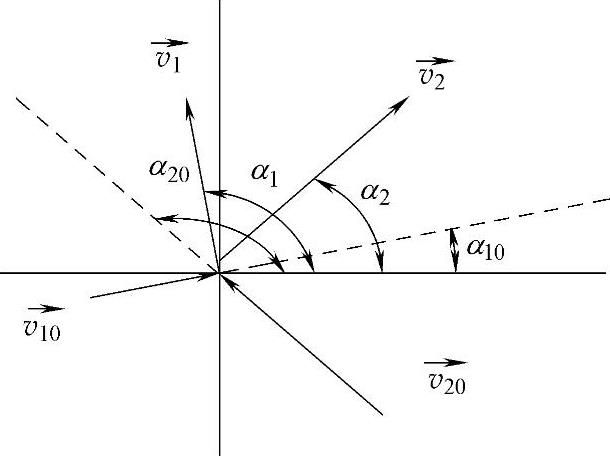
图8-9 二维对心碰撞
两车二维对心碰撞求解方式比较简单,关键是如何确定各车速度的方向,即两车碰撞前的方向角α10、α20,以及碰撞后滑行速度的方向角α1、α2。碰撞后角度可根据事故现场路面印迹、车辆撞击部位、碰撞点位置结合车辆尺寸和停车位置再现车辆撞击后的运动轨迹,并利用CAD绘制道路交通事故再现图,量出碰撞后滑行速度的方向角α1、α2。两车碰撞前速度的方向角α10、α20较难确定。一般根据道路交通事故现场的路面印迹、道路线形、交通标线位置、碰撞点、车辆的破损部位及破损尺寸结合驾驶人驾车的心理特征,根据道路交通事故速度鉴定中不确定参数的选取原则进行确定。碰撞前速度方向的获取有不确定性,导致鉴定结果具有不确定性,这就要求鉴定人依据不确定参数的确定原则结合事故特点运用自身实际经验,尽可能使鉴定结果确定在最小范围内,使鉴定意见具有法律意义。
(2)两车二维非对心(偏心)碰撞理论计算 非对心碰撞的主要特点是碰撞后车辆滑行时,不仅发生平动,而且发生转动。转动的大小决定于碰撞冲力与其偏离质心的距离的乘积。偏心距越大,转动的程度越大。求解方式一般还是利用二维对心碰撞的求解方法,要对转动动能予以补偿。一般通过修正平动距离来保证计算结果的准确性。一般取4个轮胎在路面留下的平均印迹长度来代替上述L值,或直接利用经验公式计算L值,同时要采用横向附着系数计算最终值。
还有学者研究采用三套直角坐标,建立车体平面运动动力方程的方法,但所需要的不确定参数太多,有的甚至根本就无法获取,计算过程复杂。
5.汽车与两轮车的碰撞事故
汽车与两轮车碰撞时只考虑平动不考虑转动,因为汽车质量大,碰撞过程中基本上不发生转动,即使有一点转动,也不予考虑。两轮车及行人虽有转动,甚至转动很大,但因为质量小,转动惯量小,转动部分的能量可以忽略不计。这样汽车和两轮车都不考虑转动,都按对心碰撞处理。
(1)汽车与摩托车的碰撞 汽车与摩托车的碰撞多数发生在交叉路口,碰撞的形式主要分两种情况:一种是摩托车的正面撞击汽车的侧面,另一种是汽车的正面撞击摩托车。
1)摩托车正面撞击汽车的侧面。根据摩托车正面撞击汽车后,汽车行驶的方向有没有明显的变化又可分两种情况。
情况一,如图8-10所示,摩托车正面撞击汽车的侧面后,使汽车的行驶方向发生明显变化。这种情况往往发生在质量较大的摩托车速度较高,而汽车的质量又比较小的时候。
如图8-10所示,m1、v10、v1为汽车的质量,碰撞前后的速度;m2、v20、v2为摩托车的质量,碰撞前后的速度;mp、vp为摩托车驾驶人的质量,碰撞后抛出的速度。虚线长方形表示汽车被撞击的位置,实线长方形为汽车被撞后制动停止的位置,L1 为汽车碰撞后制动拖印的长度,L2为摩托车倒地滑移距离,Lp为摩托车驾驶人抛出滑移距离。θ为汽车被撞后制动侧滑角度,θp为摩托车驾驶人抛出角度,θ2为摩托车侧滑角度。
于是就可应用动量守恒定理

在x轴上投影得到
m1v10=m1v1cosθ+m2v2cosθ2+mpvpcosθp (8-46)
在y轴上投影得到
(m2+mp)v20=m1v1sinθ+m2v2sinθ2+mpvpsinθp (8-47)
求v1、v2、vp的速度
图8-10 摩托车正面撞击汽车侧面
式中 h——摩托车驾驶人乘坐位置与落地位置质心高差(m);
μ——摩托车驾驶人落到地面后与路面间的滑动摩擦系数;
φ1、φ2——汽车的纵向附着系数、摩托车倒地滑移时的摩擦系数。
情况二,摩托车正面撞击汽车的侧面后,汽车的行驶方向没有明显的变化。这种情况往往发生在汽车质量远远大于摩托车和人的质量,即m1>>(m2+mp)时。
当汽车的质量比较大,或者摩托车的速度不太大时,虽然汽车的侧面受到摩托车正面的撞击,但汽车的行驶方向不会有明显的变化,也就是偏斜角θ很小,很难准确测定。有时连碰撞位置也很难确定,因为制动印迹没有明显的转折点。在这种情况下,汽车的行驶速度只要根据制动拖印长度计算就可以了,也不用区分碰撞前和碰撞后。但是摩托车碰撞前的速度无法应用动量守恒方程进行求解。为了解决这类问题,国外的研究者做了大量的模拟试验,得到经验公式为
v=1.5D+12 (8-51)
式中 v——摩托车的碰撞速度(km/h);
D——摩托车驾驶人因碰撞造成的前后轴间距离的减少量(cm)。
试验时,摩托车的质量从90kg到218kg不等,被撞标准汽车的质量为1950kg。取得经验式(8-52)。可见不论摩托车的质量如何变化,上述关系都成立,可以把上述关系推广到任意品牌、型号的摩托车。但对于其他质量的汽车,就需要进行质量换算了。
假设事故汽车的质量为m1,摩托车连人的质量为m2,摩托车的轴距减少量为D,那么先按式(8-51)计算碰撞标准车时的速度v,再按下式换算成碰撞事故车时,摩托车碰撞前的速度为

2)汽车正面碰撞摩托车。在汽车与摩托车碰撞的交通事故中,绝大部分属于这种类型。汽车是冲撞车,所以碰撞发生在汽车的头部,可以在头部的中央,也可以在左前角或右前角。对被撞的摩托车而言,可以撞在它的侧面中央,也可以撞在它的头部或尾部。不仅如此,摩托车行驶的方向与汽车行驶的方向不一定正好垂直(正交),也可以斜交任何角度,甚至正面碰撞或追尾碰撞都可以,这是因为不考虑汽车和摩托车的转动,属于对心碰撞,不管碰撞冲力作用在哪里,都如同作用在质心一样。
设m1、v10、v1为汽车的质量,碰撞前后的速度;m2、v20、v2为摩托车的质量,碰撞前后的速度;mp、vp为摩托车驾驶人的质量及碰撞后的速度。
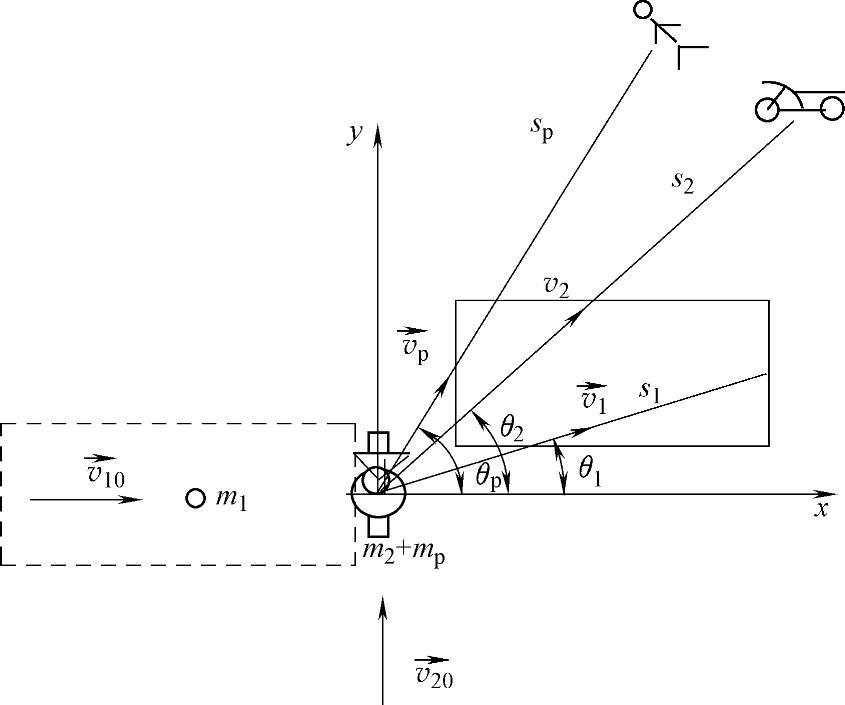
图8-11 汽车正面撞击摩托车
如图8-11所示,虚线长方形表示碰撞时汽车的位置,实线长方形为碰撞后制动停止的汽车位置。
再设L1、L2、Lp分别为碰撞后汽车、摩托车及其驾驶人滑行的距离,θ1、θ2、θp分别为碰撞后汽车、摩托车及其驾驶人滑行方向的偏角。
于是就可应用动量守恒定理

在x轴上投影得到
m1v10=m1v1cosθ+m2v2cosθ2+mpvpcosθp (8-53)
在y轴上投影得到
(m2+mp)v20=m1v1sinθ+m2v2sinθ2+mpvpsinθp (8-54)
求v1、v2、vp的速度

式中 h——摩托车驾驶人乘坐位置与落地位置质心高差(m);
μ——摩托车驾驶人落到地面后与路面间的滑动摩擦系数;
φ1、φ2——汽车的纵向附着系数、摩托车倒地滑移时的摩擦系数。
(2)汽车与自行车的碰撞 汽车与自行车的碰撞与前面讲的汽车与摩托车的碰撞在理论上是完全一样的,前面讲的各计算公式对汽车与自行车的碰撞也都是成立的。但是,结合自行车的特点又可有一些简化。首先,自行车没有车速限制,不需要计算自行车速度v20,只需要计算汽车速度v10。其次,自行车重量不过一二十千克,与汽车相比微乎其微,即使连同骑车人与汽车碰撞时,对汽车动量的影响也可忽略不计,也就是认为碰撞前后车速没有变化,即v10=v1。因此,动量守恒方程在这里已经自动满足,不能求解具体问题,只能通过能量的途径。对于汽车行驶速度的计算,有三种方法可供选择。
1)用制动拖印总长度直接计算汽车的行驶速度。不管在碰撞前开始制动,还是碰撞后才开始制动,只要已知制动拖印总的长度,直接计算汽车的行驶速度即可,而不必先计算碰撞前后的车速v10和v1,再反推行驶速度。
2)用骑车人被抛出的速度推算汽车的行驶速度。如果事故现场图中能已知骑车人被抛出的距离Lp和方向θp,便可按式(8-57)计算碰撞后人体的抛出速度vp,并计算汽车碰撞前后的速度:
v10=v1=vpcosθp
如果汽车碰撞前还有制动拖印,当然还要在v10的基础上反推行驶速度。
3)用自行车在路面上留下的划印推算汽车的行驶速度。与假定人体与汽车的碰撞属于完全塑性碰撞相类似,也可假定自行车与汽车的碰撞为完全塑性碰撞,也有相似的公式:
v10=v1=v2cosθ2
并且进一步作相似的计算。当然,第3种方法可靠性要差一些,仅供参考。
6.汽车与行人的碰撞事故
汽车与行人的交通事故中,汽车行驶速度的计算有以下三种途径。
(1)根据汽车制动拖印长度直接计算其行驶速度 若在碰撞行人的前后,汽车采取了紧急制动措施,路面上留下了明显的制动拖印,则汽车行驶速度v为

式中 L——制动印迹长度(m);
φ——轮胎与路面的附着系数;
i——道路纵坡坡度,下坡取负值,上坡取正值。
这里的L包括碰撞行人前后总的制动拖印长度。
(2)根据行人被抛出的距离计算汽车撞人时的速度 首先假定汽车和行人间的碰撞是完全塑性碰撞(即没有弹性恢复),碰撞后人和车具有相同的速度。行人被撞后,往往先倒向发动机罩,之后从发动机罩或前风窗玻璃上大致沿水平方向抛出,呈抛物线轨迹落在地面上,落地后在路面上滑行,最后停止。与式(8-7)完全一样,推导得图8-12。

式中 v——汽车的碰撞速度(m/s);
h——行人撞飞高度(飞出时人的重心高度)(m);
L——抛距,包括飞行距离和滑行距离(m);
μ——人体在路面上滑行的摩擦系数。
(3)按车头变形估算据国外资料介绍,轿车前围板或发动机盖上因撞人留下的凹陷深度x(cm)与车速呈线性关系,如图8-13所示,其范围用公式表示为
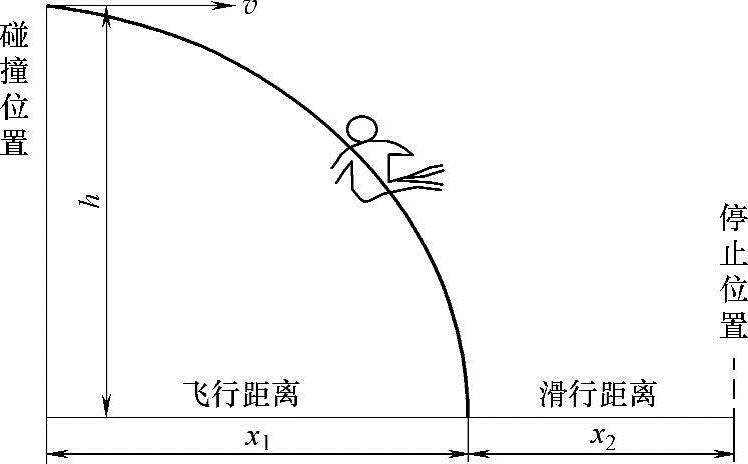
图8-12 人体被车辆撞飞后的滑行轨迹
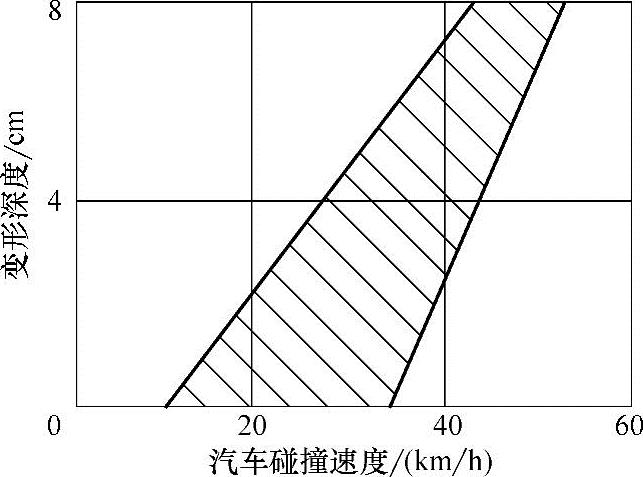
图8-13 行人撞车时前围板凹陷深度与车速的关系
最小值:vmin=3.92x+13.6 (8-60)
最大值:vmax=2.55x+33.0 (8-61)
7.道路交通事故不确定参数选取
道路交通事故速度再现中的参数具有不确定性。在实际交通事故再现中,许多现场参数不可能是唯一的准确值。例如,现场制动拖痕长度、二维碰撞中的角度、地面附着系数、滚动阻力系数、轮轴制动附着系数修正系数、旋转长度修正系数、车体变形量等都是根据不同情况有不同的取值。导致这种不确定性的因素很多,主要有:重复测量、不同的路面状况、不同的轮胎气压、不同的车速、不同的车辆技术状况等。这些都直接影响再现结果的准确性。不同的不确定参数选取要遵循一定的原则和方法。
(1)现场制动拖痕长度 现场制动拖痕长度一般以实际测量为准,若各轮的制动拖痕近似相等,可根据“边界值法、偏差法、数理统计法”等常规方法确定。
若各轮的制动拖痕不尽相等,可根据不同的车辆制动系统配置及技术状况对实测值进行修正。例如,当制动系统有ABS、EBD等主动安全配置且技术状况良好时,可使用各轮拖痕中最长的作为计算值,因为配有上述设施的制动系统制动时在车轮没有抱死形成拖痕时会产生更大的地面制动力,消耗更多的能量。
若非对心碰撞,则车辆运行过程中既有滑移,又有旋转,考虑到旋转消耗的能量,可对各轮的实际拖滑轨迹曲线测量以求平均值。若不具备现场实际曲线测量条件,可对现场图中直线距离修正,该修正系数与运行距离及车辆旋转角度均有关,具体修正情况可根据车辆各轮旋转横滑时的运行轨迹与车辆质心运行轨迹之间的比例关系确定。例如,一般旋转180°系数为1.3。同时对附着系数加以修正(见下文)。
(2)地面附着系数及滚动阻力系数 地面附着系数在众多不确定参数中对速度鉴定的结果影响较大,因此取值科学与否是研究的主要内容。
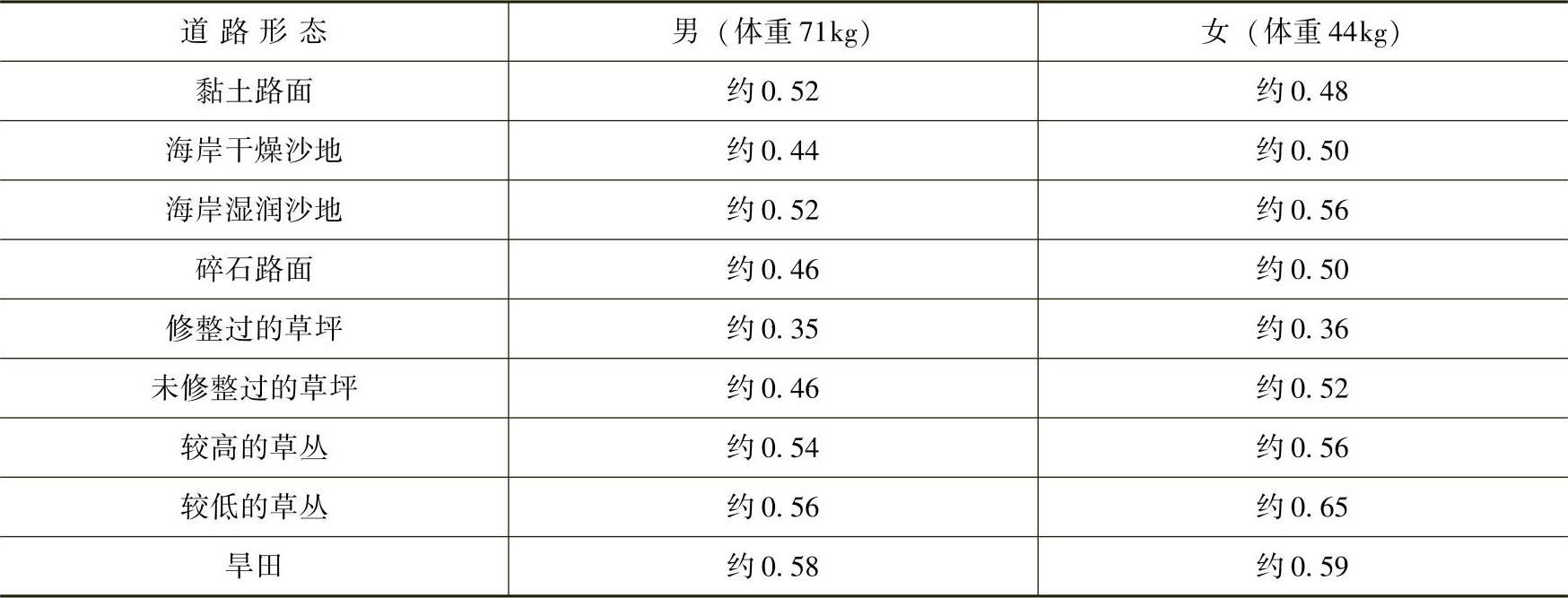
在事故鉴定中地面附着系数的获取。若有条件可进行实测,确定多个实测之后可根据“边界值法、偏差法、数理统计法”等常规方法进行数据处理获取所需值;若无法实测,可按公安部关于《典型交通事故形态车辆行驶速度技术鉴定》中汽车纵滑附着系数参考值表(见表8-1)按下限选取;若翻车时车身滑动、摩托车或人体与地面摩擦,也可参照表8-2~表8-4规定;若车辆有横向滑移,可对纵向附着系数按下式修正:φs=0.97ϕ+0.08。
表8-1 汽车纵滑附着系数参考值表
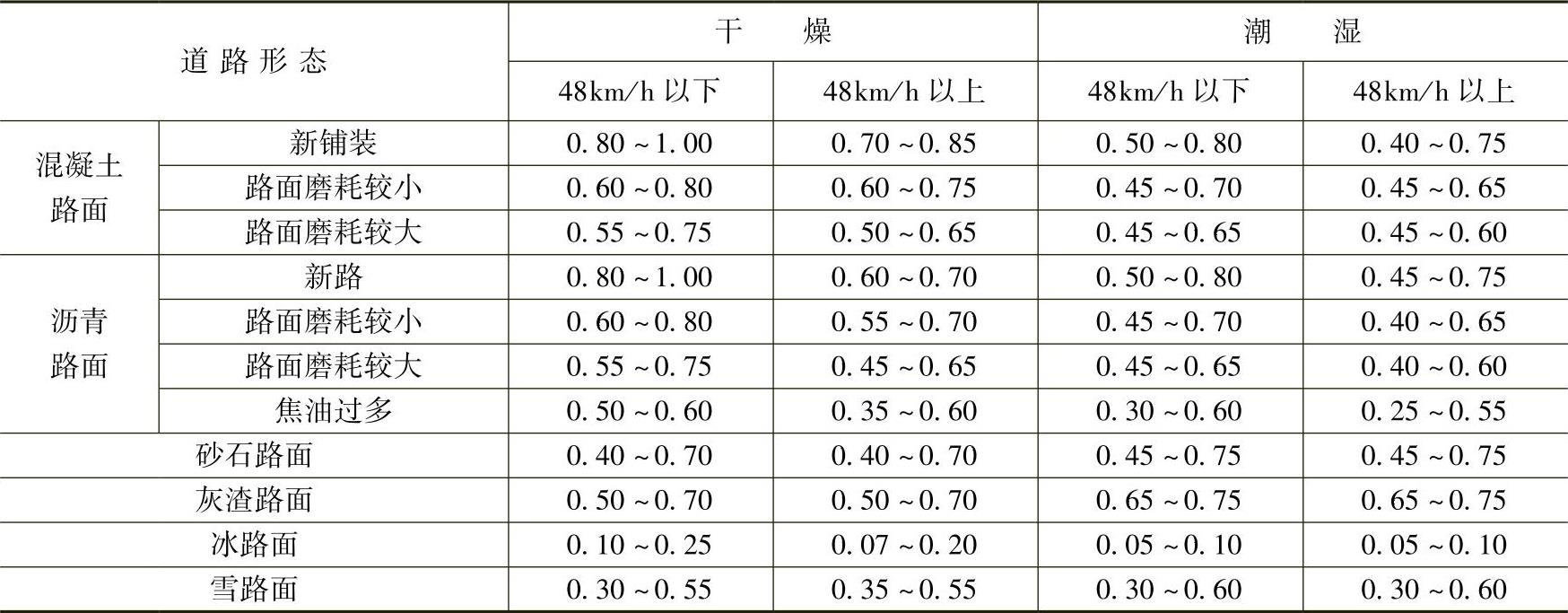
表8-2 翻车时车身滑动摩擦系数参考值表
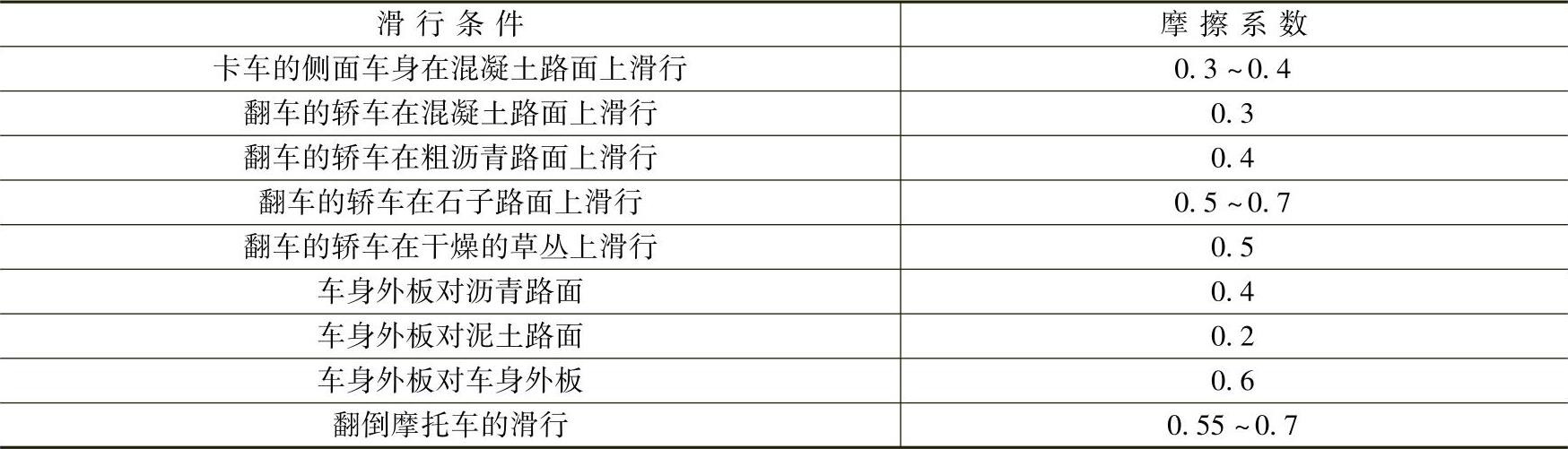
表8-3 摩托车的纵滑附着系数参考值表
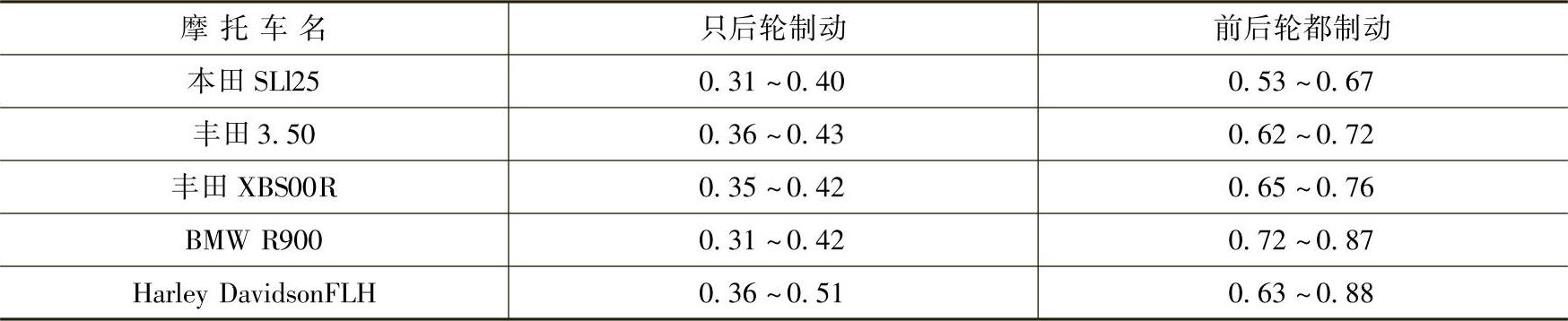
表8-4 着装人体与地面摩擦系数参考值表

(续)
滚动阻力系数与附着系数相比相差几十倍,一般情况下对鉴定结果的影响不大,可忽略;但在一些特殊情况下,例如泥泞、积雪(未压实)路面或重型载货汽车爆胎时,滚动阻力所消耗的能量是不可忽略的,在计算过程中要加以考虑,系数可参照表8-5选取或取更大一些。
表8-5 汽车滚动阻力系数参考值表
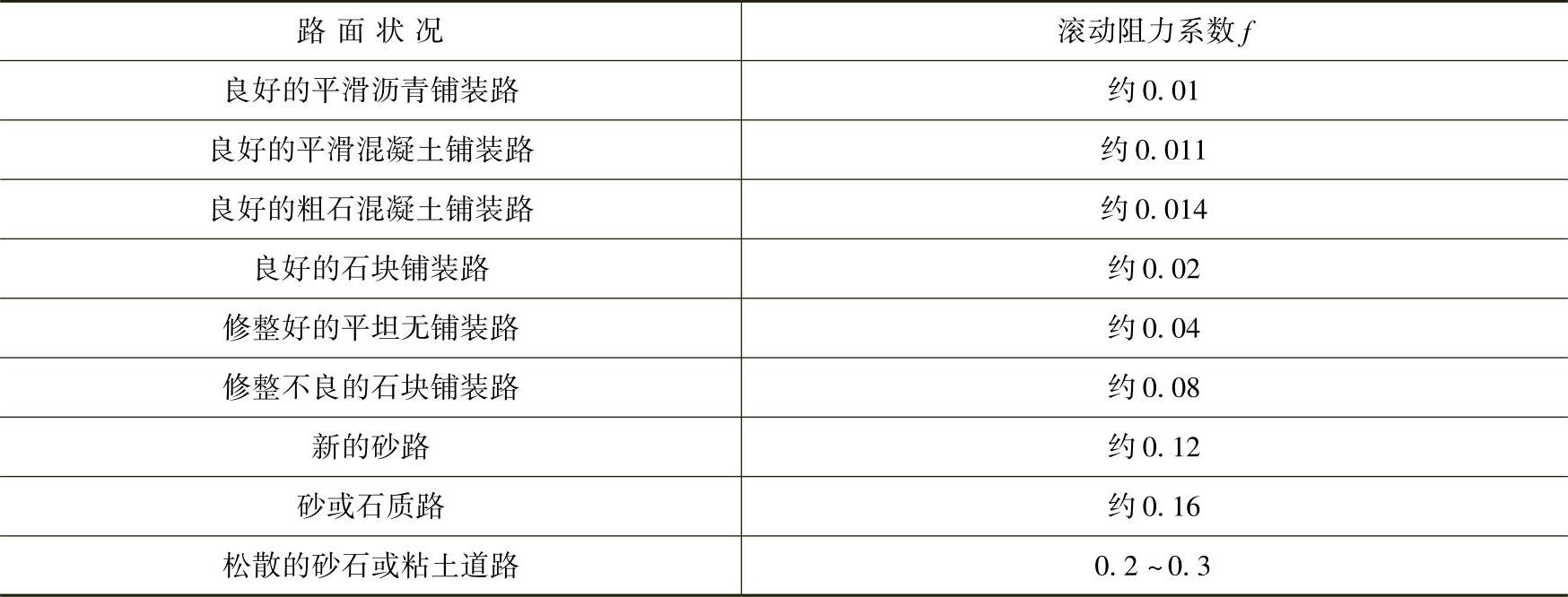
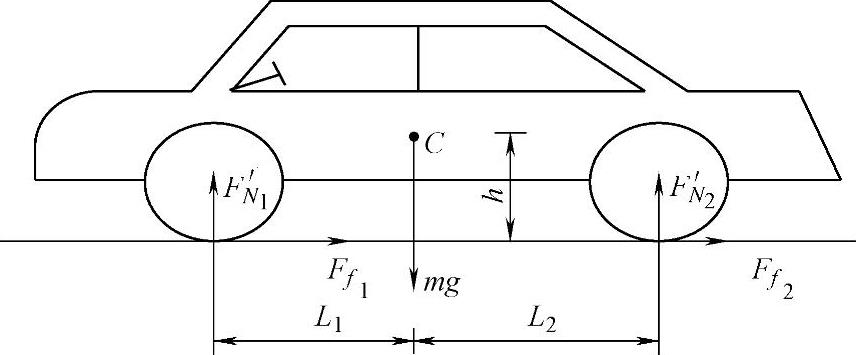
图8-14 汽车只有前轮制动时的受力图
(3)轮轴制动附着系数修正值 汽车碰撞事故中,当汽车发生制动时,由于机械故障或者其他某种原因,造成汽车只有前轴或者后轴实施了有效制动。此时,汽车制动产生的附着力与汽车全轮制动时产生的附着力的比值称为轮轴制动附着系数修正值。
假设汽车制动时,只有前轴实施了有效制动,其受力如图8-14所示。
作用于汽车的力有重力mg,前轮和后轮所受的地面支持力 和
和 ,还有前轮的摩擦阻力
,还有前轮的摩擦阻力 和后轮的滚动阻力
和后轮的滚动阻力 。则以过质心C垂直于纸面的轴为转轴,并取顺时针方向为正方向,根据力矩平衡,有
。则以过质心C垂直于纸面的轴为转轴,并取顺时针方向为正方向,根据力矩平衡,有
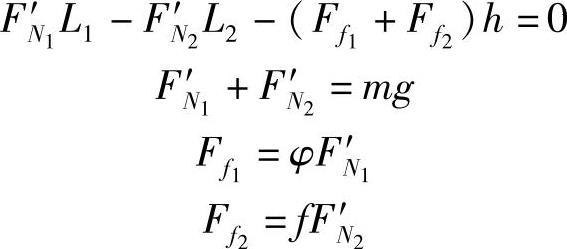
得到
与下式联立L1+L2=b
得

式中 φ——汽车附着系数;
f——汽车滚动阻力系数;
b——汽车前后轴的轴距;
h——汽车质心高度;
L1——汽车前轴与质心之间的距离;
L2——汽车后轴与质心之间的距离。
因此,根据附着系数修正值定义,只有前轴制动时有

设汽车初速度为v0,经过前轴制动一段距离S后停了下来,则根据能量守恒定律有
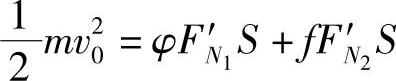
则只有单前轴制动的初速度为

单后轴制动式(8-64)同样有效。下面举例验证只有前轴或只有后轴制动时,速度的变化情况。行驶在良好水泥路面上的某微型汽车b=2.9m,L2=1.5m,h=0.7m,碰撞后的制动距离S=20.0m。设φ=0.8,f=0.020。
1)若只有前轴制动时,则前轴的附着系数修正值为

单前轴制动初速度为

2)同理,可以推导证明,若只有后轴制动,则附着系数修正值

单后轴制动初速度为
而该车全轮制动时的初速度为

相比之下,说明只单轴制动比四轮制动效率要低一些。后轴制动效率比前轴制动更低。从实际出发,这个结论也是合理的。这是因为当汽车制动时,重心前移,致使后轮对地面的正压力减小,后轮摩擦力随之减小,其制动效率比前轴制动效率还要低。
3)当只有单轮制动时,由于汽车左右两侧质量分布较为均匀。因此,汽车单轮制动时,其制动修正值取前轴或者后轴制动修正值的一半。单一前轮加单一后轮制动时,修正值k=0.5;多轴的大型货车,可按轴荷、轴数,以及按比例分配修正值。
从上述研究结果可见,准确确定全轴制动、单轴制动,对鉴定结果影响非常大。如何确定是单轴还是全轴呢?可根据地面拖痕印迹结合制动器鉴定意见综合分析,若前后轴都有印迹,可确定为全轴制动;若只有单轴制动印迹,可检验、鉴定制动器或根据汽车理论相关知识确定。例如,一小轿车以80km/h的速度追尾停在路边的一辆大货车并嵌入其尾部2m后起火燃烧。碰撞前小轿车实施了制动,但现场只留有后轴8.9m长的制动印迹且前轴全部损毁无法对制动器检验确定有效性,可根据汽车理论知识确定:当只有后轴制动且速度大于48.5km/h时,制动车辆将发生180°跑偏,而本案小轿车在碰撞前制动且无任何跑偏现象,说明是全轴制动。至于没有印迹,可能是前轴印迹在起火燃烧后灭失。
(4)二维碰撞中的角度确定 在二维碰撞事故中碰撞前后的角度确定较为复杂,直接影响鉴定结果准确性。
1)碰撞前的角度确定。首先确定碰撞点,然后利用道路交通事故现场的路面印迹、道路线形、交通标线位置、车辆的破损部位及破损尺寸结合驾驶人驾车的心理特征,根据道路交通事故速度鉴定中不确定参数的选取原则进行确定。例如下面某案例,根据事故现场图、事故现场勘查笔录、现场痕迹、车辆撞击痕迹分析,在碰撞时,A车已完成左转弯向东路口行驶,与x轴夹角为0°。当发现左转弯行驶的A车时,B车驾驶人本能地向右转动转向盘进行躲避。因此,碰撞发生时,B车的速度方向与南北方向有一定的夹角,与x轴成θ2角,如图8-15所示。事故前B车沿龙金大道内侧车道正常行驶,当B车驾驶人的视距能够发现左转弯的A车时,必须到达图8-15所示位置。B车在龙金大道内侧车道、距A车在碰撞点位置20.0m左右的位置,可近似取20m。利用CAD量出碰撞前角度θ2。
2)碰撞后的角度确定。车辆碰撞后运动若无外力作用,车辆运动符合质心运动定理。根据CAD实车比例事故现场图,连接各车在碰撞点位置到各自最终停放位置的质心,确定各车碰撞后的角度,如图8-15所示。
车辆碰撞后若受到外力干扰,例如碰撞后驾驶人转动转向盘或前轮胎爆裂导致运行方向不符合质心运动定理,上述方法就行不通了。可考虑用碰撞后瞬间各车产生的印迹方向确定碰撞后的角度。
(5)车体变形量 车辆塑性变形量的近似计算方法如图8-16所示。

式中 x——车辆塑性变形量;
x1——车辆塑性变形量最小值;
x2——车辆塑性变形量最大值;
y1——车辆塑性变形量最小值处距最大值处长度;
y0——车辆被撞变形一侧的宽度。
但在实际道路交通事故速度鉴定中,运用上述方法测量计算的变形量误差较大。正面碰撞车辆,一般采用在肇事车辆破损面上均匀选取多点作为测量点,测量到前保险杠立面的距离取平均值。
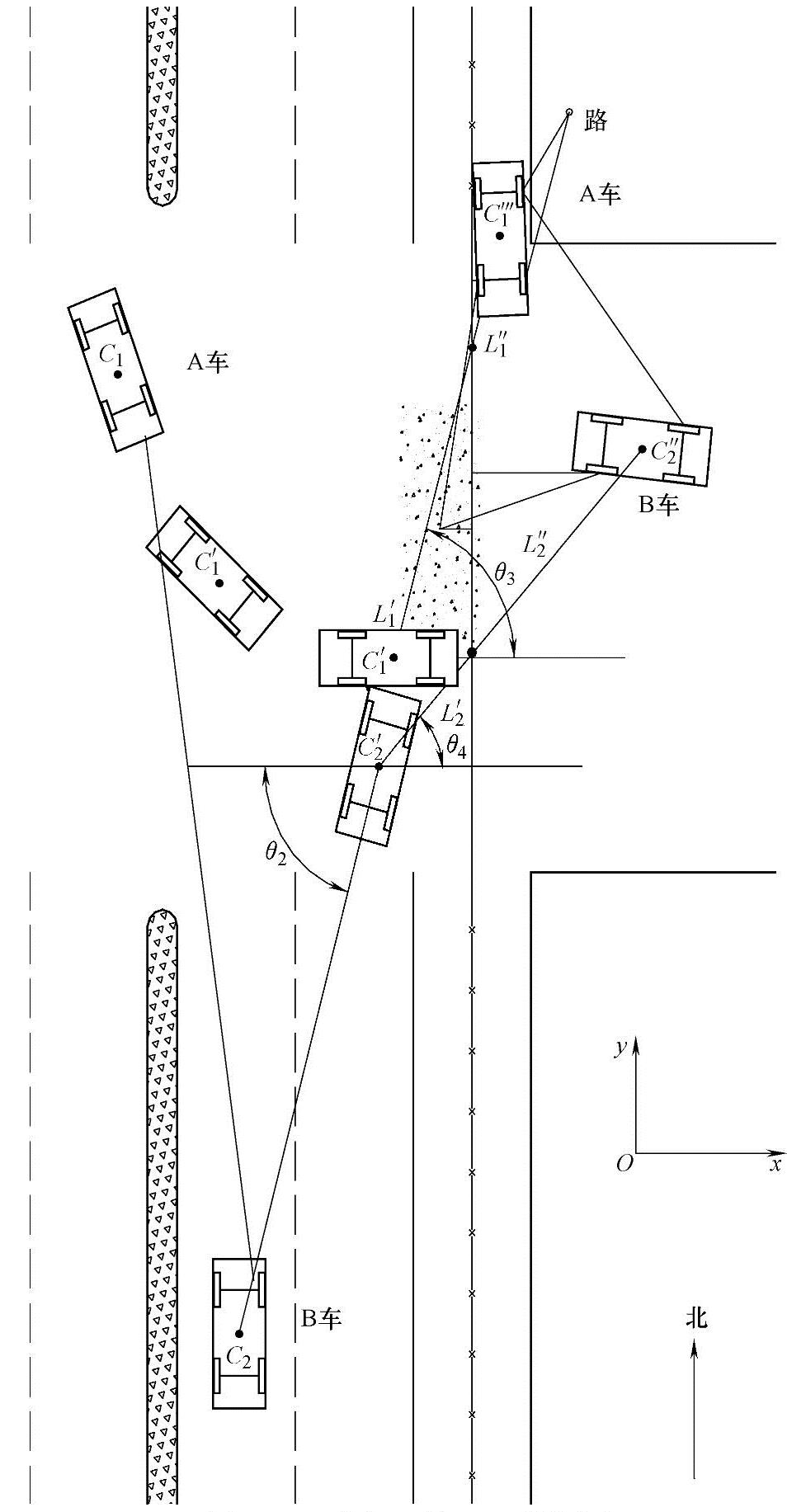
图8-15 车辆碰撞过程分析图
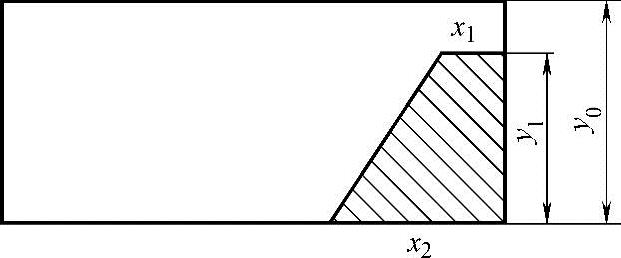
图8-16 车辆各处变形在地面上的垂直投影
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。