



在稳控系统控制中,无论是基于车轮滑移率的控制,还是基于车轮加、减速度的控制,都需要实时准确地辨识路面。因为对于不同的路面,其防抱死特征是不一样的,其控制参数也不同,为了保证稳控系统在不同的路面上正常工作并获得最佳制动效果,必须进行路面识别。路面识别问题是稳控系统研究的关键技术之一。由车辆与路面构成的系统是一个复杂的非线性动态系统,车辆制动过程复杂多样,而传统的稳控系统仅能采集轮速信号,因此路面识别难度十分大。一些研究者提出了通过光学、声学、雷达等传感器识别路面的方法,但是由于成本原因,不适用于稳控系统。国内外研究者提出了采用估计出的道路附着系统对车轮滑移率相对变化的梯度来对路面进行分类、基于轮胎模型的路面估计、基于竞争神经网络路面识别、路面模糊分类识别等的稳控系统路面识别方法,但是由于分类粗糙、计算量较大或依赖轮胎模型的准确性等原因,实际应用的不多。
仿真条件为:车辆以80km/h初速在三种不同纵向附着系数的单一路面上进行常规制动,三种路面的纵向峰值附着系数(μc)分别为0.8、0.5、0.3。三种路面上常规制动过程中的耗散功率(均以左前轮为例)如图3-37所示,图中显示了制动开始到抱死的一段时间的数据。由仿真结果可知,路面附着系数越高,车轮所能达到的制动器耗散功率的最大值越大。
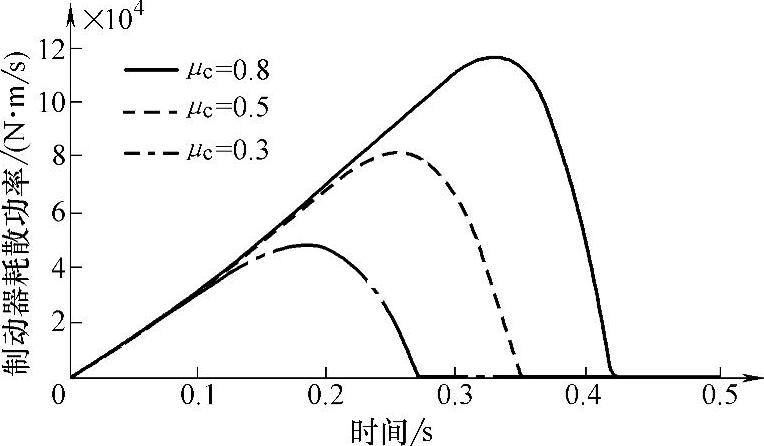
图3-37 不同纵向附着系数路面上的耗散功率
仿真条件:车辆分别以80km/h、60km/h和30km/h的初速在纵向峰值附着系数为0.8的路面上进行常规制动,制动过程的耗散功率仿真结果(以左前轮数据为例)如图3-38所示。仿真结果表明,制动初速越高,车轮所能达到的耗散功率的最大值越大。综上,在车辆制动过程中,耗散功率所能达到的最大值与路面附着系数和车速有关。因此在考虑车速对耗散功率的影响后,路面附着状况识别通过耗散功率实现。对几种典型的稳控系统制动过程进行分析,首先考虑在单一路面上进行稳控系统制动的工况,车辆以60km/h的初速度在附着系数0.8的路面上进行稳控系统制动,其轮速(以左前轮为例)、车速及耗散功率的仿真结果如图3-39所示。可见耗散功率基本上随着车速的降低而降低。
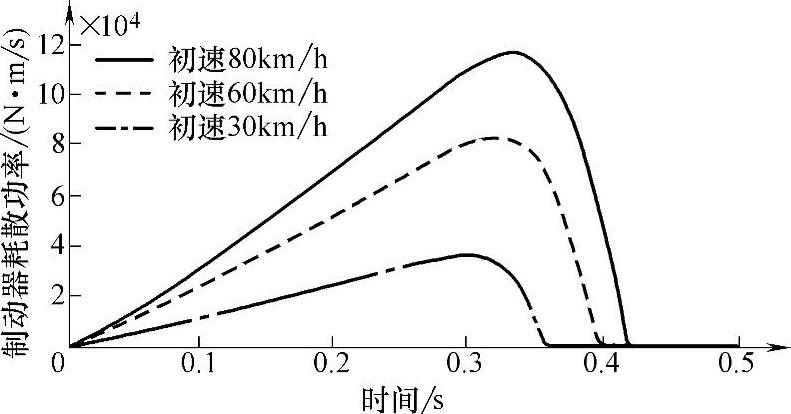
图3-38 不同初速度条件下的耗散功率
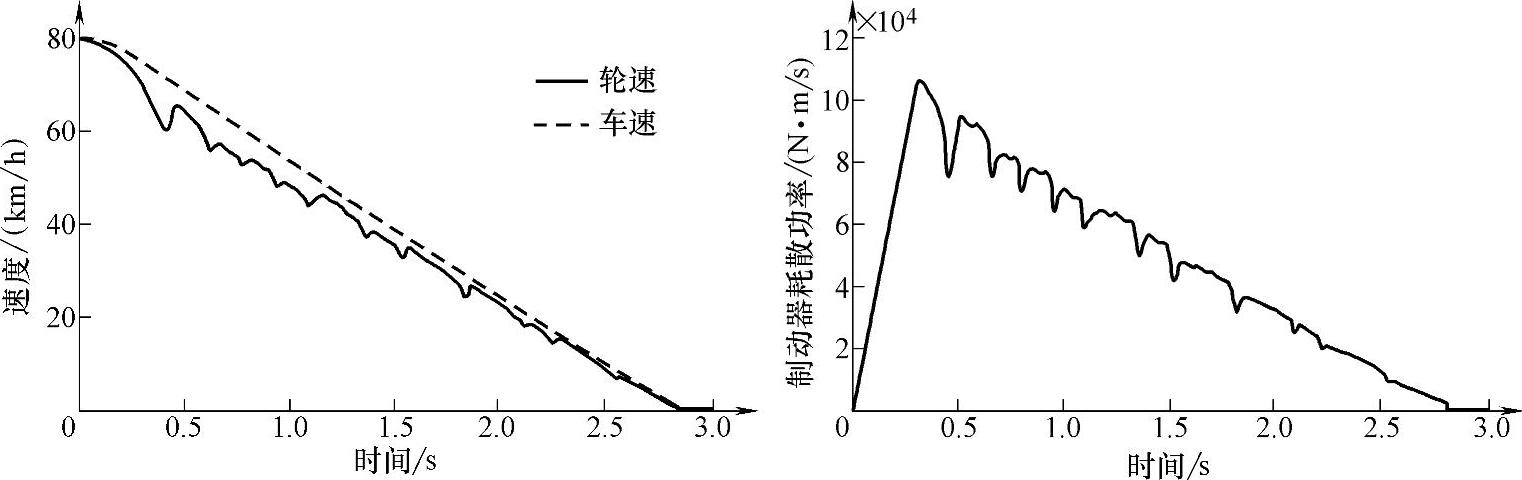
图3-39 高附着路面上稳控系统制动的耗散功率
对车辆在对接路面上的稳控系统制动工况进行仿真,对接路面由高附着路面过渡到低附着路面,制动初速80km/h,仿真结果(以左后轮数据为例)如图3-40所示。可见当车辆制动从高附着路面过渡到低附着路面时,耗散功率迅速降低。路面附着越高,耗散功率越大;当路面附着系数跳变时,耗散功率数值变化也很明显;耗散功率与车速有关,车速越高,制动耗散功率越大。路面识别需要准确并且及时,无论稳控系统采用何况控制方法,其本质都是将滑移率控制在峰值附着系数对应的滑移率附近,如图3-41所示。稳控系统首次开始控制的条件为实际滑移率大于峰值附着系数对应的滑移率,即进入非稳区。当稳控系统判断车轮进入非稳区时,稳控系统开始控制制动压力,将稳控系统首个控制循环时间段内的路面识别称为首次路面识别。首次路面识别的准确性与及时性直接影响后续控制过程的效果。
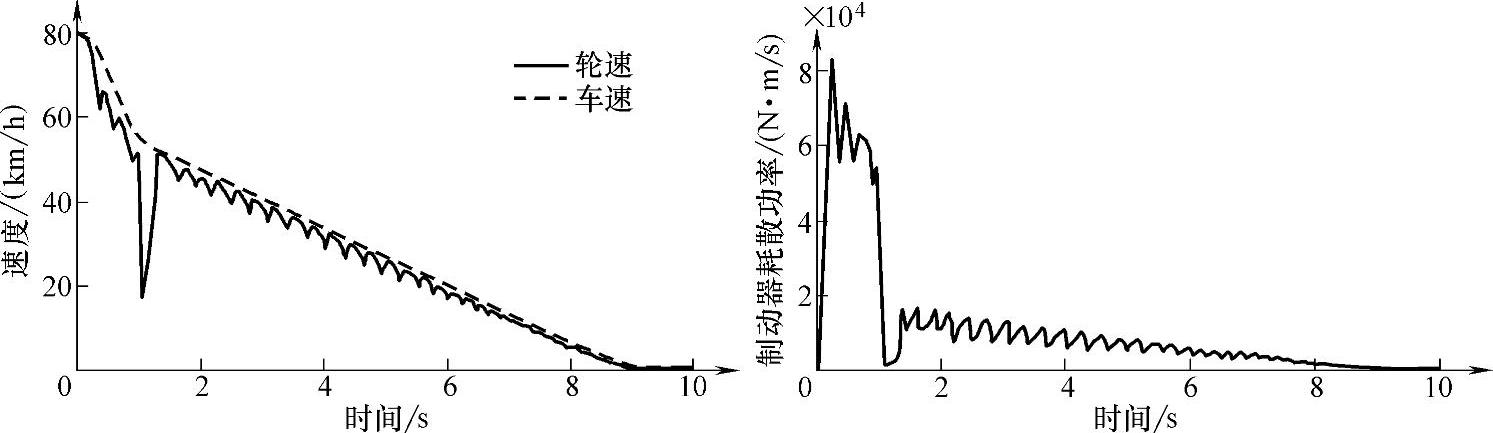
图3-40 对接路面稳控系统制动过程的耗散功率
对稳控系统在低附着路面上的制动工况进行仿真,其路面的纵向峰值附着系数为0.2109,对应的滑移率为0.095。仿真结果如图3-42所示,图中显示的是稳控系统首个控制循环的滑移率与耗散功率的情况。由仿真结果可知,对于稳控系统的首次路面识别阶段,耗散功率最大值的出现(图3-42中的B点)比对应峰值附着系数的滑移率出现(图3-42中的A点)略早,因此在稳控系统判断车轮进入非稳区之前就已经出现耗散功率的最大值,根据此最大值进行的路面识别能够在稳控系统第一次控制出现之前完成,因此路面识别迅速。用模糊推理的方法进行路面识别,建立的路面识别模糊推理模型如图3-43所示。路面识别模糊推理模型是两输入单输出系统,以耗散功率和车速为输入,识别的路面附着系数为输出。
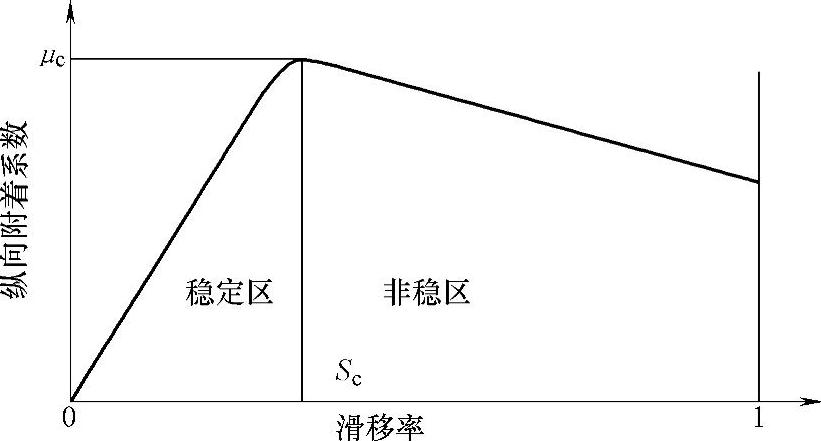
图3-41 稳定区与非稳定区
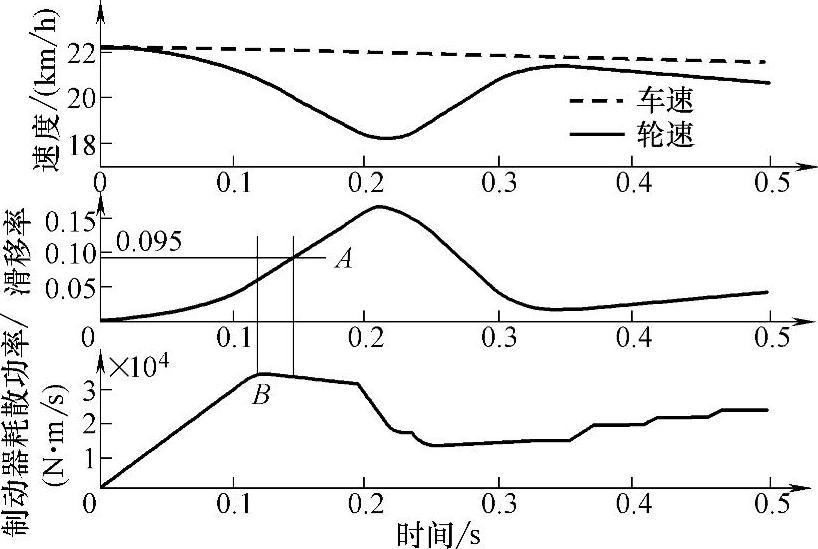
图3-42 滑移率与耗散功率的仿真结果

图3-43 路面识别的模糊推理模型
(1)输入输出论域及模糊集合的设定
设车速v的变化区间是[0120km/h](车速超过120km/h的以120km/h计),将车速变化区间通过线性处理转化为区间[012],称为输入论域Uv。Uv上有7个模糊集合,分别代表非常低速(VS)、低速(S)、中低速(MS)、中速(M)、中高速(MH)、高速(H)和非常高速(VH)7个状态。耗散功率的变化范围是[01.6×105N·m/s](超出边界部分按照边界处理),将耗散功率变化区间通过线性处理转化为区间[016],称为输入论域Up。Up上有16个模糊集合,分别代表耗散功率为零(Z)、极小(TS)、非常小(VS)、很小(QS)、较小(CS)、小(S)、偏小(LS)、中小(MS)、中(M)、中大(MB)、偏大(LB)、大(B)、较大(CB)、很大(QB)、非常大(VB)和极大(TB)16个状态。设论域Uμ[0.10.8]为系统输出路面附着情况的变化区间,其上有8个模糊集合,分别代表路面附着系数非常低(VL)、较低(CL)、低(L)、中低(ML)、中(M)、中高(MH)、高(H)和很高(VH)。
(2)模糊规则的制定
确定输入输出论域及隶属度函数后,制定模糊推理规则库。两个输入论域分别有7和16个模糊集合,则总的模糊推理规则数为7×16=112条。模糊规则根据实车数据和路面具体条件的经验总结制定,制定的主要原则为:(https://www.xing528.com)
1)如果耗散功率极大,无论车速高低,都可以判断路面附着系数都很高。
2)如果耗散功率极小,无论车速高低,都可以判断路面附着系数很低。
3)如果耗散功率比较大,这时需要考虑车速的高低,如果车速很高,则路面附着系数低,如果车速很低。则路面附着系数高。
4)如果耗散功率比较小,也需要考虑车速的高低,如果车速很高,则路面附着系数低,如果车速很低,则路面附着系数高。
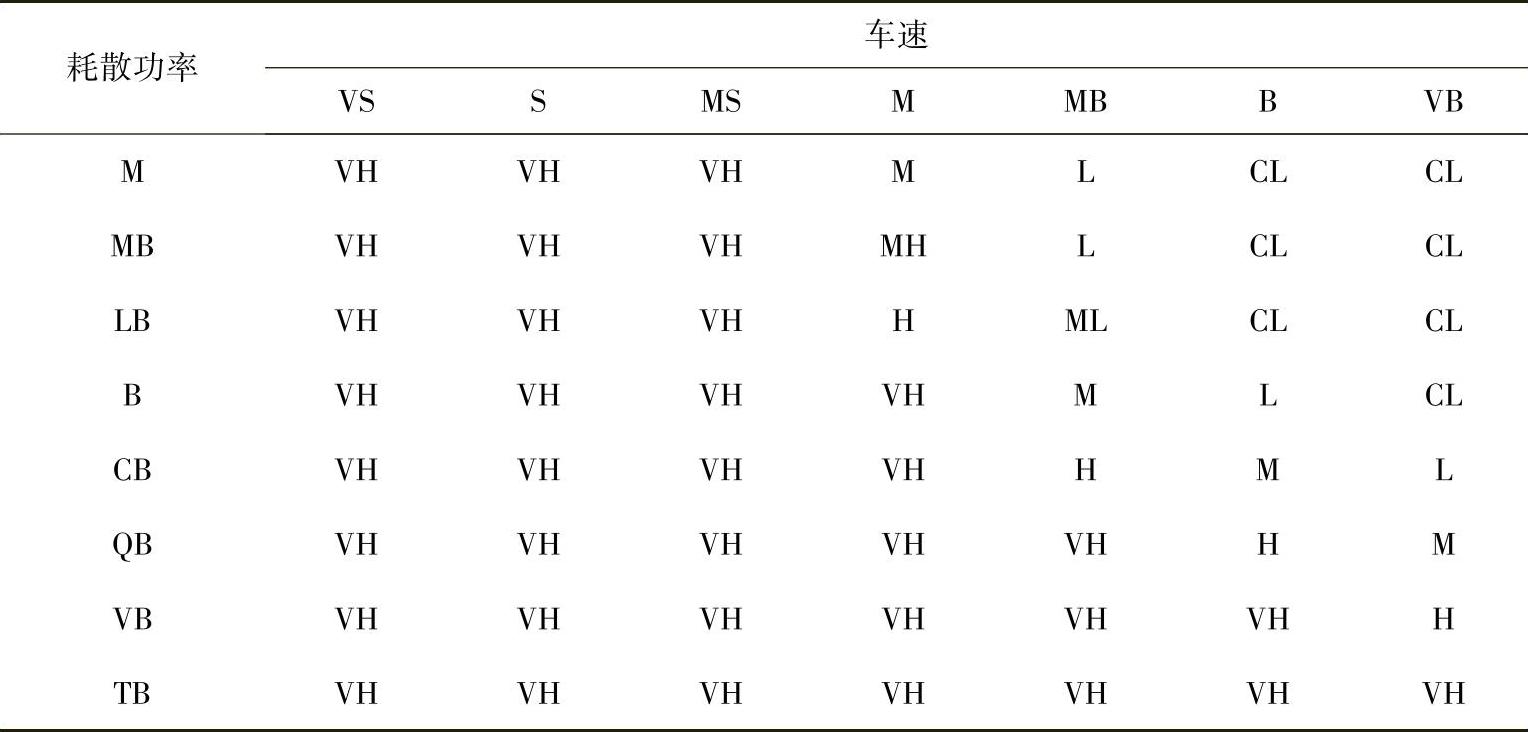
根据上述原则,结合实车数据,可以制定所有的模糊推理规则,见表3-1。
表3-1 路面识别模糊推理规则表

(续)
根据上述规则建立模糊推理模型,得到模糊推理示意图如图3-44所示。
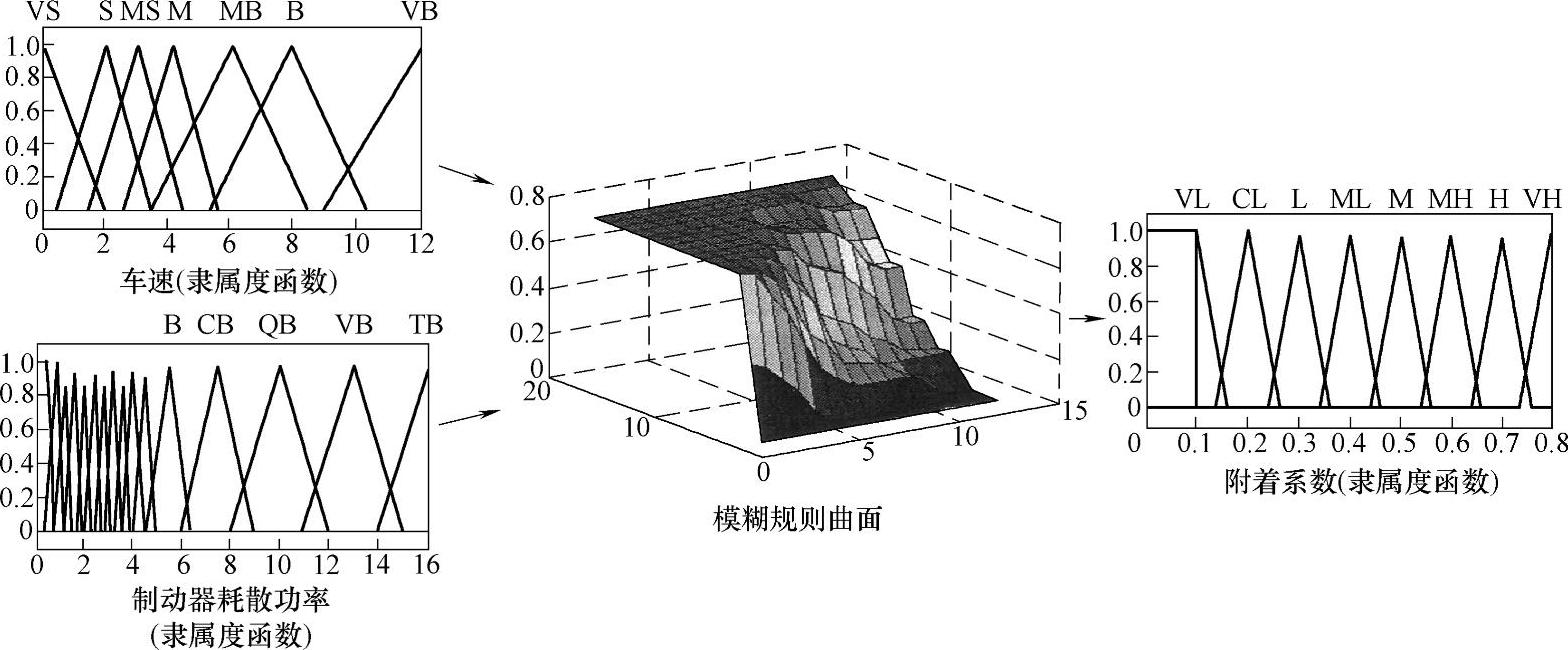
图3-44 路面识别模糊推理示意图
(3)路面识别算法
路面识别算法如图3-45所示。路面识别的输入为耗散功率和参考车速。其中耗散功率由制动轮缸压力和轮速计算得到,轮速由轮速传感器测得,轮缸压力通过轮缸压力估计算法得到;参考车速通过车轮的轮速按照一定的算法得到。路面识别分为首次路面识别和后续路面识别。首次路面识别通过稳控系统第一次动作前耗散功率所能达到的最大值及对应的车速通过模糊推理得到;后续路面识别通过滤波后的耗散功率与参考车速通过模糊推理得到,对耗散功率进行低通滤波,可以一定程度上消除耗散功率波动带来的影响。图3-46所示为车辆在高附着路面(路面附着系数0.8左右)上进行稳控系统制动的数据,识别结果与实际路面状况一致,识别及时准确。
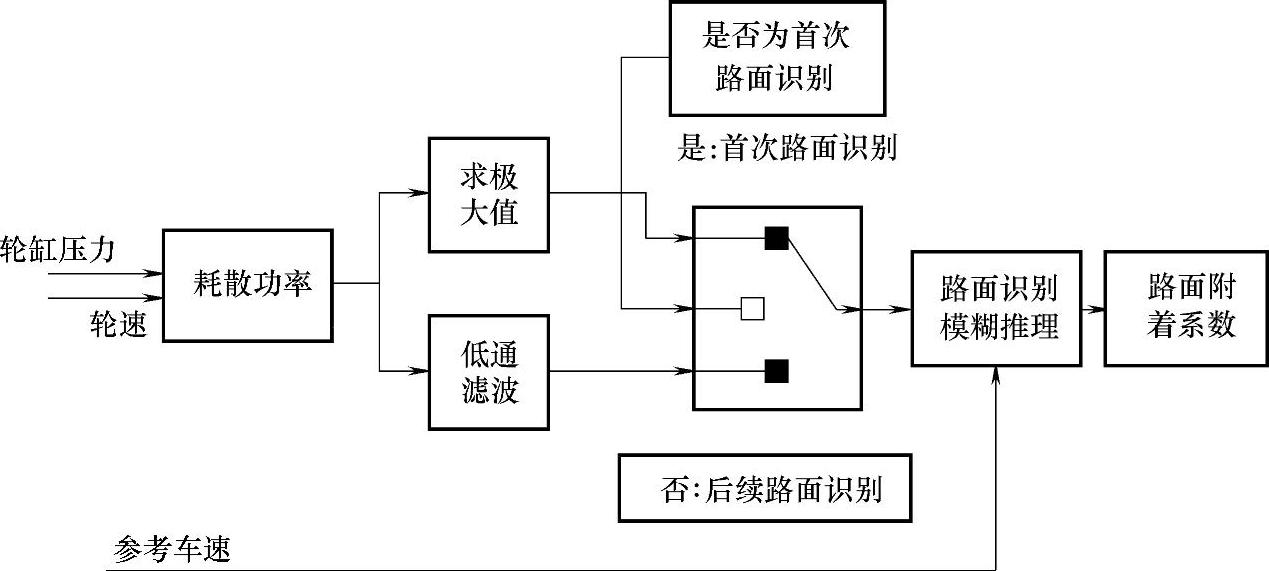
图3-45 路面识别算法框图
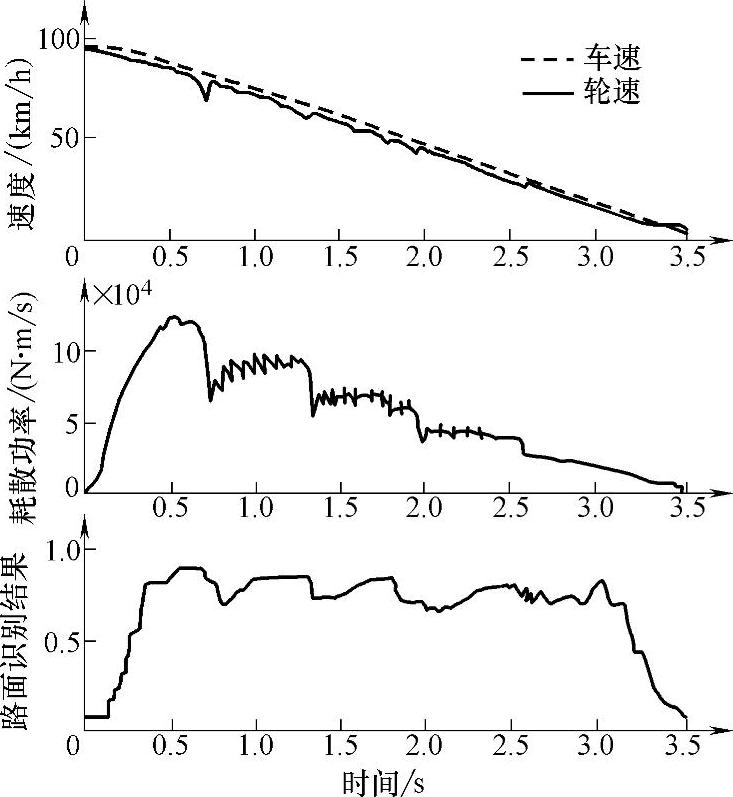
图3-46 高附着路面上稳控系统路面识别
图3-47所示为车辆在对接路面上进行稳控系统制动的情况,对接路面情况为由0.8左右的高附着路面过渡到0.15左右的低附着路面,识别结果与实际路面状况基本一致,在路面切换时,可以及时识别出路面附着系数的跳变。
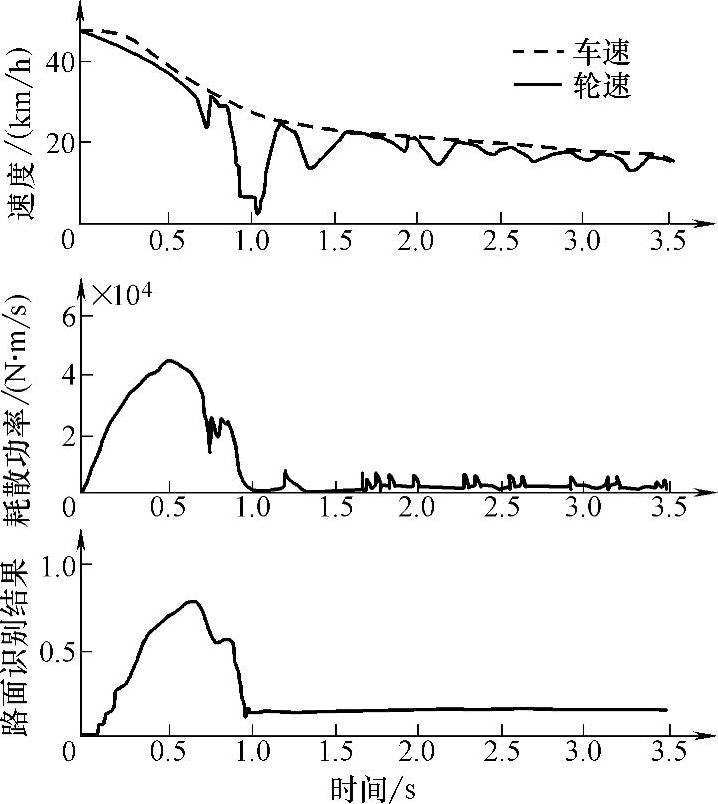
图3-47 对接路面上稳控系统路面识别
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。