



目前人们进行健身多采用两种途径进行,一是在专业的健身房办理会员卡,定期利用那里系统先进的健身设备及教练指导资源进行锻炼;二是购买健身教学书籍或视频,在家中利用简单的器械自我进行锻炼。在这两种情况中,前者往往花费十分昂贵,一张健身月卡动辄就要上千元,聘请私人教练指导健身更是属于少数人可以享受的奢侈服务;后者又往往由于缺少专业的健身器材与正确的指导而事倍功半,甚至无功而返。以上两种健身方式均有难以避免的弊端。因此,如何找到一种合适的健身途径,既能够让使用者享受到专业健身器材的使用感受与私人教练般的一对一指导,又可以降低健身成本,让普通大众可以接受,是目前健身领域急需解决一大难题。
现在市场上可以购得的健身器械基本分为两大类:重物类健身器与弹性元件类健身器。前者以哑铃、杠铃及框架牵引健身器为代表,哑铃、杠铃尽管价格低廉,但用其可以得到锻炼的人体部位却往往有限,而且缺乏保护作用;框架牵引健身器尽管更加专业,而且可以对哑铃无法锻炼到的部位进行弥补,但往往体积大,价格高,非一般家庭所适用。一套组合“框架牵引”健身器,少则三四千元,多则上万元。尤其应当指出的是,重物类健身器有其特别的劣势,即往往需要上百公斤配套的金属重物。这在运输与安装过程中是极其不便的。弹性元件类健身器小巧轻便,且没有累赘的重物,有其一定的优势,但由于其运动阻力往往为变力,且其阻力大小与人体肢端位移的变化关系缺乏人体构造学上的科学匹配规律,往往不为专业的健身人群所接受,因此多数沦落为“电视购物”的牺牲品。以上两类健身器,均有其不可弥补的弊端。在此情况下,若能设计出一种将两类健身器优点集于一身,即不需要累赘的重物,又节省空间,还能实现符合人体工程学阻力变化规律的健身机械,定将会受到健身界尤其是青年健身爱好者的普遍欢迎。
随着信息技术的飞速发展,“智能健身”已经成为健身领域发展的必然趋势。如何整合使用者的个人肢体信息,为其量身打造科学合理的健身计划;同时在其进行健身时通过电子系统给予其专业的动作指导与保护,最大程度上提高健身的效率,并减少受伤的发生概率,这些问题均可以通过健身器材的机电一体化控制得到圆满的解决。
同时我们应注意到,这样一种能够满足人们健身需要,同时结合机电一体化技术,具有一定“智能”的健身用品,其本身的工作原理也将满足医疗保健中牵引类康复器械的各项性能需要,在针对中老年人与瘫痪病人的康复治疗中同样有着广阔的应用前景。
1.国内外研究现状与发展趋势
“外骨骼”类机械的历史由来已久,早在上世纪60年代就有一些国家提出了“外骨骼”助力设备的设计构想,并制造了原理样机。但是受到当时制造水平与电器元件性能的制约,这一构想没有能够在当时得到完整实现。
随着社会整体工业水平的进步,时至今日,世界各国已经涌现出多款“外骨骼”产品或原理样机。其设计目的与工作机理各不相同,均有独到的特点。但总的来说目前已有的“外骨骼”可以分为三大类别。
(1)助力型“外骨骼”机械 此类外骨骼以增强人类能力为目的,以电气或液压驱动元件作为辅助人类运动的施力件,弥补使用着自身力量的不足,从而大幅度提升人类的行动能力。但由于其特殊的功效性,此类外骨骼往往用于军事领域,作为一款新兴的高科技军事装备出现。如美国洛克西德马丁公司的HULC下肢外骨骼(见图9-1)、雷神(SARCOS)公司的XOS2全身助力外骨骼(见图9-2),均是此类机械的代表。

图9-1 洛克西德马丁公司的HULC下肢外骨骼

图9-2 雷神公司的XOS2全身助力外骨骼
(2)康复型“外骨骼”机械 由于“外骨骼”器械对人体独特的“随动”特性,使得其在医疗康复领域得以得到长足发展。以英国萨福德大学与美国华盛顿大学的康复型外骨骼为例。他们分别在上肢设置了极其复杂的机械结构,以拟合人体极其复杂的生物运动。在机械的各运动副处,分别设置了小力矩电动机,用于牵引使用患者的肢体。但这种器械往往因为过于追求拟合人体运动、结构过于复杂,而变得维修困难,价格昂贵,很难被一般消费者接受。
(3)操纵型“外骨骼”机械 由于“外骨骼”的“随动”特性,使得这类器械成为一种极其高效的人机互动机器人。通过采集人类肢体动作,与对相应运动副施加阻力,使得此类“外骨骼”具有很强的人机交互性。使用者能够不断通过运动自己肢体来为计算机提供实时控制信号,控制其他工作环境下的机器人终端,或者在虚拟现实中运动自己虚拟的“肢体”。此类作品的典型代表是韩国科技大学的“机器人控制臂”与意大利比萨圣安娜大学的“控制与虚拟现实触觉回馈外骨骼”。
2.项目研究目标与内容(https://www.xing528.com)
本项目将针对现今健身与康复器材的种种缺点与不足,将“外骨骼”机器人概念引入健身与康复器材领域,自主设计开发一款基于操纵灵活、作用可靠、协调能力强、适应范围广的穿戴式健身与康复器械。以电动机为施力元件,通过合理的结构设计,精确贴合人体各部位运动,并具有智能控制功能。让健身不再受到器械繁多、重物冗余、姿势不标准、请教练昂贵等条件的制约,使得使用者能够在较小的空间内(如家庭室内)进行全面、专业的健身锻炼。同时,所设计的智能健身机械应具有一定的康复牵引功能,可供瘫痪病人或老人在空间较小的室内(如家庭中)进行康复性治疗。其初版设计虚拟样机如图9-3所示。
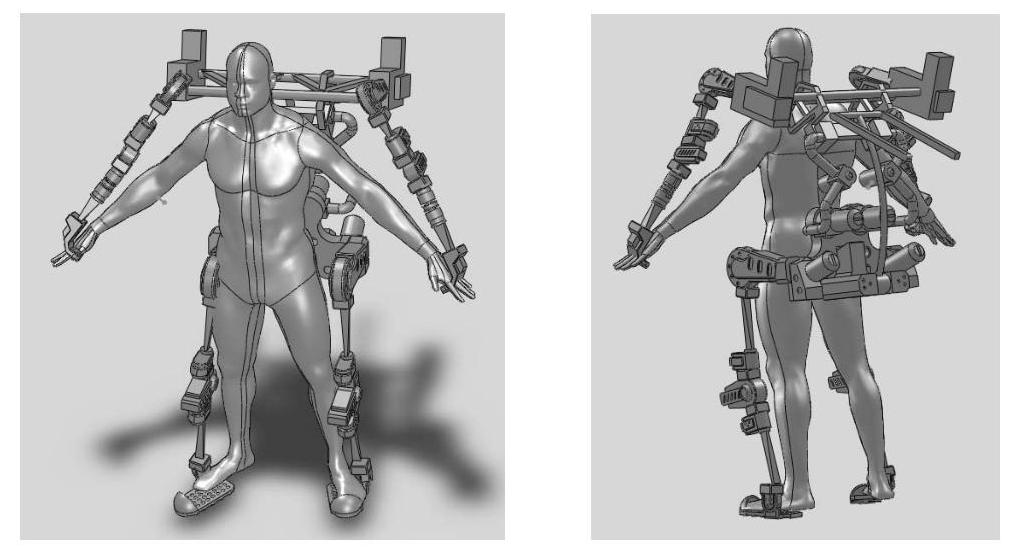
图9-3 “外骨骼”智能健身与康复机器人初版设计虚拟样机
“外骨骼”智能健身与康复机器人,将是一款具有一定智能的高度机电一体化产品,改变人们对以往健身器的局限认识,打开健身康复器械的新疆域,为此类器械的设计提供革命性的崭新思路。
“外骨骼”智能健身与康复机器人应具备以下使用功能:
1)采用电动机作为施力元件,不用重物或绳索、弹簧等弹力元件进行人体肌肉力量训练。
2)随着锻炼效果的逐步显现,器械的阻力载荷可实现小单位过渡增加(如以500g为一个增加单位)。
3)不受重力制约,人体同一部位运动到不同姿势时,器件施加阻力的大小及变化趋势可随意调整。
4)采用“穿戴式”设计,从根本上解决肌肉锻炼时“器械不全”的限制。用一套设备可实现人体在任意姿势下任何动作的锻炼,功能相当于一个专业健身房所有器械的总和。
5)拥有“器械肢体长度调整”功能,可根据不同身高使用者的需求自如调整各关键部位的尺寸,如四肢、躯干处机构长度。
6)具有“智能教练”功能。本作品可以通过附着式穿戴,矫正使用者锻炼时不正确的姿势,从而避免不科学锻炼可能造成的伤害。同时,控制系统还可以根据用户需求,为其量身打造锻炼计划。如各个姿势的锻炼顺序、每个姿势的动作数目、各个动作的力度变化等。
7)具有“安全保护”功能。该功能主要体现在“关节运动限位”、“超负荷急停”与“防倾倒安全绳”机制上。“关节运动限位”可以限制器械中各转动副的运动范围,使其与人体关节的运动范围相对应,从而避免对使用者造成伤害。“超负荷急停”机制可以在使用者出现“力不从心”无法健身动作时,紧急将健身器的负载变为0,并停在当前姿势处,防止其造成传统健身器材使用时十分常见的“运动伤害”情况。“防倾倒安全绳”机制则可以在使用者出现难以保持重心,即将穿戴器械坠地的情况下,像安全带一样及时从上方拉紧器械整体,从而避免因器械自重而在坠地过程中对使用者造成的伤害。
8)具有简单的运动姿势教学功能,如投篮、游泳、网球挥拍、高尔夫挥杆等动作的示教功能,通过“穿戴式”设计让使用者切身体验标准动作,加快学习速度。
9)具有丰富的人机互动功能,整合机电一体化技术与无线网络技术及Android操作系统,设计智能友好的控制界面,实现良好的人机交互功能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。