



1.驱动结构的设计及功能的实现
项目组经系统研究和深入探索,设计了一种能够在崎岖路面或复杂地形条件下机动行驶,具有较高机动性和较强越障能力的搜救机器人驱动装置,目的是在保证机器人具有高机动性和强越障力的同时,克服传统驱动及传动系统零件众多、结构复杂、效率低下的缺点,降低系统能耗,节省内部空间,减轻整体重量,提高机器人的工作可靠性和行驶稳定性,为搜救机器人驱动装置提供新的设计方案和新的技术途径。
为解决上述技术问题,搜救机器人采用的技术方案是:设计搜救机器人驱动装置,包括箱体、左右对称布置的行走驱动装置、摆臂驱动装置和摆臂组件。其中行走驱动装置位于箱体后部,包括左右对称布置在箱体两侧的主动轮、从动轮、行走履带。主动轮内部套有行走驱动电动机,行走驱动电动机在驱动主动轮转动的同时起到主动轮轴的作用;行走驱动电动机输出端插入主动轮联轴器中,并通过紧定螺钉和键带动联轴器转动,主动轮联轴器通过键连接带动主动轮,主动轮外侧设有弹性挡圈;行走驱动电动机通过紧定螺钉固定在移动座中,移动座可以在箱体后部的主动轮轴固定座中前后移动,从而调节主动轮的前后位置,起到张紧调节的作用。摆臂驱动装置包括布置在从动轮外侧同轴的摆臂轮,从动轮通过绕轮轴周向对称布置的四根摆臂轮同步销带动摆臂轮,保证摆臂轮与从动轮转速相同;摆臂轴座贯穿从动轮和摆臂轮中心,并且通过螺钉固定在箱体侧壁上;摆臂轴座中套有摆臂驱动电动机,电动机输出轴通过摆臂联轴器带动摆臂组件转动。摆臂履带组件包括内臂、外臂、摆臂张紧组件,前段支板,摆臂小轮和摆臂履带,其中内臂套接在从动轮和摆臂轮之间;外臂转动中心与摆臂轮同轴,且与摆臂联轴器固连;摆臂张紧组件连接了内、外臂及前段支板,对摆臂履带起张紧作用。
行走驱动电动机输出轴的外端面与主动轮外侧平齐,最大限度地减少了行走驱动电动机在箱体内所占的空间;摆臂驱动电动机完全包含在摆臂轴座中,节省了空间;移动座通过与移动座盖板固接形成工字滑块,进而嵌入主动轮轴固定座和箱体侧壁形成的导轨中;主动轮轴固定座的两端各有一根紧定螺栓,用于限定移动座的位置,进而限定主动轮的张紧位置,实现对行走履带的张紧;从动轮和摆臂轮之间还装有两个隔圈,对装的隔圈固定了摆臂轴承的位置;摆臂轮同步销贯穿两个隔圈,且其两端分别插入从动轮和摆臂轮中;摆臂张紧组件包括固定在内臂和外臂之间的顶紧座,两根导向轴插入顶紧座中,滑动座插入两根导向轴中,并可沿导向轴移动,滑动座通过紧定螺钉限定其与导向轴的相对位置,两个前段支板固定在滑动座的两端,摆臂小轮安装在前段支板的最前端。
该设计的优点是:电动机作为主动轮轴,对主动轮起到支撑、定位和驱动的多重作用,简化了传动机构,省去了传统传动方式中的轴承件,减轻了驱动装置的重量;此外,主动轮与摆臂都是由驱动电动机直接驱动,省去了烦琐的传动机构,最大限度地节省了空间,降低了系统故障率,为移动机器人进一步小型化、轻量化提供了解决方案。
下面结合结构图对本设计原理做进一步说明。
搜救机器人总体结构如图2-11所示,该机器人是一种小型六履带全地形移动机器人,由两套行走驱动装置、四套摆臂组件以及机身框架组成。机器人两条行走履带3.9左右对称布置,覆盖了机器人机身框架的上、下、前、后表面,驱动电动机、控制系统及动力电源都包含在被行走履带3覆盖的机身框架内;两套行走驱动装置位于摆臂驱动装置13和摆臂驱动装置12的内侧;机器人前后端各安装了两个左右对称布置的摆臂,摆臂履带5.8与行走履带3.9的线速度相同,在翻越障碍时,四个摆臂可以起到支撑、攀附的作用;机器人上部还装有承载平台10,可用于安装各种设备附件。搜救机器人行走驱动装置分解图如图2-12所示。如图2-13、图2-14所示,所述摆臂驱动装置、或摆臂驱动装置、或摆臂驱动装置、或摆臂驱动装置,包括摆臂电动机、摆臂驱动链轮16、内轴套14、外轴套17、摆臂杆13、摆臂小轴、摆臂小链轮2、摆臂大链轮1以及若干标准件;摆臂大链轮1安装在摆臂杆13前端的摆臂小轴18上;内轴套14、摆臂驱动链轮16、外轴套17和摆臂杆13依次通过螺栓串接固连在一起,并通过轴承套接在主轴6上,其中内轴套14穿过机身侧板4,两者之间套有轴承,这样可以保证摆臂相对于主轴6和机身侧板4自由转动;摆臂电动机15固定在机身侧板4内侧,且其输出轴穿过侧板4;摆臂电动机15通过链传动带动摆臂驱动链轮16转动,从而带动摆臂杆13转动,进而完成机器人摆臂的转动;摆臂小链轮2与行走链轮8外径相同,且通过键连接套接在主轴6外端,与主轴6同步转动,因此摆臂小链轮2可带动摆臂履带5与行走履带3保持相同的线速度;摆臂驱动装置、或摆臂驱动装置、或摆臂驱动装置、或摆臂驱动装置与摆臂履带5组成摆臂组件。
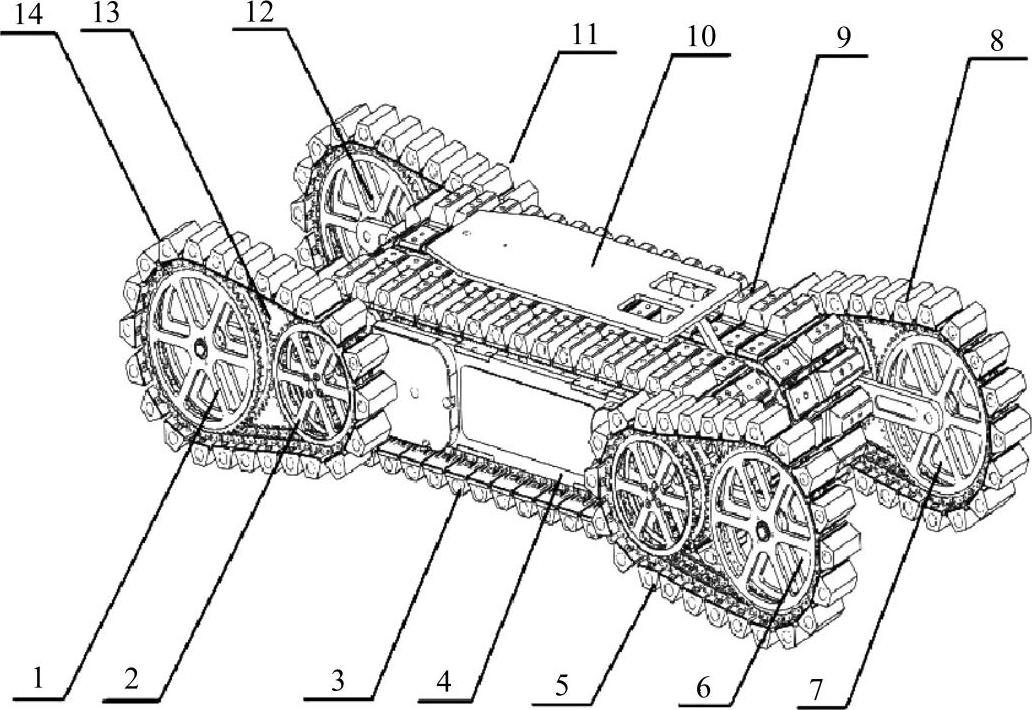
图2-11 搜救机器人总体结构
1—左前摆臂大链轮 2—左前摆臂小链轮 3—左行走履带 4—左侧板 5—左后摆臂履带 6—左后摆臂驱动装置 7—右后摆臂驱动装置 8—右后摆臂履带 9—右行走履带 10—承载平台 11—右前摆臂履带 12—右前摆臂驱动装置 13—左前摆臂驱动装置 14—左前摆臂履带
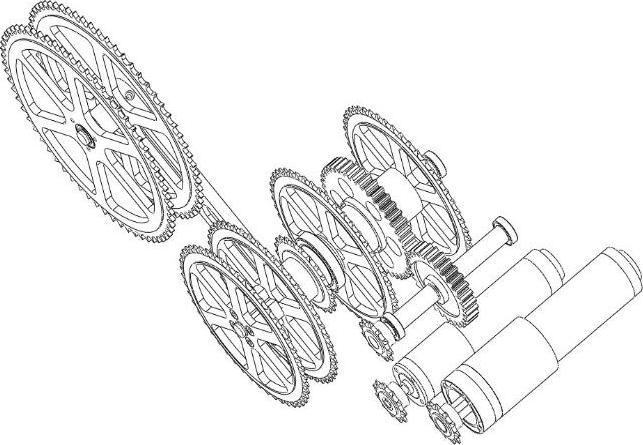
图2-12 搜救机器人行走驱动装置分解图
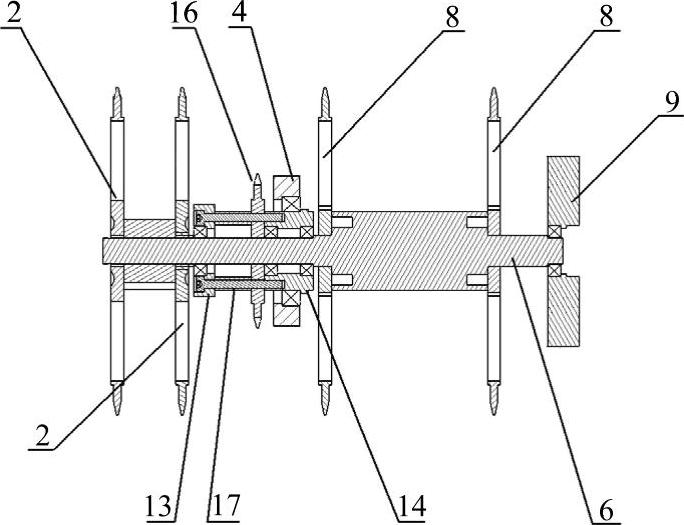
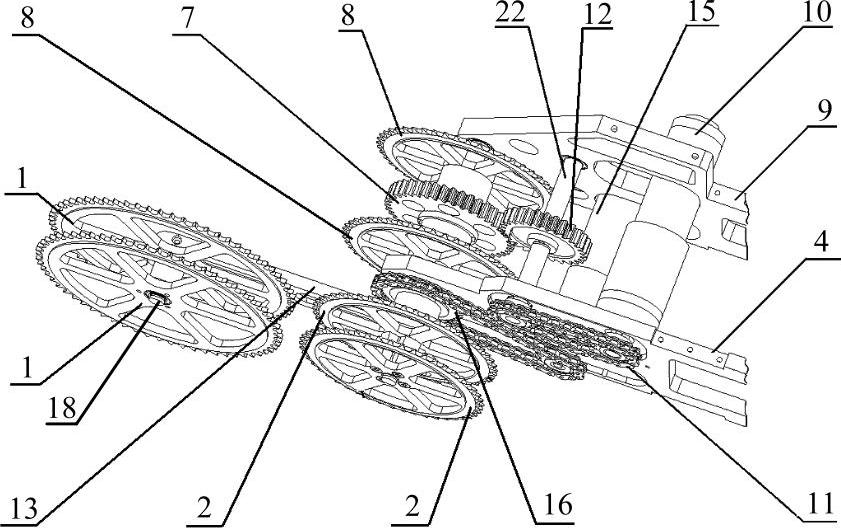
图2-13 搜救机器人摆臂、行走驱动装置结构
 (https://www.xing528.com)
(https://www.xing528.com)
图2-14 搜救机器人摆臂组件结构
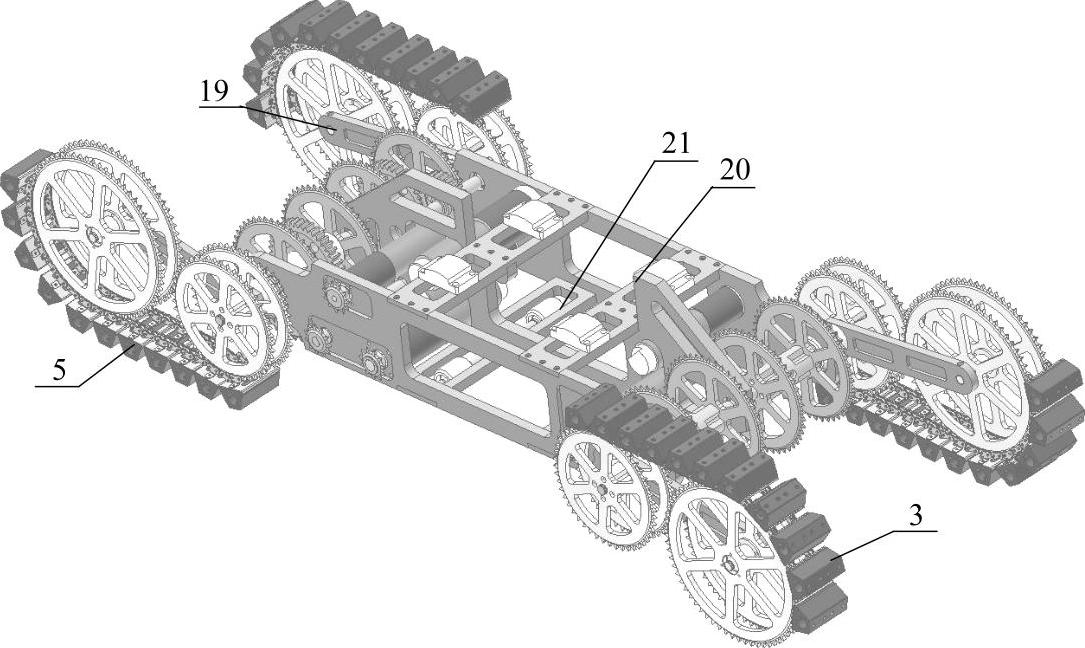
图2-15 搜救机器人内部结构
图2-13、图2-14和图2-15中:1—摆臂大链轮;2—摆臂小链轮;3—行走履带;4—侧板;5—摆臂履带;6—主轴;7—大齿轮;8—行走链轮;9—基板;10—行走驱动电动机;11—行走链传动系;12—小齿轮;13—摆臂杆;14—内轴套;15—摆臂电动机;16—摆臂驱动链轮;17—外轴套;18—摆臂小轴;19—连接板;20—履带垫块;21—履带滚轮;22—小轴。
2.结构造型改进方案
为了降低整个搜救机器人的重心,改善其稳定性,放弃原来将总控平台置于龙骨上方的置放方案,将总控平台放置于搜救机器人底盘上,其中包括视频卡、风扇、电池、电源控制板等。同时将驱动器、摄像头、超声波设备等都置于履带上方。因此,就必须设计一个驱动控制箱。要求能安装6个驱动器,方便检修,同时降低高度。
为了解决这个问题,采用了将一个铝板直接通过5个螺钉孔固定在龙骨上(龙骨上配打5个孔),同时为了加强连接强度,再用角铝做成角撑,加强龙骨和铝板之间的强度(图2-16中未画出)。另外,在铝板上打6个孔,用塑料软管将6个驱动器的线分别通过这6个孔,从底盘通到控制箱。控制箱示意图如图2-16所示,驱动器是通过螺钉直接固定在铝板上,便于散热,从6个孔里伸出来的线一一对应于各个驱动器。
为方便检修,将控制箱设计成可拆卸式。上盖板如图2-17所示,通过两边的两个槽,套扣至铝板上边的两个突起。铝板和上盖板之间的连接可通过橡胶缓冲垫,起减震作用。为了达到更好的通风散热的效果,将铝板的左右两边制成中空。
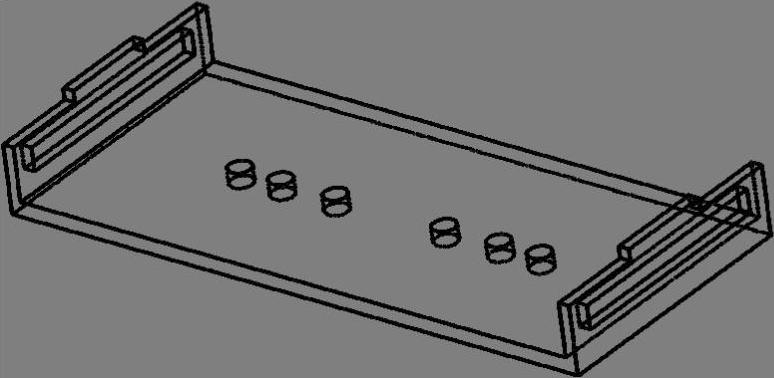
图2-16 控制箱示意图
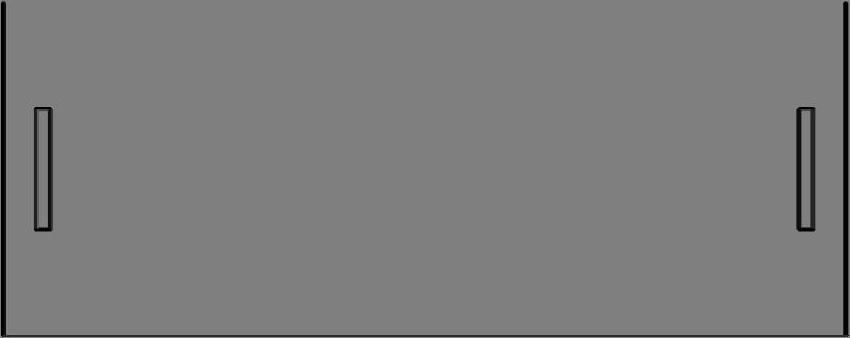
图2-17 箱体上盖板
为了使底盘能为安放各种控制卡提供足够的空间,利用结构上调整和叠放组装控制卡等方法,将底板降到最低,将各种控制板尽可能集成,从而能够更多的控制单元置于底盘上,提升机器人整体性能。
在进一步的改良方案中,将对机器人现有传动方式进行改进。目前的机器人传动方式采用的是链传动,以后将尝试采用具有传动更平稳、效率更高的同步带传动。作为一个智能履带式机器人,其控制必须非常精确,而控制的精确首先必须基于仿真结果提供的数据尽可能准确。智能搜救机器人的仿真最重要的是履带参数的设定,包括阻尼参数和刚度系数等。需要通过仿真得到的结果包括电动机的输出转矩和转角,智能搜救机器人的越障能力、转弯能力、加速性等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。