



回转控制指令是FANUC专门为加工中心刀库、数控车床刀架以及工作台分度等回转控制设计的功能指令,指令可根据所需的目标位置及当前位置,输出转向、剩余位置等数据,供回转控制的PMC程序使用。
PMC的回转控制指令有十进制回转控制ROT和二进制回转控制ROTB两条,在早期的FANUC系统上,M/T/B等辅助机能代码输出为十进制(BCD码)格式,故使用ROT指令的情况居多;而FS-0iD等CNC的M/T/B等辅助机能代码输出为二进制,故使用ROTB指令更为方便。
1.十进制回转控制指令
十进制回转控制指令ROT的编程格式如图8.3-10所示,指令的编程要求如下。
1)控制条件。ROT指令需要定义如下控制条件。
RN0:回转计数起始值选择。RN0=0时计数起始值为0;RN0=1时计数起始值为1。
BYT:回转体的参数范围选择。BYT=0为1字节两位BCD码1~99;BYT=1为2字节四位BCD码1~9999。
DIR:捷径选择功能定义。DIR=0时捷径选择功能无效;DIR=1时捷径选择功能有效。
POS:定位目标选择。POS=0时以指令中的目标位置值为定位目标;POS=1时以指令中的目标位置的前一位置作为定位目标。
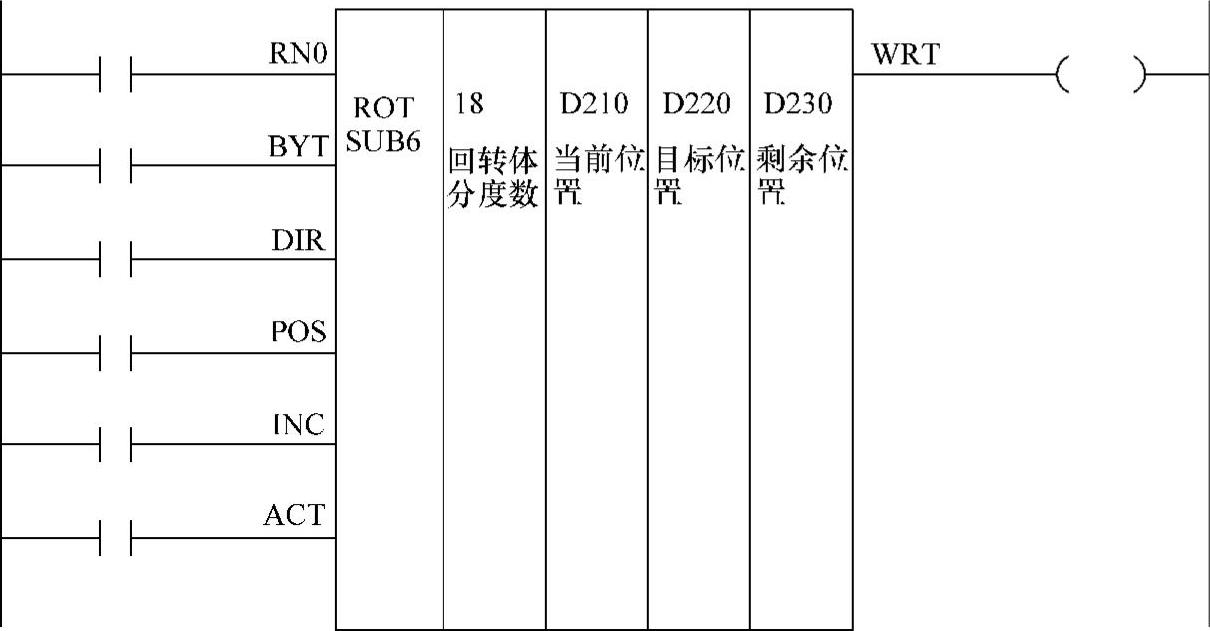
图8.3-10 ROT指令的编程格式
INC:剩余位置的输出形式选择。INC=0为绝对位置输出,直接以定位目标位置作为剩余位置输出;INC=1为增量位置输出,剩余位置输出值为从当前位置到定位目标需转过的回转体分度位置数。
ACT:回转控制指令启动信号。该信号一般采用边沿信号。
2)参数。ROT指令需要定义如下参数,参数需要以十进制(BCD码)的形式给定。
回转体分度数:以常数形式给定的回转体一转的分度位置数,例如,对于1°分度的转台应定义为360等,对于18个位置的刀库应定义为18等。
当前位置值:给定回转体当前的位置值(绝对值),当前位置值应以存储器地址的形式给定,例如,字节型的输入、数据存储器D或内部继电器R等,图中为数据寄存器D210。
目标位置值:给定定位的目标位置值(绝对值),目标位置同样可以用常数或存储器地址的形式给定,图中为数据寄存器D220。(https://www.xing528.com)
3)执行结果输出。ROT指令的执行完成后可输出如下结果。
剩余位置:根据控制条件INC的定义,可输出目标位置值或需要转过的分度位置数。
WRT:转向输出。捷径选择功能有效时,WRT可自动选择距离最短的回转方向,WRT=0为正转、WRT=1为反转。如捷径选择功能无效,WRT输出为0(正转)。
2.二进制回转控制指令
二进制回转控制指令ROTB的控制条件、参数及指令的作用、功能均与ROT类似,指令的编程格式如图8.3-11所示。
ROTB指令和ROT指令在使用上主要有如下区别。
1)ROT指令中的回转体分度数需要以常数的形式指定,改变分度数需要修改PMC程序,但ROTB的回转体分度数使用存储器地址,故可通过MDI/LCD面板的设定,在不修改PMC程序的情况下直接改变。
2)ROT指令中使用的参数为十进制格式(BCD码),而ROTB中使用的参数为二进制格式,因此,对于FS-0iC/D等M/T/B代码为二进制输出的CNC来说,利用M/T/B代码定义目标位置时,不需要进行数据格式的转换。
3)ROT指令中可控制的回转体最大分度数为9999(2字节BCD码),而ROTB最大可以控制的分度位置数为4字节二进制值4294967295(232-1),其控制范围更大。
4)ROT指令的参数范围通过控制条件BYT进行定义,ROTB则通过指令参数进行定义。指令中的数据格式参数的定义方式如下。

图8.3-11 ROTB指令的编程格式
1:1字节二进制数;
2:2字节二进制数;
4:4字节二进制数。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。