



二足步行机构是仿人机器人的重要组成部分,也是设计非常困难的部分。下面主要介绍二足步行机构的建模、控制、分类及目前二足步行机构设计存在的问题。
1.二足步行机构的建模
(1)二足步行机构的步态分析 二足步行的步态是指仿人机器人在步行过程中,它的各个关节在时序和空间上的一种协调关系,通常是由各个关节运动的一组轨迹函数来描述。稳定的二足步行是一个重复性过程和周期性运动,一个周期的运动分为单脚支撑阶段、双脚支撑阶段、脚-地碰撞状态。单脚支撑阶段是指仿人机器人的一条腿与地面接触(称为单撑腿),重心落在该腿,而后一条腿则由后往前摆动(称为摆动腿),这个运动阶段称为平滑动态阶段。单腿支撑阶段起始于摆动腿脚尖离地,结束于摆动腿脚跟着地。双脚支撑阶段是指仿人机器人的两腿均与地面接触,重心由支撑腿向摆动腿移动,两腿互换角色。双脚支撑阶段起始于前脚脚跟着地,结束于摆动腿脚尖离地。一个步行周期是指仿人机器人的左、右脚各完成一步行走运动所用的时间,是单脚完成运动所用时间(即单步周期)的两倍。二足步行机构的步态分析是二足步行机构建模的基础。
(2)二足步行机构的稳定性判据 二足步行机构的稳定性判据,一般采用前南斯拉夫学者Vukobratovic和Juricic提出的零力矩点判据(ZMP)。它是二足步行机构建模的依据和稳定步行的判据。零力矩点判据的存在是以二足步行机构的动态平衡为前提的,即二足步行机构的动态平衡满足以下两个前提条件:
∑Mx=0,∑My=0
即仿人机器人所受的力矩之和在水平面上的ZMP达到平衡。
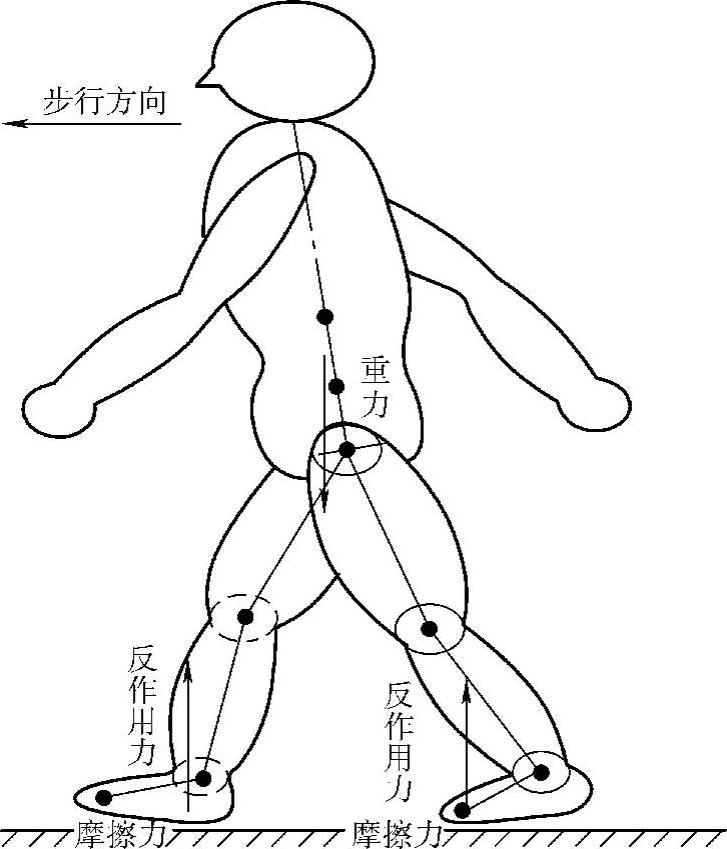
图9-21 仿人机器人模型
(3)二足步行机构模型建立 二足步行发生在地面上,受地面状况的影响。仿人机器人是一个受环境单边约束的系统,它只能被动地接受地面反作用力的作用。如图9-21所示是一个仿人机器人模型,可以看到,它的二足步行运动是地面反作用力、摩擦力、重力等多个力作用产生的。它需要通过传感器获取各种力的大小、方向以及地面的粗糙程度、是否有障碍物等,然后通过控制器驱动仿人机器人运动,实现二足步行,如图9-22所示。
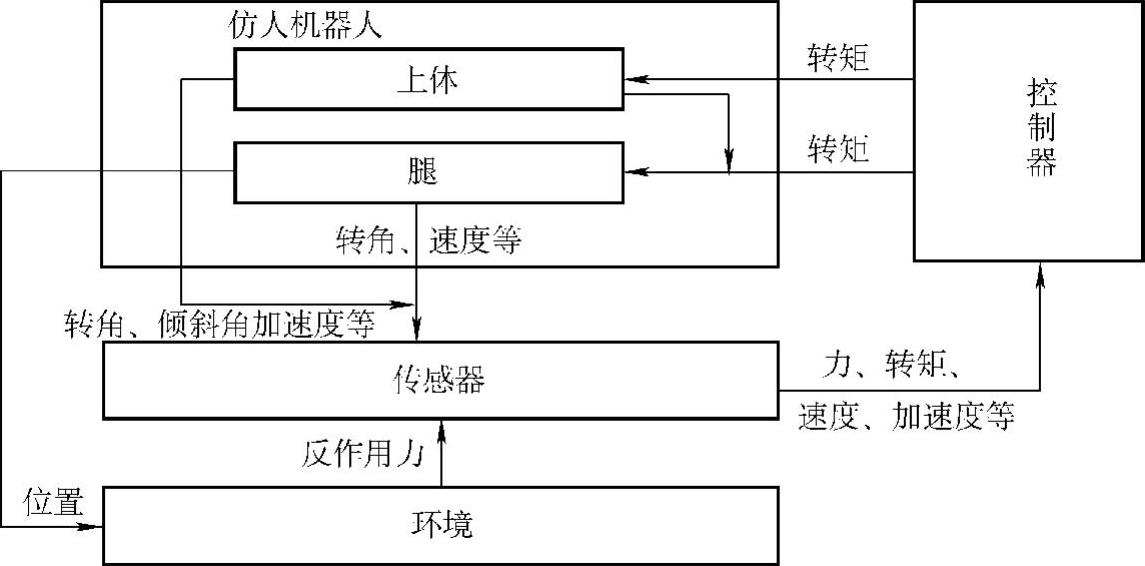
图9-22 二足步行模型
2.二足步行机构控制
在现实条件下,仿人机器人步行运动的实现总是伴随有干扰,实际运动和参考运动之间总会存在偏差,关节轨迹和参考轨迹的偏差会导致零力矩点判据与其参考之间的偏差。当零力矩点判据非常接近于支撑区域边缘的时候,仿人机器人就会失去平衡,开始沿角的边缘转动或倾倒下去。所以,二足步行的控制任务就是要保证所有驱动的关节都接近其参考轨迹,同时始终维持动态平衡。
为了更好地理解二足步行的控制问题,需要考察三种典型的步行情况。在这三种步行情况下,都假设仿人机器人在初始状态下按照参考运动运行,然后受到了干扰的作用。
1)外部干扰力度较小。这时,尽管理想的运动状态与参考运动吻合的运动受到干扰,同样零力矩点判据的位置也被改变了,但是零力矩点判据仍然在完全的支撑区域内。可以采用适当的控制方法,使仿人机器人恢复到参考运动状态。
2)外部干扰力强度中等。这种情况下,干扰同样使步行偏离了参考轨迹,也增大了零力矩点判据与其参考位置的偏差。为了维持动态平衡,仿人机器人需要采取更加有效的手段,例如摆动手臂以保证零力矩点判据仍然在安全的支撑区域,从而使仿人机器人的运动逐渐回到参考轨迹上。
3)外部干扰力强度很大。此时会出现没有驱动的自由度,整个仿人机器人开始出现绕支撑脚边缘发生转动的趋势。在这种情况下,试图减小关节轨迹和参考轨迹之间的偏差,并且使仿人机器人回到参考运动的努力都是没有意义的,因为仿人机器人已经失去了平衡。因此,保持或者重建动态平衡成了最大的问题,不再考虑关节和参考运动之间的关系。这时,仿人机器人不得不放弃理想的运动状态,采取一些紧急措施,例如朝着摔倒的方向向前迈一大步,防止摔倒,然后再通过接连几步的调整,逐渐地回到参考运动上来。
在上述三种情况下,二足步行的控制要能够减小实际仿人机器人运动与其参考运动之间的偏差,同时保持动态平衡。因此在第二种,尤其是第三种情况下,首要任务就是阻止仿人机器人摔倒。(https://www.xing528.com)
事实上,小强度干扰非常普遍,使得二足步行的控制问题通常集中于这个方面。在小强度干扰下,控制的任务是使每一个关节的偏差最小化,并使仿人机器人的运动接近参考运动,实际的零力矩点判据趋近于参考零力矩点判据。然而,补偿动作也给关节带来了负面影响,那就是改变了关节的加速度(和参考不同),进而改变了惯性力的大小和方向,再就是影响零力矩点判据的位置。这校正了内部协作,却也因此改变了外部协作。为了阻止无驱动自由度的出现,需要不断测量实际的零力矩点判据位置,并且尽可能将之与参考轨迹接近。对于小强度干扰的情况,可以考虑从以下两个方面来补偿实际运动与参考运动之间的偏差:
①利用每个关节的局部反馈,使每个关节的运动尽可能地接近参考运动,不过需要特别注意补偿的强度。也就是说,防止因补偿使得关节加速度和参考出现偏差。
②联合一个或者几个关节的运动,以防止零力矩点判据出现在支撑区域的边缘,可以牺牲某一个关节的运动来补救零力矩点判据的偏差。
3.二足步行机构的分类
根据控制方法(步态生成和步行控制)的不同,可以将现有的仿人机器人二足步行分类如下。
(1)静态步行 预先规划关节轨迹和零力矩点判据轨迹(规划完成的轨迹称为参考轨迹),并将参考轨迹应用于二足步行机构,使仿人机器人按照设计好的轨迹步行。对于运动过程中不可避免的误差,这类方法是通过控制各个驱动关节,将误差降至最小;并且尽可能使零力矩点判据维持在脚-地接触的支撑多边形内,以防止仿人机器人摔倒。这种方法很明显就是为了步行而步行,更大的意义应该在于验证二足步行机构的合理性。当大干扰出现时,兼顾腿的轨迹和零力矩点判据轨迹就很困难了。
(2)动态步行 动态步行尚无统一的说法。为了使仿人机器人能够更加适应环境,根据“地面”反馈的信息和仿人机器人的中心等参数来实时地规划关节运动轨迹,从而使仿人机器人在未知环境中稳定行走的二足步行都属于动态步行。和静态步行一样,动态步行也需要规划,不同之处是动态步行规划是规划完成既定的功能动作,例如双腿的动作,而其他关节动作则是实时生成的。本节研究的二足步行属于动态步行的范畴。
(3)基于生物特征的步行 这类步行的代表是RunBot。该类步行结构非常简单,由一个模拟人类的神经控制反射的程序来控制。因此,这类步行没有用很多的传感器,而且其传感器只做两件事:第一是判断何时肢端碰到了地面,第二是何时需要迈出另一条腿。从步态的生成角度来看,基于生物特征的步行也是一种动态步行,只是它的步态完全根据环境和自身的物理特征生成。加入了机器学习功能的RunBot使得仿人机器人可以在环境中学习,使步行越来越稳定,越来越快。
目前,二足步行机构的研究主要集中于上述第二类动态步行。根据对二足步行机构动力学知识的依赖程度,步态的生成分别采用基于零力矩点判据的方法和基于倒置摆模型的方法。基于零力矩点判据的方法需要二足步行机构动力学的精确知识,包括各部分重量、质心位置、连杆的转动惯量等;基于倒置摆模型的方法更多地依靠反馈,因为控制器很少需要知道仿人机器人的结构。由于基于零力矩点判据的方法能够精确地按照参考轨迹生成步态,而基于倒置摆的方法则需要较少的仿人机器人知识,所以也出现了将两种方法结合起来生成步态的方法。
4.二足步行机构的主要问题
根据以上对二足步行机构的分析不难发现,虽然导致二足步行机构的研究进展缓慢的原因很多,但是不外乎以下四点:
1)仿人机器人自身的不稳定性。在无电动机驱动力的条件下,仿人机器人根本无法维持其直立姿态;而在有电动机驱动力的条件下,只有仿人机器人的中心在地面的投影落在脚底(远离脚的边缘),同时零力矩点判据落在支持多边形区域内,仿人机器人才有望维持稳定步行,否则,仿人机器人无法维持步行的趋势,自然会摔倒。
2)二足步行机构是一个非线性的混合系统。目前,很多研究把仿人机器人建模为倒置摆模型,也有一些研究把它与振动阻尼器比较。诚然,二足步行机构受地面约束,摆动腿前后运动进而带动身体摆动的现象非常类似于倒置摆;同时,二足步行机构在落脚时与振动阻尼器相似。但是,二足步行机构与它们根本的区别在于,它与地面的接触是不受约束的,即它可以根据需要选择落脚点。这表明二足步行机构不是一个简单的线性系统,而是一个复杂的混合系统。有的研究把它视为互补松弛系统。
3)系统受到来自地面条件的约束。步行离不开地面这一事实,使得对稳定步行的研究变得更加复杂。在地面的动力学特征未知的情况下,实现仿人机器人的稳定步行变得非常困难。
4)对人类步行的原理尚未完全理解。尽管目前研究认为,人类步行是由脊髓的中枢模式发生器(Central Pattern Generator,CPG)控制的,但是这种把步行看作是由中枢模式发生器控制的观点也是建立在把步行机构简化为像范德波尔方程(Vander Pol Equation)一样具有很多约束条件的非线性系统。
从上述四点讨论不难看出,二足步行机构的研究具有很高的难度,并且有很大的研究空间。二足步行机构的控制实际上包括运动规划和动态步行控制两部分。实现二足步行,首先要规划参考运动。由于步行过程中,干扰不可避免和脚-地碰撞周期性的发生,故需要通过采用合适的控制方法,调节驱动装置的转角,使仿人机器人的运动轨迹尽可能地收敛到参考运动上来。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。