



运动是生物的最主要特性,而且往往表现着“最优”的状态。据调查,地球上近一半的地面不能为传统的轮式或履带式车辆到达,而很多足式动物却可以在这些地面上行走自如。这给人们一个启示:有足运动具有其他地面运动方式所不具备的独特优越性能。
1.有足动物腿部结构分析
有足运动具有较好的机动性,其立足点是离散的,对不平地面有较强的适应能力,可以在可能到达的地面上最优地选择支撑点,有足运动方式可以通过松软地面(如沼泽、沙漠等)以及跨越较大的障碍(如沟、坎和台阶等)。其次,有足运动可以主动隔振,即允许机身运动轨迹与足运动轨迹解耦。尽管地面高低不平,机身运动仍可以做到相当平稳。第三,有足运动在不平地面和松软地面上的运动速度较高,而能耗较少。
在研究有足动物时,观察与分析腿的结构与步态非常重要。如人的膝关节运动时,小腿相对大腿是向后弯曲的;而鸟类的腿部运动则与人类相反,小腿相对大腿是向前弯曲的;这是在长期进化过程中,为满足各自的运动要求逐渐进化形成这些独特结构。
图8-7所示为人类与鸟类的两足步行状态示意图。
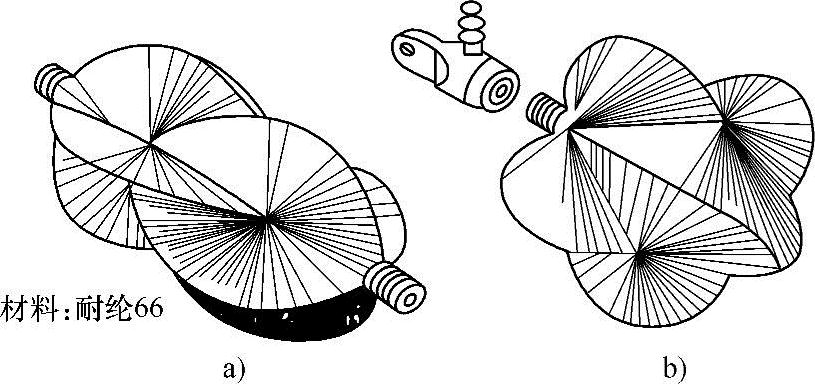
图8-6 ROMAC简图
a)伸长时的变形 b)收缩时的变形

图8-7 两足步行状态分析
a)人的步行状态 b)鸟类的步行状态
四足动物的前腿运动是小腿相对大腿向后弯曲,而后腿则是小腿相对大腿向前弯曲,图8-8为四足动物的腿部结构示意图。如马、牛、羊、犬类等许多动物都按此规律运动;四足动物在行走时一般三足着地,跑动时则三足着地、二足着地和单足着地交替进行,处于瞬态的平衡状态。
两足动物和四足动物的腿部结构大多采用简单的开链结构,多足动物的腿部结构可以采用开链结。图8-9a所示为多足动物的腿部的一种结构示意图,图8-9b所示为仿四足动物的机器人机构示意图。
拟人型步行机器人有足运动仿生可分为两足步行运动仿生和多足运动仿生,其中两足步行运动仿生具有更好的适应性,也最接近人类,故也称之为拟人型步行仿生机器人。
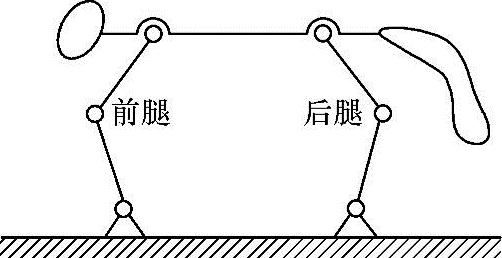
图8-8 四足动物的腿部结构示意图
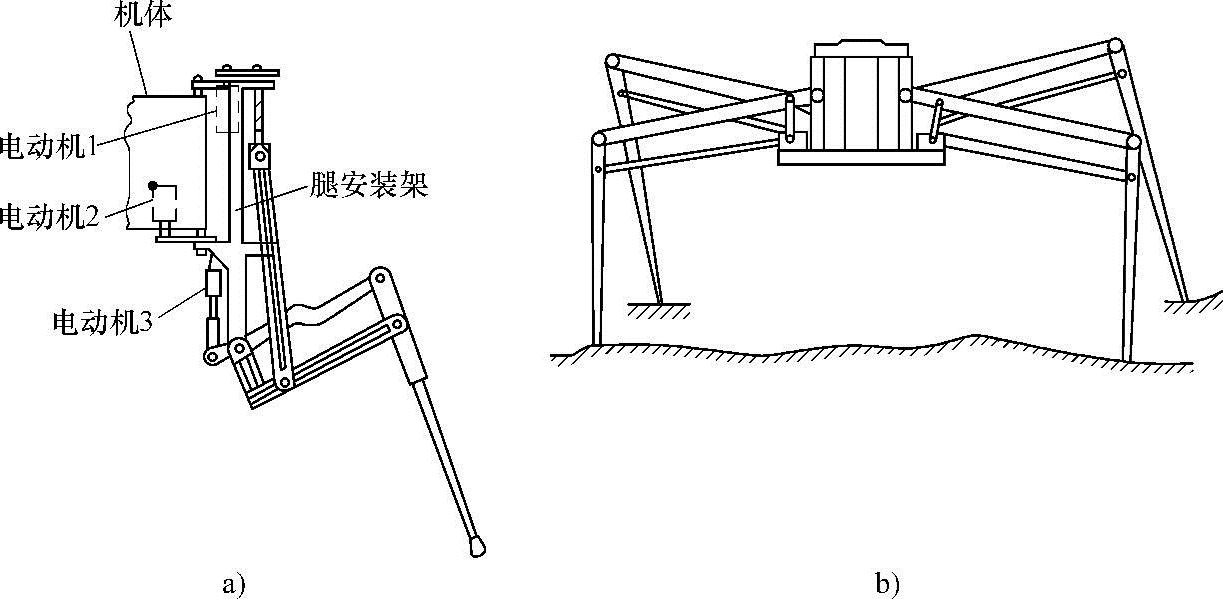
图8-9 多足动物的仿生腿结构
a)多足动物的仿生腿 b)仿四足动物的机器人机构
拟人型步行机器人具有类似于人类的基本外貌特征和步行运动功能,其灵活性高,可在一定环境中自主运动,并与人进行一定程度的交流,更适合协同人类的生活和工作,与其他方式的机器人相比,拟人型步行机器人在机器人研究中占有特殊地位。
(1)拟人型步行机器人的仿生机构 拟人型步行机器人是一种空间开链机构,实现拟人行走使得这个结构变得更加复杂,需要各个关节之间的配合和协调。所以各关节自由度分配上的选择就显得尤其重要。从仿生学的角度来看,关节转矩最小条件下的两足步行结构的自由度配置认为髋部和踝部各需要2个自由度,可以使机器人在不平的平面上站立,髋部再增加一个扭转自由度,可以改变行走的方向,踝关节处增加一个旋转自由度可以使脚板在不规则的表面着地,膝关节上的一个旋转自由度可以方便地上下台阶。所以从功能上考虑,一个比较完善的腿部自由度配置是每条腿上应该具备7个自由度。图8-10所示为腿部的7个自由度的分配情况。
从国内外研究的较为成熟的拟人型步行机器人来看,几乎所有的拟人型步行机器人腿部都选择了6个自由度的方式,其分配方式为髋部3个自由度,膝关节1个自由度,踝关节2个自由度,如图8-11所示。由于踝关节缺少了一个旋转自由度,当机器人行走中进行转弯时,只能依靠大腿与上身连接处的旋转来实现,需要先决定转过的角度,并且需要更多的步数来完成行走转弯这个动作。但是这样的设计可以降低踝关节的设计复杂程度,有利于踝关节的机构布置,从而减小机构的空间体积,减轻下肢的重量。这是拟人型步行机器人下肢在设计中的一个矛盾,它将影响机器人行走的灵活程度和腿部结构的繁简。
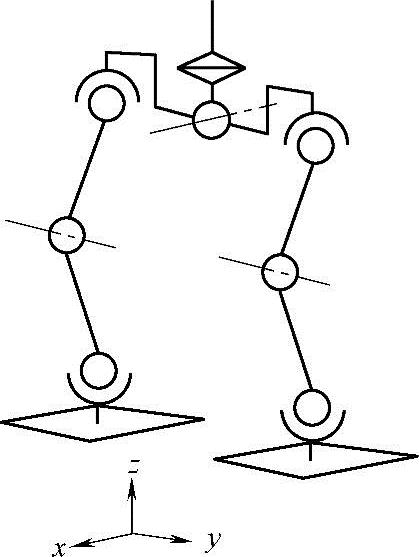
图8-10 拟人机器人腿部的理想自由度
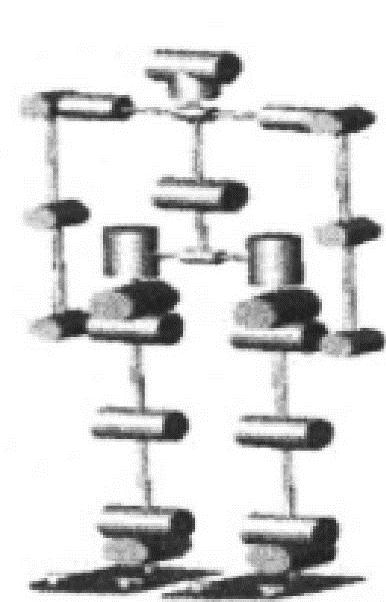
图8-11 拟人机器人腿部6个自由度
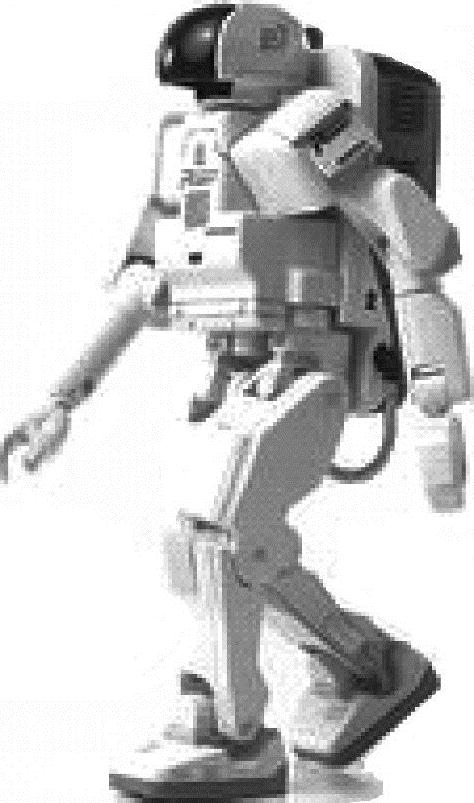
图8-12 步行机器人样机P3
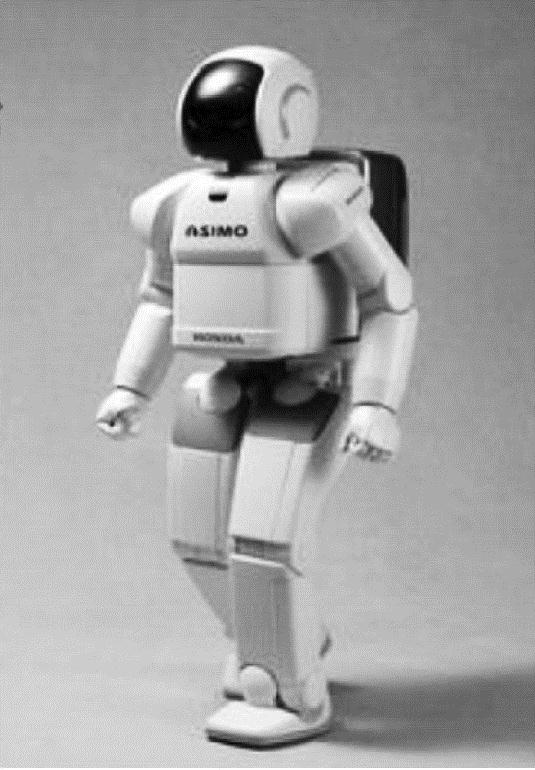
图8-13 步行机器人样机阿西莫
(2)拟人型仿生步行机器人实例 与其他足式机器人相比,拟人形步行机器人具有很高的灵活性,具有自身独特的优势,无疑更适合为人类的生活和工作服务,同时不需要对环境进行大规模的改造,与其他方式的机器人相比具有更为广阔的应用前景。
图8-12所示为本田技研工业公司于1997年研制的步行机器人样机P3,图8-13所示为2001年推出的样机阿西莫(Advanced Step Innovative Mobility,ASIMO),样机改型使其技术日臻完善。实现了小型轻量化,使其更容易适应人类的生活空间,同时通过提高双脚步行技术使其更接近于人类的步行方式。(https://www.xing528.com)
阿西莫高120cm,机器人的宽度和厚度也相应缩小从而更便于在人群中步行。通过降低身高不仅减轻了重量,同时通过重新设计骨骼结构以及采用锰骨架等大幅“减轻了重量”。它可以实时预测以后的动作,并且据此事先移动重心来改变步调。过去由于不能进行预测运动控制,当从直行改为转弯时,必须先停止直行动作后才可以转弯。ASIMO通过事先预测“下面转弯以后重心向外侧倾斜多少”等重心变化,可以使得从直行改为转弯时的步行动作变得连续流畅。此外,由于能够生成步行方式,因此可以改变步行速度以及脚的落地位置和转弯角度。另外,还可以轻易地模仿螃蟹的行走模式、原地转弯以及具有节奏感的上下楼梯动作。在进一步配备语音以及视觉识别功能和提高自律性时,可以成为在人类生活中发挥作用的机器人。
我国在仿人形机器人方面也做了大量研究工作,国防科技大学研制成功我国第一台仿人型机器人——“先行者”(见图8-14),实现了机器人技术的重大突破。“先行者”有人一样的身躯、头颅、眼睛、双臂和双足,有一定的语言功能,可以动态步行。图8-15所示为12关节空间运动型两足机器人爬楼梯的过程。
仿人形机器人是多门基础学科、多项高技术的集成,代表了机器人的尖端技术。因此,仿人形机器人是当代科技的研究热点之一。仿人形机器人不仅是一个国家高科技综合水平的重要标志,也在人类生产、生活中有着广泛的用途,不仅可以在有辐射、有粉尘、有毒等环境中代替人们作业,而且可以在康复医学上形成一种动力型假肢,协助截瘫病人实现行走的梦想。
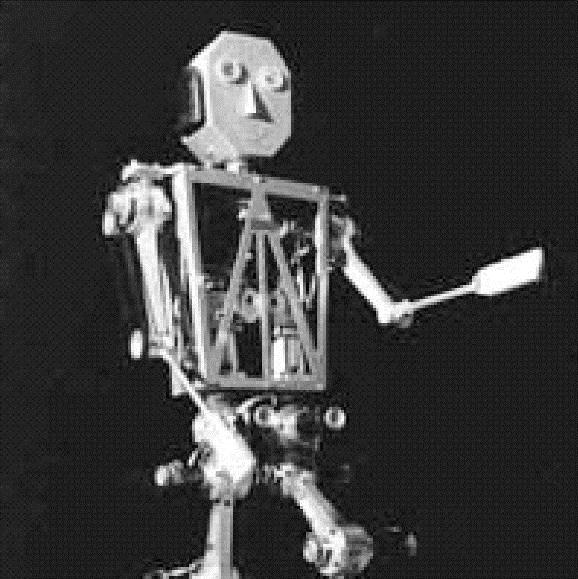
图8-14 “先行者”人形机器人
图8-15 12关节空间运动型两足机器人
(3)足+轮式机器人 2017年谷歌旗下波士顿动力公司最新发布一款名为Handle的机器人,如图8-16所示,外形看起来像赛格威(Segway)平衡车和两条腿的阿特拉斯(Atlas)机器人的结合。Handle是一次车轮和腿的结合实验,Handle的动态系统能够让它一直保持平衡,并且知道如何分配重量,保持重心稳定。
Handle把轮滑技术发挥到了极致,它的跳跃与缓冲让人惊叹,纵跃1.2m;它搬运东西可以下楼梯,穿越雪地放到指定位置。
整个机器人由电池供能,驱动电动机和液压泵。无需外接设备,一次充电续航24km。
2.多足步行仿生机器人
(1)多足仿生步行机器人的机构 多足仿生一般是指四足、六足、八足的仿生步行机器人机构,常用的是六足仿生步行机器人。四足步行机器人在行走时,一般要保证三足着地,且其重心必须在三足着地的三角形平面内部才能使机体稳定,故行走速度较慢。在对速度要求不高的场合,也有应用。如海底行走的钻井平台则采用了四足行走机构。多足步行仿生就是指模仿具有四足以上的动物运动情况的设计问题。多足仿生步行机器人机构设计是系统设计基础。在进行多足步行机器人机构设计之前,对生物原型的观察与测量是设计的基础环节和必要环节。如通过对昆虫的运动进行观察与分析实验,一方面了解昆虫躯体的组成、各部分的结构形式以及腿部关节的结构参数;另一方面研究昆虫站立、行走姿态,确定昆虫在不同地形的步态、位姿以及位姿不同时的受力状况。
通过对步行机器人足数与性能定型评价,同时也考虑到机械结构简单性和控制系统简单性,通过对蚂蚁、蟑螂等昆虫的观察分析,发现昆虫具有出色的行走能力和负载能力,因此六足步行机器人得到广泛应用,以保证高速稳定行走的能力和较大的负载能力。步行机器人腿的配置采用正向对称分布。四足仿生机器人如图8-17a所示,六足仿蟹步行机器人如图8-17b所示。

图8-16 Handle机器人
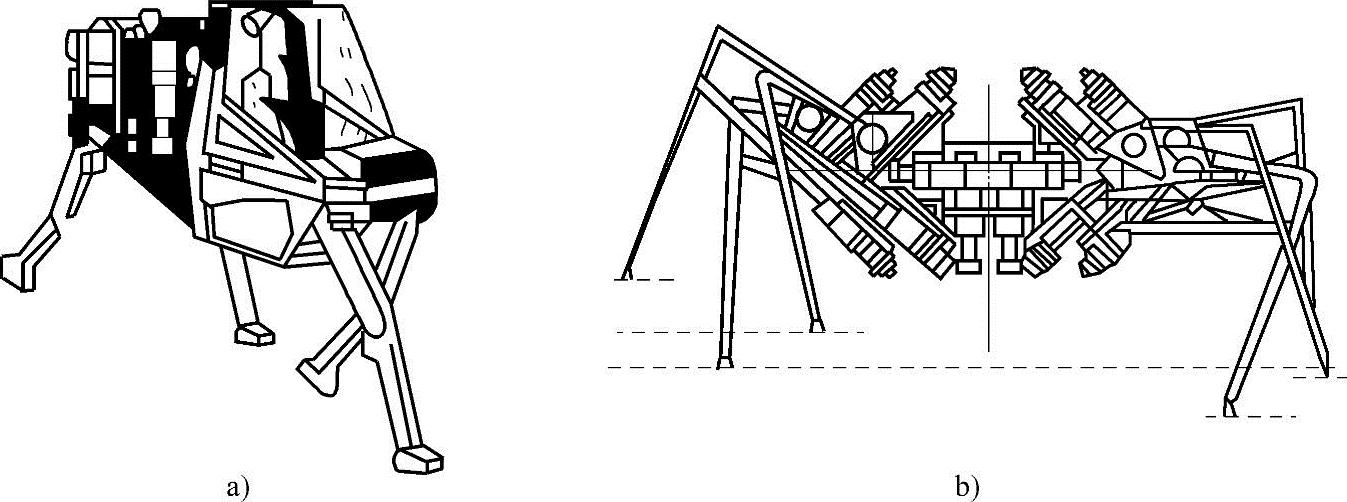
图8-17 多足步行机器人模型
a)四足仿生机器人 b)六足仿蟹步行机器人
六足步行机器人常见的步行方式是三角步态。三角步态中,六足机器人身体一侧的前足、后足与另一侧的中足共同组成支撑相或摆动相,处于同相三条腿的动作完全一致,即三条腿支撑,三条腿抬起换步。抬起的每个腿从躯体上看是开链结构,而同时着地的3条腿或6条腿与躯体构成并联多闭链多自由度机构。图8-18所示六足步行机器人中,在正常行走条件下,各支撑腿与地面接触存在摩擦不打滑,可以简化为点接触,相当于机构学上的3自由度球面副,再加上踝关节、膝关节及髋关节(各关节为单自由度,相当于转动副),每条腿都有6个单自由度运动副。

图8-18 六足步行机器人
六足步行机器人的行走方式,从机构学角度看就是3分支并联机构、6分支并联机构及串联开链机构之间不断变化的复合型机构。同时也说明,无论该步行机器人采取的步态及地面状况如何,躯体在一定范围内均可灵活地实现任意的位置和姿态。
(2)多足步行仿生机器人实例 自20世纪80年代麻省理工学院研制出第一批可以像动物跑和跳的机器人开始,各国都积极进行多足仿生步行机器人的研究,模仿对象有蜘蛛、蟋蟀、蟹、蟑螂、蚂蚁等。目前,多足仿生步行机器人已出现于多个领域,特别是在军事侦察领域得到广泛应用。
2000年,新西兰坎特伯雷大学研制出了六足步行机器人Hamlet,如图8-19所示。机器人每条腿有3个转动关节,每个关节使用10W直流伺服电动机,通过减速比为1∶246的行星轮减速器输出双向4.5N·m转矩,在第二和第三关节处,采用联轴器和锥齿轮使电动机与腿部轴线平行。每条腿足端都装有三维力传感器,通过传感器信号改变身体姿态。机器人总质量为12.7kg,站立时高度为400mm,能以0.2m/s的平均速度在复杂地形中自主行走,并具有越障能力。
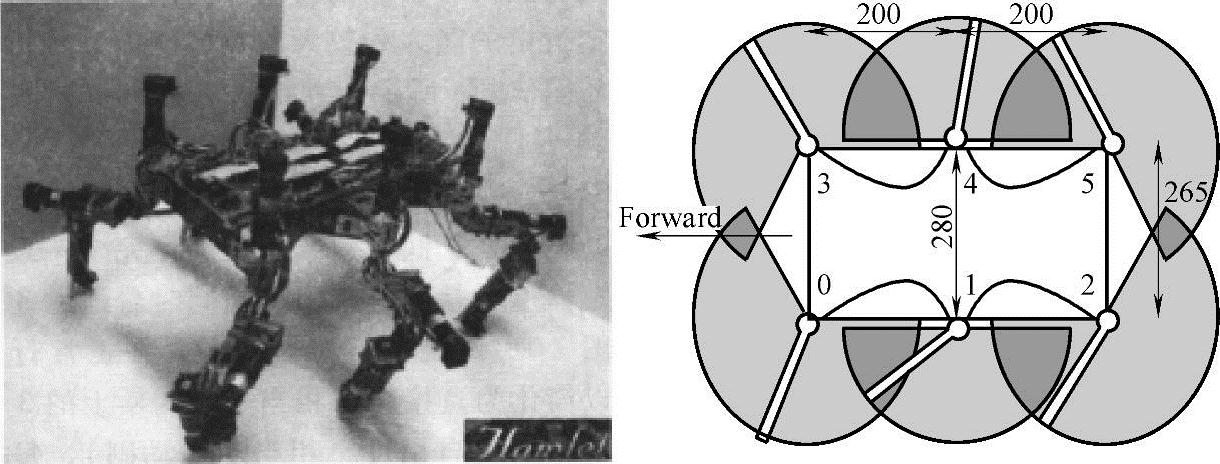
图8-19 新西兰六足步行机器人Hamlet
2001年,德国国家信息科技研究中心研制了八足步行机器人蝎子(Scorpion),如图8-20所示。此机器人可以完成全方位、平稳快速的行走,而且可以在行走时改变身体姿态和行走速度,已经成功地实现了沙地和多岩石不规则地面行走。
我国在步行机器人的研究与世界发达国家还存在一定差距,北京理工大学仿生机器人研究小组,在对各类昆虫进行观察实验的基础上,采用功能仿生和结构仿生的方式,研制出一种尺寸较小、机动灵活的六足仿生步行机器人。其仿生步行机器人整体外形尺寸为0.8m×0.6m×0.4m,六足仿生步行机器人巡航前进速度为0.2m/s,最高速度为0.3m/s,可攀爬坡度为45%的斜坡,持续作业时间为2h,仿生步行机器人自重10kg,可携带有效载荷3kg。它可实现仿生步行机器人在小扰动作业条件下的各种规定运动,如前进、转向、加速、攀登、越障、停止等。六足仿生步行机器人的装配图如图8-21所示。
多足步行机器人在设计过程中,除去腿结构的设计之外,步态相位的设计也很重要。也就是说,动物在运动过程中,哪条腿先迈动,其次是哪条腿,最后是哪条腿,要把腿的运动次序和步幅大小弄清楚,当然还要弄清楚其重心随腿运动的摆动情况,这样的观察对仿生设计是非常必要的。
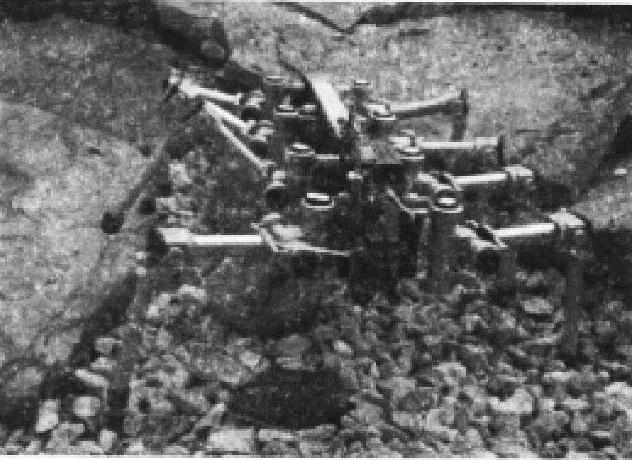
图8-20 仿生步行机器人蝎子
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。