



定步长的扰动观测法存在振荡和误判问题,使系统不能准确地跟踪到最大功率点,造成了能量损失,因此需要对上述定步长的扰动观测法进行改进。本节介绍了扰动观测法的几种改进方法,其中:基于变步长的扰动观测法在减小振荡的同时,使系统可以更快地跟踪最大功率点;基于功率预测的扰动观测法有效地解决了外部环境剧烈变化时所产生的MPPT误判问题;基于滞环比较的扰动观测法在克服最大功率点跟踪过程中的振荡和误判方面均有较好的性能。
6.3.3.1 基于变步长的扰动观测法
由对振荡问题的分析可知:定步长扰动观测法为了保证系统跟踪的快速性不能将步长设定太小,因此必然在MPP附近存在一定幅度的振荡,从而难以满足较高的MPPT精度的要求;为减小振荡幅度,减小电压扰动步长是一种行之有效的措施,然而减小电压扰动步长必然导致逼近MPP的搜索时间变长。显然,定步长扰动观测法必然存在MPPT精度与快速性之间的矛盾。为了调和这一矛盾,可以采用基于变步长的扰动观测法,其基本思想为:在远离MPP的区域内,采用较大的电压扰动步长以提高跟踪速度,减少光伏电池在低功率输出区的时间;在靠近MPP的区域内,采用较小的电压扰动步长以保证跟踪精度。以下介绍几种变步长扰动观测法。
1.最优梯度法[9]
梯度法是一种传统且被广泛用于求取函数极值的方法。它的基本思想是选取目标函数的正(负)梯度方向作为每步迭代的搜索方向,逐步逼近函数的最大(小)值。由于光伏电池的P-U特性曲线具有典型的单峰非线性特性,而最大功率跟踪法的目的是要在P-U特性曲线上求得曲线的最大值,由此可采用最优梯度法实现MPPT。具体应用时应选择正梯度方向,且逐步逼近函数的最大值。
最优梯度法的定义为:若一欧氏空间n维函数f(f∶En)为连续且可一阶微分,则∇f(X)存在且为一n维列向量,现定义一n维行向量为g(X)=∇f(X)T,为方便起见,定义正梯度gk为
gk=g(Xk)=∇f(Xk)T (6-9)
定义梯度法的迭代演算法为
Xk+1=Xk+akgk (6-10)
式中 ak——非负值常数。
搜寻函数的最大值点总是沿着gk的方向搜寻。根据光伏电池的电气特性,若忽略其等效模型中串联电阻的效应,可得输出电压U和输出功率P的关系为

显然,P为一以电压U作为惟一变量的非线性函数,并且是连续可一阶微分
函数。
此时由式(6-9)、式(6-11)得

由式(6-9)~式(6-12)不难得出,梯度法的迭代算法可写成
Uk+1=Uk+akgk (6-13)
可见,基于最优梯度法的MPPT控制实际上是按光伏电池P-U特性曲线的斜率而自动变化电压扰动的步长。考虑到P-U特性曲线端电压的有界性,因此,当把梯度法运用到光伏电池最大功率点的跟踪上,所搜寻到的最大功率点是全域的。
利用最优梯度法进行MPPT,保留了扰动观测法的各种优点,同时由一个动态变步长的扰动量可改变光伏电池输出功率曲线上电压的收敛速度,图6-11给出最优梯度法进行MPPT的搜索过程:当工作点位于最大功率点左侧斜率较大的区域时,电压以一较大步长的扰动量增加,并随着向MPP的靠近,自动变小扰动的步长,如图6-11a所示;反之当工作点位于最大功率点右侧斜率较大的区域时,电压以一较大步长的扰动量减少,并随着向MPP的靠近,亦自动变小扰动的步长,如图6-11b所示。显然,较大步长的扰动量确保了MPPT的快速性,而在大功率输出点附近搜索时,由于最优梯度法采用足够小的步长扰动,因而可明显抑制最大功率输出点附近的振荡。
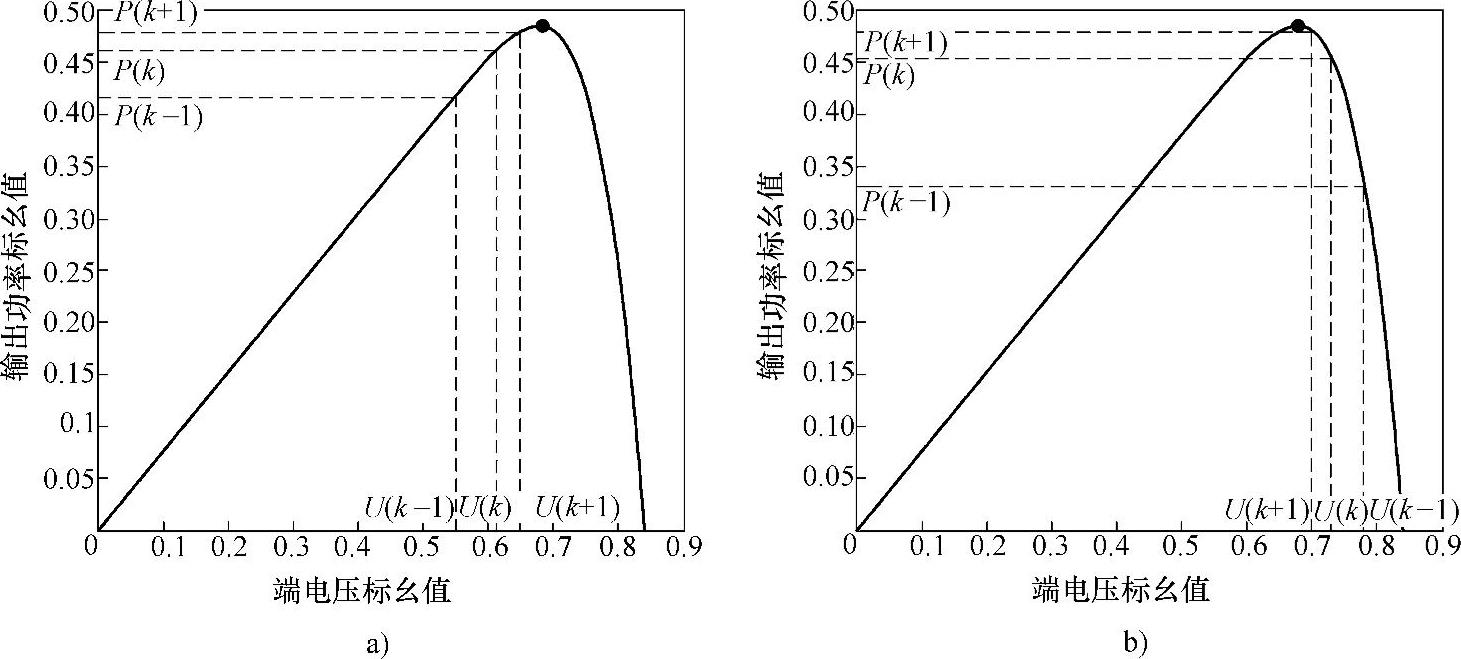
图6-11 最优梯度法进行MPPT的搜索过程
以上分析表明,最优梯度法是一种基于变步长的扰动观测法,步长大小与dP/dU的值成正比,即:在刚开始最大功率跟踪时,由于dP/dU变化很大,因而采用较大的步长以满足MPPT的快速性要求;而当接近最大功率点时,由于dP/dU变化很小,因而采用较小的步长以满足MPPT的稳定性要求。显然,最优梯度法较好地解决了定步长的扰动观测法中快速性与稳定性之间的矛盾。
2.逐步逼近法[10]
最优梯度法中扰动步长的计算涉及光伏电池的数学模型,而数学模型中的相关参数在实际中难以准确获得,为此提出了一种更为实用的基于变步长的扰动观测法,即逐步逼近法,其基本思路为:开始搜索时,首先选择较大的步长搜寻最大功率点所在的区域,然后在每一次改变搜索方向时按比例缩小步长,同时等比例地缩小搜索区域,进行下一轮搜索,这样搜索到的最大功率所在的区域将缩小一半,精度提高一倍,再如此循环下去,直至逼近最大功率点。逐步逼近法在搜索过程中不断调整搜索步长,每次调整都使得精度成倍提高,从而大大提高了精度。这也是一种变步长MPPT算法,其具体的变步长搜索过程简述如下:
假定初始工作点工作在P-U特性曲线最大功率点的左边,并且远离最大功率点,此时应以某一较大的步长m进行搜索,当Pi+1<Pi满足时,说明当前工作点工作在最大功率点的右端,此时便可以估计出最大功率点的范围应在两个初始步长2m范围内;接着应该改变搜索的方向,并且以m/2为步长进行搜索,直到出现搜索方向第二次改变时,届时最大功率点的范围应在一个初始步长m范围内,从而使跟踪精度提高一倍。此后再次改变搜索方向,并且以m/4为步长进行搜索,而搜索到的最大功率点的范围应在步长m/2范围内,使跟踪精度再次提高一倍。依此类推,直到搜索到给定的精度范围内时,就认为搜索到了最大功率点。显然,逐步逼近法的精度在搜索过程中是以指数形式提高的,从而也较好地解决了MPPT跟踪速度和精度间的矛盾。
6.3.3.2 基于功率预测的扰动观测法
上述变步长的扰动观测法虽然有效地解决了MPPT跟踪速度和精度间的矛盾,但是仍然无法克服扰动观测法的误判问题。由上述关于误判问题的分析可知,在辐照度变化较快的情形下,工作点序列并不是落在单一的特性曲线上,而是由不同特性曲线上的工作点组成,因此,在进行MPP搜索时若依据单一的特性曲线进行判别,就有可能发生误判。实际上,针对图6-10所示的误判问题,可以对多条特性曲线的情形进行预估计,以克服扰动观测法的误判,这就是基于功率预测的扰动观测法,其基本原理讨论如下:
定步长的扰动观测法是基于静态的P-U特性曲线进行MPP搜索的,而实际上,辐照度是时刻变化的,即P-U特性曲线一直处于动态的变化过程中。如果能在同一时刻测得同一辐照度下P-U特性曲线上电压扰动前、后所对应的两个工作点功率,并进行扰动观察法判定,那么就不会存在误判现象,显然这是不可能实现的。实际上,同一辐照度下P-U特性曲线上电压扰动前的工作点功率,可以通过预测算法而获得,利用这一预测的功率以及同一辐照度下P-U特性曲线上电压扰动后检测的工作点功率就可以实现基于扰动观测法的MPPT,并可以有效地克服误判,这就是基于功率预测的扰动观测法的基本思路。显然功率预测法的关键在于功率预测,下面分析功率预测的基本算法。
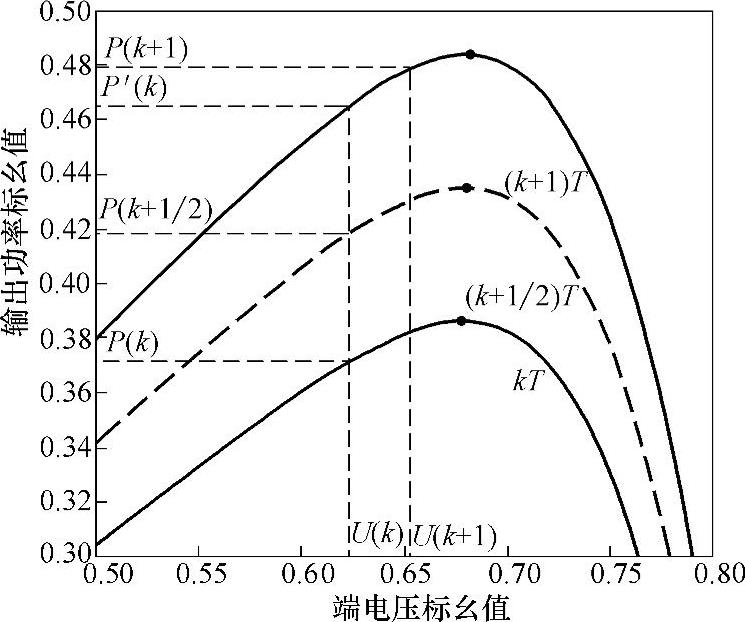
图6-12 功率预测示意图
如图6-12所示,当采样频率足够高时,可以假定一个采样周期中辐照度的变化速率恒定。令kT时刻电压Uk处工作点测得的功率为P(k),此时并不对参考电压加扰动,而在kT时刻后的半个采样周期的(k+1/2)T时刻增加一次功率采样,若令测得的功率为P(k+1/2),则可得到基于一个采样周期的预测功率P′(k)为(https://www.xing528.com)
P′(k)=2P(k+1/2)-P(k) (6-14)
然后,在(k+1/2)T时刻使参考电压增加ΔU,并令在(k+1)T时刻测得电压Uk+1处的功率为P(k+1),由于(k+1)T时刻的检测功率P(k+1)以及kT时刻的预测功率P′(k)理论上是同一辐照度下P-U特性曲线上电压扰动前后的两个工作点功率,因此,利用(k+1)T时刻的检测功率P(k+1)以及kT时刻的预测功率P′(k)进行基于扰动观测法的MPPT是不存在误判问题的。
值得一提的是,若将基于功率预测的扰动观测法与变步长的扰动观测法有机结合则不仅能克服误判,而且还能解决MPPT跟踪速度和精度间的矛盾,最大限度地抑制稳定辐照度下的振荡问题。
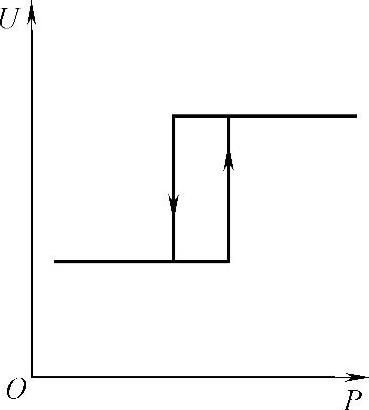
图6-13 滞环技术示意图
6.3.3.3 基于滞环比较的扰动观测法[11]
定步长的扰动观测法是一种自寻优搜索控制方法,一般存在最大功率点附近的振荡和误判问题,而误判过程实际上是一种外部环境动态变化时产生的振荡。从控制的角度而言,抑制振荡可以采用具有非线性特性的滞环控制策略,针对光伏电池的P-U特性,其滞环控制环节如图6-13所示。
由图6-13可知,当功率在所设的滞环内出现波动时,光伏电池的工作点电压保持不变,只有当功率的波动量超出所设的滞环时,才按照一定规律改变工作点电压。可见,滞环的引入,可以有效地抑制扰动观测法的振荡现象。实际上可以将误判看成为外部环境发生变化时的一种动态的振荡过程,因此该方法也可以克服扰动观测法的误判现象。
定步长的扰动观测法只是通过比较扰动前、后两点的功率差来决定是增大还是减少工作点电压,虽然使用过程中造成振荡或误判的原因不同,但每次的扰动都是基于前后两点瞬时测量值的单向扰动,如果再增加另外一点的测量信息并进行具有滞环特性的双向扰动,则有可能克服扰动观测法的振荡或误判问题,具体讨论如下:
在扰动观测法的MPPT过程中,已知A点(当前工作点)和B点(按照上一步判断给出的方向将要测量的点),而对于增加的另一C点的确定,则应选择B点反方向两个步长所对应的工作点,如图6-14所示。

图6-14 C点的位置示意图
假定当前工作点A点并未发生误判。因此应当以当前工作点A点为中心,左右各取一点形成滞环,如图6-14中实线所示。在基于滞环的扰动观测法MPPT过程中,若以当前工作点A点为出发点,依据判定的扰动方向扰动至B点,之后再反向两个步长扰动至C点,如果C、A、B的功率测量值依次为PC、PB、PA,则通过功率值的比较,可得出如图6-15所示的9种可能情形。图中定义:PA>PC时记为“+”,PB≥PA时记为“+”,反之均记为“-”。

图6-15 三点之间功率比较可能出现的关系示意图
通过三点之间功率的比较判断,可以得出基于滞环的电压扰动规则如下:
规则1,如果两次扰动的功率比较均为“+”,则电压值保持原方向扰动;
规则2,如果两次扰动的功率比较均为“-”,则电压值反方向扰动;
规则3,如果两次扰动的功率比较有“+”有“-”,可能已经达到最大功率点或者外部辐照度变化很快,则电压值不变。
由判定规则不难看出:滞环比较法实际上是通过双向扰动确认的方法来保证扰动观测法的动作可靠性以避免误判的发生,同时也有效地抑制了最大功率点附近的振荡。
下面具体分析滞环比较法抑制振荡和误判的原理过程。
以图6-16中给出的Ⅰ、Ⅱ、Ⅲ三种情形为例进行分析。由图6-16可知,假设对于Ⅰ、Ⅱ、Ⅲ三种情形,均满足PB>PA。当采用定步长的扰动观测法时,系统会判定继续增加电压值。但是由图6-16可知,仅有Ⅰ情形,继续增大工作点电压是正确的。而对于Ⅱ、Ⅲ情形,继续增大工作点电压则会使工作点朝远离最大功率点方向移动。当采用滞环比较法时,对于Ⅰ情形,依据规则判定“电压值保持原方向扰动”,而对于Ⅱ、Ⅲ情形,系统判定“达到最大功率点或者外部辐照度变化很快”,因此电压保持不变。从而避免了误判,减小了损耗。
对于扰动观测法的振荡问题,当在最大功率点附近扰动时,依据上述规则3,由于电压保持不变,因此避免了在最大功率点附近的振荡。
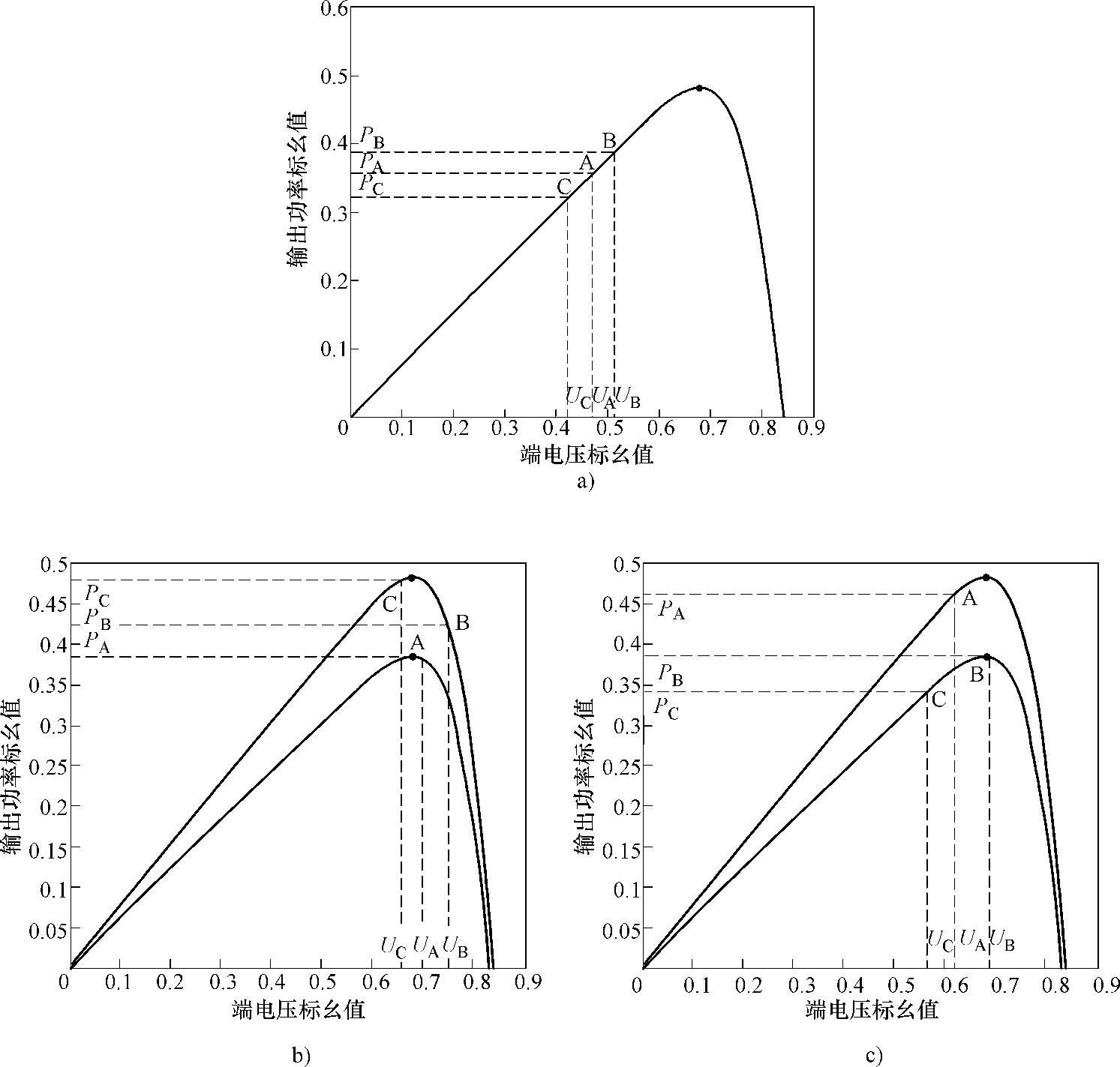
图6-16 不同情形对实际功率点扰动与判断的影响
a)Ⅰ情形 b)Ⅱ情形 c)Ⅲ情形
滞环比较法的具体流程图如图6-17所示。
虽然滞环比较法可以较大程度地避免振荡和误判现象,但如果步长过大,工作点可能会停在离最大功率点较远的区域,如果步长过小,在新一轮搜索开始时,工作点会在远离最大功率点区域内长时间地搜索,因此速度和精度的矛盾仍然存在。为此,可以采用变步长的滞环比较法来解决这一矛盾,具体的变步长方法可以参考前面的相关内容。
与定步长的扰动观测法相比,变步长的滞环比较法能够有效克服振荡和误判现象,同时兼顾到速度和精度的要求,能够更加准确地跟踪光伏电池的最大功率点,从而提高了光伏系统的发电效率。
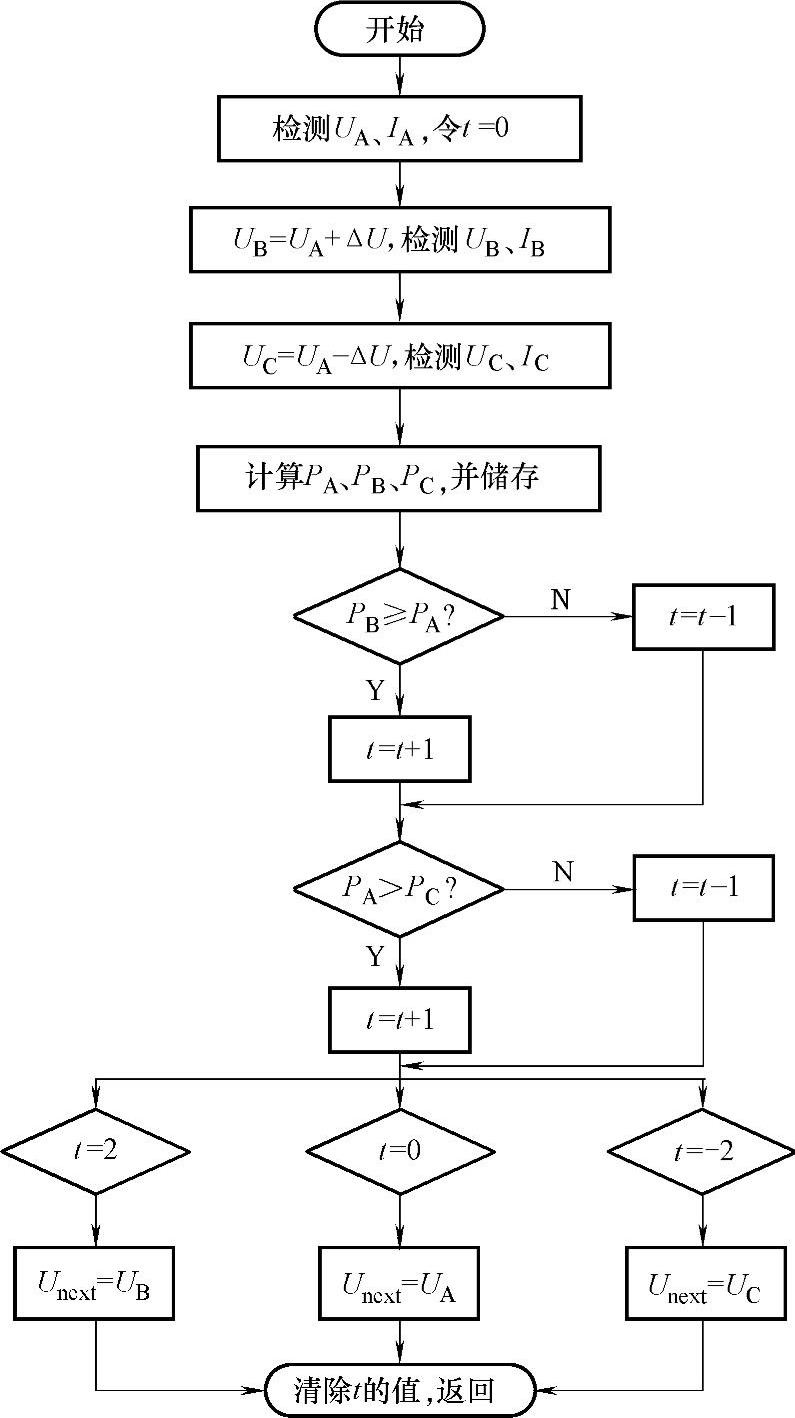
图6-17 滞环比较法流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。