



土压平衡式盾构掘进机的掘进原理是在推力的作用下,刀盘切削土体,通过调节螺旋机的转速、控制土室的排土量,达到土室与开挖面的土压力动态平衡。它是目前国际、国内隧道施工的主力机型,其工作原理如图5-3所示。
当盾构机在不稳定的地层中掘进时,可以通过制造支撑压力来防止隧道掌子面失稳情况的发生。使用土压平衡盾构机开挖,切削刀盘1开挖下来的粘性土体用来支撑掌子面,而不像通过其他开挖方式的盾构机,其掌子面依靠另外的介质支撑。刀盘旋转的盾体区域称为开挖室2,它通过承压隔板3与常压下的盾体区域分开。刀盘旋转,带动刀具挖掘土壤。挖掘下来的土壤通过刀盘开口进入开挖室,与开挖室内已有的粘性土浆混合。推进液压缸4的推力通过压力挡板传给开挖室内土体,从而保证开挖面的稳定。当开挖室内的土体不再受外部土压力和水压力压紧时,就达到了土压平衡。
开挖仓内的渣土通过螺旋输送机5输送出去。渣土输送量由螺旋速度和上部螺旋输送机驱动器的开口十宇架控制。螺旋输送机把渣土输送到第一段输送带上,再转运到反转带上。当输送带反方向输送时,渣土被倾倒进入运输渣车中。隧道通常使用预应力钢筋混凝土管片7进行衬砌。管片在常压下通过管片拼装机6安装在盾体区域的压力室壁后面,然后用螺栓临时固定。砂浆经由盾尾上的注浆口或直接通过管片上的开口连续注入管片外面和围岩之间的空隙。
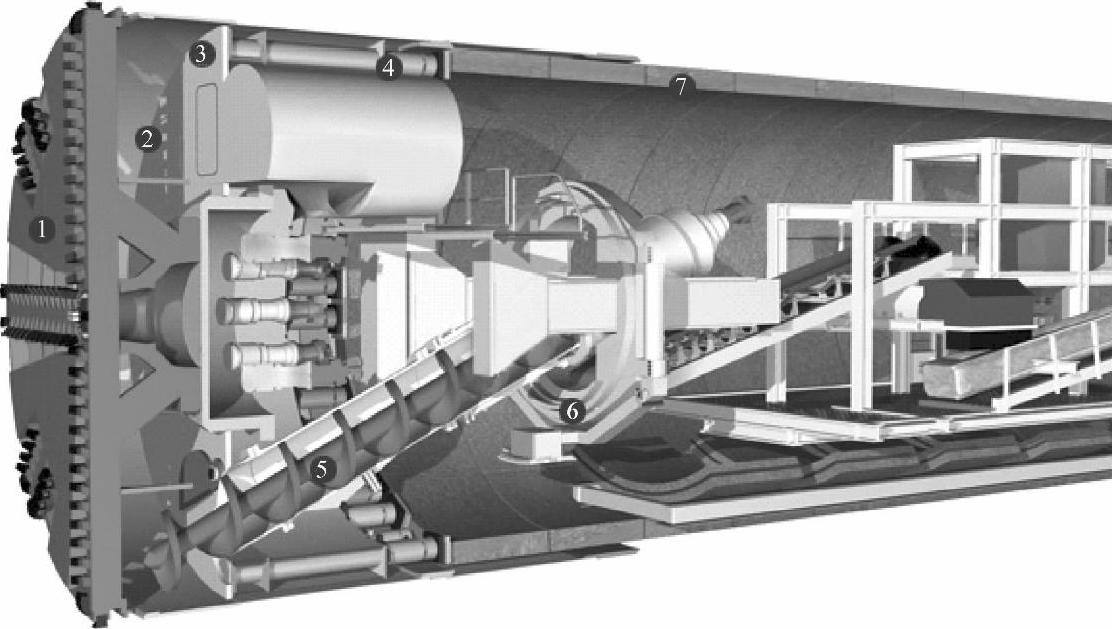
图5-3 土压平衡式盾构机的工作原理
1—切削刀盘 2—开挖室 3—承压隔板 4—液压缸 5—螺旋输送机 6—管片拼装机 7—管片
1.盾构测控系统
(1)盾构控制系统 图5-4为某盾构控制系统,其主要由PLC可控制编程控制器和显示操作终端机组成。PLC采用主从结构,有1个主站和2个从站,另有一套注浆PLC。PLC主站设在控制台,主CPU带3个显示操作终端机,编号为GC1、GC2、GC7。其中GC1、GC2分别操作盾构设备,互为备用,GC7操作加泥设备。1#从站设在盾构内,带3个显示操作终端机,编号为GC3~GC5。其中GC3、GC4操作盾构千斤顶,GC5远程操作注浆。2#从站设在2#车架上,带1个显示操作终端机(即触摸屏),编号为GC6,操作注浆设备。

图5-4 盾构控制系统图
主站同1#、2#从站通过两个并行的电缆环路连接(双环网)。系统采用了高速可靠的数据通信,即MELSECNET/Ⅱ数据通信系统。它采用2个并行的电缆环路连接各PLC站,其中一个称为正向环路(或主环路),另一个称为反向环路(或副环路)。当主环路内发生电缆断裂时,通信自动切换到副环路,继续保持数据通信;如果2个环路均断裂或者均脱接,除断裂的PLC,连接的站之间仍继续保持通信。
注浆PLC独立于PLC系统外,通过I/O口同PLC主站进行信号的交换。PLC配置了开关量输入/输出组件、模拟量输入/输出组件、通信接口组件和计算机通信组件。
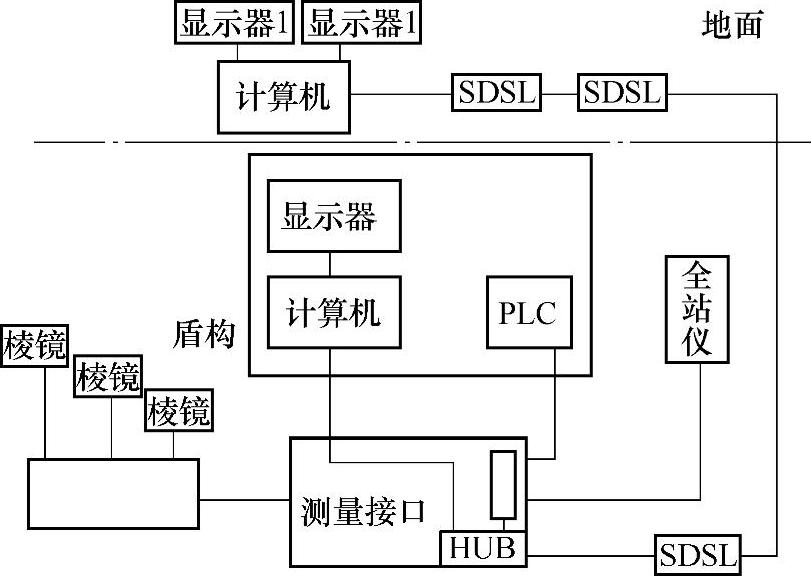
(2)姿态测控系统 盾构机姿态是指盾构机前端刀盘中心三维坐标和盾构机筒体中心轴线在三个相互垂直平面内的转角等参数。盾构的姿态测控系统由盾构和地面两部分组成。盾构部分主要由全站仪、棱镜、测量接口、控制单元、计算机(显示器)等设备组成。地面部分主要由计算机(显示器)和集线器等设备组成。盾构与地面部分通过一对兆比特调制解调器(SDSL)进行信号的联接,如图5-5所示。该系统通过高精度的测量仪器和专用软件来实现盾构姿态的自动测量,可以取得的实时数据信息有:
1)后视点、站的坐标和登录名称。
2)测量目标的数据。
3)测量时的盾构俯角和转角。
4)盾构前、中、后的坐标值,方位偏差等计算结果。
 (https://www.xing528.com)
(https://www.xing528.com)
图5-5 姿态测控系统
在盾构内,全站仪测量得到的姿态信号和PLC获取的盾构施工信号在测量接口单元中集成在一起,在盾构计算机显示器上显示,并送地面计算机。
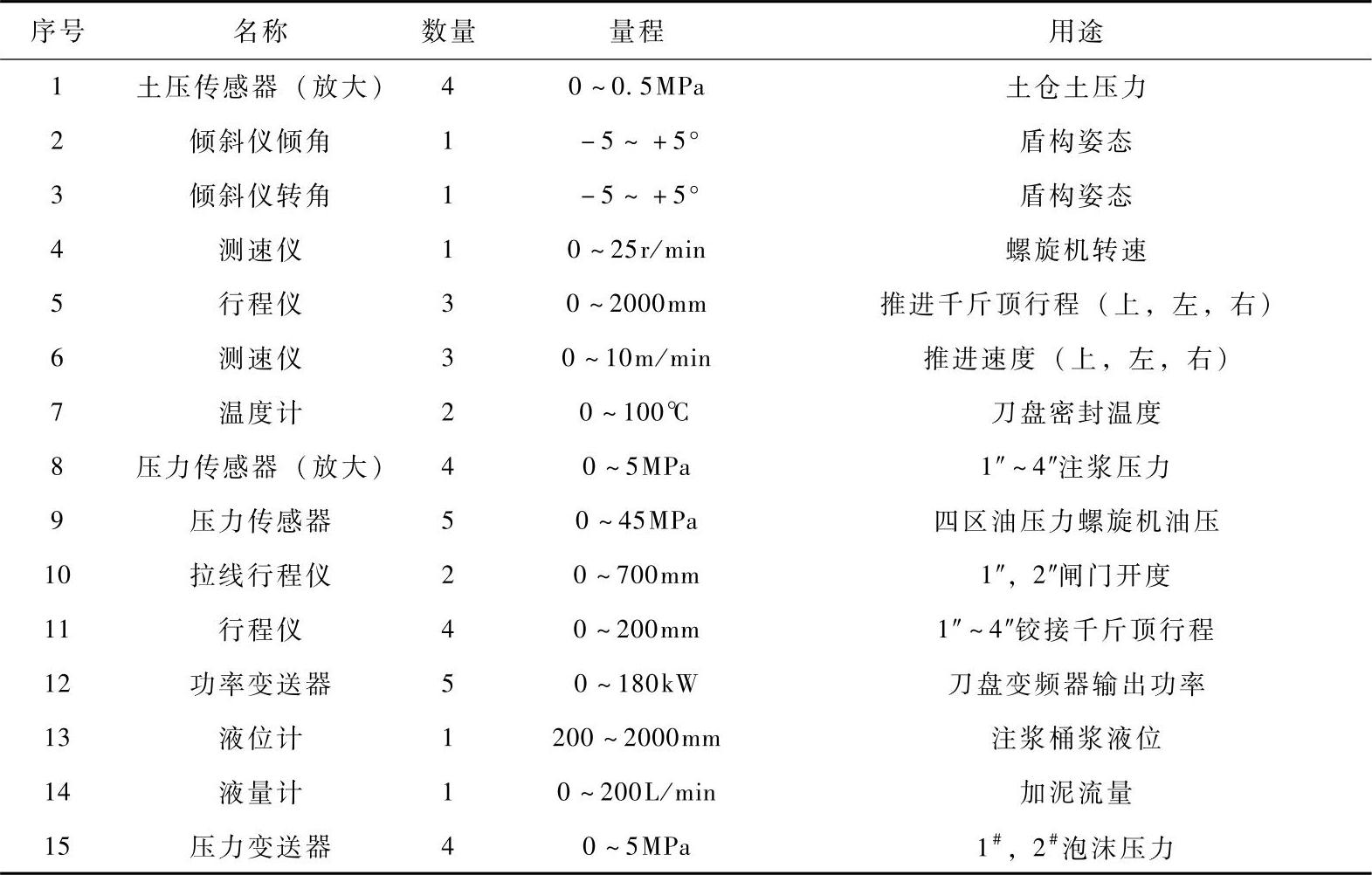
(3)检测系统 根据盾构测控系统的需求,配置了基本的检测仪器,检测的模拟量信号有土仓土压力,推进千斤顶油压、行程、速度,四区油压,螺旋机油压、转速,铰接千斤顶行程,刀盘变频器输出功率,刀盘密封温度,螺旋机闸门开度,注浆压力,注浆桶浆液位,泡沫压力,加泥压力,加泥流量,盾构的坡度和转角等。配置的传感器(变送器)共有40多套,见表5-1。
表5-1 传感器一览表
另外,对开关量信号的检测,配置了60余个限位继电器和10多个压力继电器。主要检测拼装机回转左/右限位状态,拼装机电缆盘左/右限位状态,螺旋机的伸/缩状态,螺旋机闸门的开/关状态,气阀、加泥阀、注浆阀、盾尾密封阀的开/闭状态,集中润滑的油脂油位,盾尾油脂油位等,以及集中润滑油脂泵和管道的压力高/低,盾尾密封油压高低,稀油润滑堵塞等信号。
2.盾构机激光导向系统
激光导向系统是综合运用测绘技术、激光传感技术、计算机技术及机械电子等技术指导盾构隧道施工的有机体系。系统由激光全站仪、信号传输和供电装置、激光接收靶、棱镜和定向点、盾构机主控室和液压缸杆伸长量测量装置等组成。盾构机主控室由程控计算机(预装隧道掘进软件,具有显示和操作面板)、控制盒、网络传输MO-DEM和可编程逻辑控制器(PLC)四部分组成,其中,隧道掘进软件是盾构机激光导向系统的核心。
地铁盾构法施工过程如图5-6所示。在隧道掘进模式下,激光导向系统是实时动态监测和调整盾构机的掘进状态,保持盾构机沿设计隧道轴线前进的工具之一。在整个盾构施工过程中,激光导向系统起着极其重要的作用。
1)在显示面板上动态显示盾构机轴线相对于隧道设计轴线的准确位置,报告掘进状态;并在一定模式下,自动调整或指导操作者人工调整盾构机掘进的姿态,使盾构机沿隧道设计轴线附近掘进。
2)获取掘进姿态及最前端已装环片状态,指导环片安装。
3)通过标准的隧道设计几何元素自动计算隧道的理论轴线坐标。
4)和地面计算机相连,对盾构机的掘进姿态进行远程实时监控。
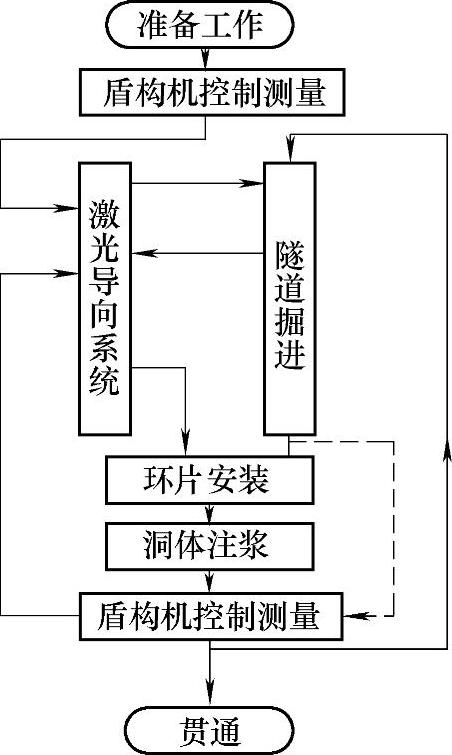
图5-6 盾构施工基本过程
从图5-6的盾构施工基本过程图可以看出,激光导向系统不能够独立完成导向任务,在盾构机始发、该系统启用之前,还需要做一些辅助工作。首先,激光全站仪首次设站点及其定向点坐标,需用人工测定。其次,必须使用人工测量的方法,对盾构机姿态初值进行精确测定,以便对激光导向系统中有关初始参数(如激光标靶上棱镜的坐标,内部的光栅初始位置及两竖角测量仪初值等)进行配置。
盾构机姿态除了可以通过人工测量、单独解算方式获得外,还可以由导向系统实时、自动地获取。用人工测量方式获得盾构机姿态的过程,被称作“盾构机控制测量”。盾构机控制测量的另一个作用是在盾构机掘进过程的间隙,对激光导向系统采集的盾构机姿态参数进行检核,对激光导向系统中有关配置参数进行校正。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。