



以上介绍的以高斯消去法为基础的直接解法是最常用的方法。对于一个n×n矩阵,高斯消去法的运算量大约为2n3/3。对于节点数很大的有限元模型(现在,上百万节点的汽车车身模型已很平常),高斯消去法的计算量将很可观,有些情况下,即使用最强大的计算机也可能满足不了对计算时间的要求。在这种情况下,迭代算法为解大规模线性代数方程组提供了另一种选择(在计算流体力学领域,主要是运用迭代法求解)。
1.迭代解法的概念
首先,以下列三元一次方程组为例,来对迭代解法的概念加以说明。

该方程组的真解为x1=-1,x2=1,x3=1。把方程组(5.6)变形为

迭代解法就是根据方程组(5.7)构建下列递推运算关系(i=0,1,2,3,…)

例如取初始估计值为x1(0)=0、x2(0)=0、x3(0)=0,则经过10次迭代即可逼近真实解(见表5.1)。
在以上所示的方法中,方程组(5.8)等号右边并没有及时地引入最新的计算结果。例如第1个方程已经计算出了x1(i+1),而在第2、3个方程中仍然使用前面一步的值x1(i)。如果把最新的计算结果也引入到迭代运算中,则可以得到下列关系

取同样的初始估计值x1(0)=0、x2(0)=0、x3(0)=0,只需5次迭代,即可逼近真实解(见表5.2),即计算速度提高了1倍。可见,方程组(5.9)是对方程组(5.8)的一个改进。
表5.1 根据方程组(5.8)所进行的迭代运算
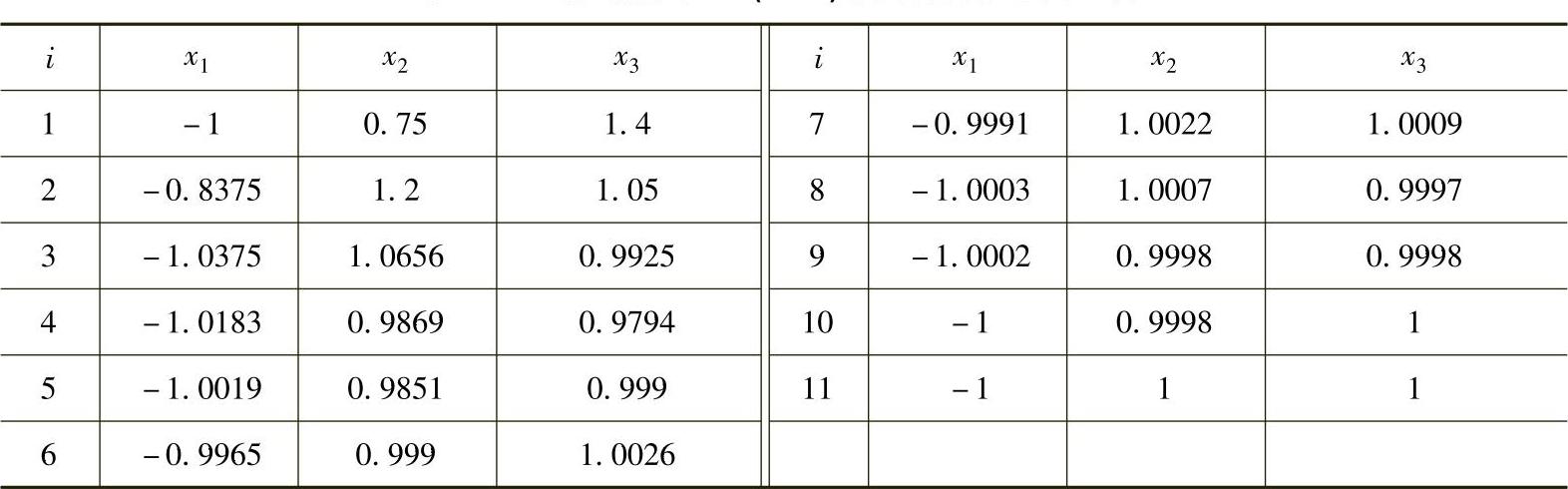
表5.2 根据方程组(5.9)所进行的迭代运算

对于这个简单的例子,应用迭代算法并不见得比直接解法(高斯消去法、FBS法)求解速度快。当系统规模越来越大时,迭代算法的优点就会显露出来。特别是当系数矩阵中含有大量0元素(稀疏矩阵)时,迭代算法的占用内存少,计算速度快的优点会很突出。
2.Jacobi法和Gauss-Seidel法
上面所介绍的迭代运算过程实际上代表了两种重要的古典迭代方法。方程组(5.8)所代表的方法称为Jacobi法,方程组(5.9)所代表的方法称为Gauss-Seidel法。
把方程组的系数矩阵[A]分为对角项[D]、对角线以下的项[L]以及对角线以上的项[U]之和(注意:这不同于前节介绍的LU分解)
[A]=[D]+[L]+[U]
具体到上面的例子,有

则Jacobi法可以表示为

Gauss-Seidel法可以表示为

应该指出的是,对于所有的线性代数方程,上述迭代算法并不能保证都收敛。例如对于式(5.1a)、式(5.1b)和式(5.1c)所示的方程,不管是用Jacobi迭代法还是用Gauss-Seidel迭代法,都将发散。迭代算法收敛的充分条件是系数矩阵[A]的对角项的绝对值大于所在行上其余项的绝对值之和,即 。但是,这个充分条件并不是十分严密,可能会有Jacobi法收敛而Gauss-Seidel法不收敛的情况。有时,即使不满足这个条件,但对角项的绝对值为最大,也可能收敛。对于收敛条件的详细表述,这里就不做介绍。
。但是,这个充分条件并不是十分严密,可能会有Jacobi法收敛而Gauss-Seidel法不收敛的情况。有时,即使不满足这个条件,但对角项的绝对值为最大,也可能收敛。对于收敛条件的详细表述,这里就不做介绍。
3.最速下降法(Steepest Descent Method)
适用范围更宽的迭代算法是基于最小值探索的方法,即由线性方程构建一个2次型函数,通过探索其最小值而求得方程的解。
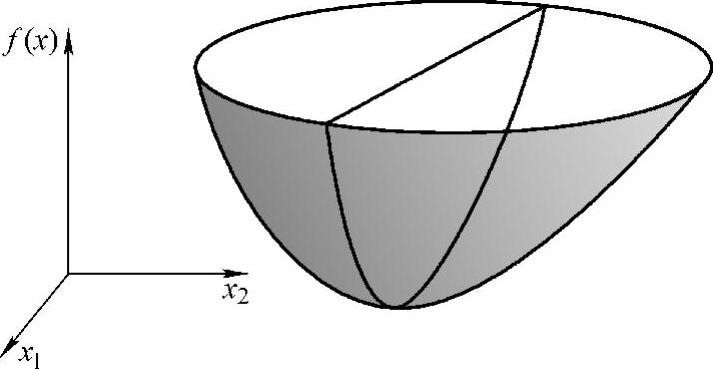
图5.12 次型函数f(x)的形状的示意图
对于方程[A]{x}={b},定义下列2次型函数

f(x)的结果为一个数,而不是向量。定义上述2次型函数的梯度为
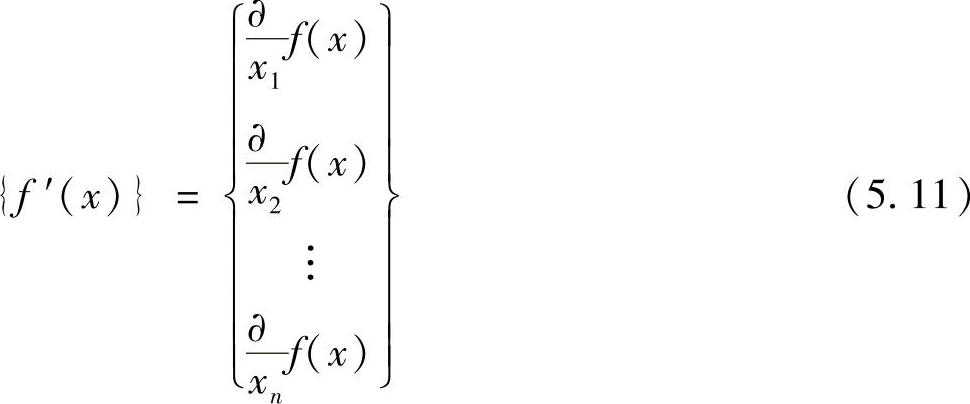
这是一个向量,其方向取为f(x)的最大增加方向。将式(5.10)代入式(5.11)进行整理,可得

当[A]为对称矩阵时,上式成为
{f′(x)}=[A]{x}-{b}
如果令梯度为0,则得[A]{x}={b}。可见,2次型函数f(x)的极点(梯度为0的点)就是线性方程组的解。因此,求解方程[A]{x}={b}的问题就演变成了探索2次型函数f(x)的极点的问题。对于线性动力学系统,矩阵[A]为正定矩阵,可以证明与其对应的2次型函数f(x)的形状为“碗形”,其极点处于碗底(参见图5.1),因此,从给定初始位置出发,下降到碗底的过程就是方程求解的过程。
最直接了当的方法就是从最陡的方向下降,这就是所谓的最速下降法(Steepest Descent Method),或称梯度下降法(Gradient Descent Method)。最陡的方向即是{f′(x)}的反方向,-{f′(x)}={b}-[A]{x}。
假设我们从{x(0)}出发,经过若干步{x(1)},{x(2)},…,{x(i)}下降到碗底,逼近方程的解{x}。定义误差为{g(i)}={x(i)}-{x},残差为{r(i)}={b}- {x(i)}。可见,残差的方向就是最陡下降方向,即{r(i)}=-{f′(x)}。因而,我们可以在此方向上定义以下递推关系
{x(i)}。可见,残差的方向就是最陡下降方向,即{r(i)}=-{f′(x)}。因而,我们可以在此方向上定义以下递推关系

现在的问题是如何确定式(5.12)中的系数α(i)。我们的目标是探索2次型函数f(x)的最小值,因此,α(i)应该使得在式(5.12)所示的探索方向上f(x)为最小。这种在一个方向上探索f(x)极值的方法称为线搜索(Line Search)。应用微分法则

上式为0时,f(x)为最小。可见,应该选择α(i)使得{r(i+1)}与{r(i)}正交,即(https://www.xing528.com)
{r(i+1)}T{r(i)}=0
由于

代入上式后整理,可得
将以上结果整理,用最速下降法进行迭代运算的过程可以表示为
该方法的特点就是每次探索的方向总是沿着残差的方向,而且当前的探索方向总与上一个探索方向直交(但应注意:并没有说当前的探索方向与以前的所有探索方向正交)。事实上,最速下降法往往会“重蹈覆辙”,在同一个方向上探索多次。这些特点可以从图5.2的实例中看出。该图是对一个二元一次方程组应用最速下降法的例子。
从初始值(x1=-2,x2=-2)开始,经过6步探索过程,逼近真值(x1=2,x2=-2)。
4.共轭梯度法(Conjugate Gradient Method)
在商业有限元软件中,共轭梯度法是常被采用的迭代方法。这里的共轭并不是复数共轭的概念,而是指两个长度为n的非零向量{u}、{v}具有以下关系
{u}T[A]{v}=0也称{u}、{v}相对于(n×n)的矩阵[A]正交。可以证明,如果可以找到n个互为共轭的向量{d(i)}(i=0,1,…,n-1),则方程[A]{x}={b}的解可以表示为这n个互为共轭的向量的线性组合:

写成迭代运算的形式,就是

可见,在不考虑数值舍入误差的理想情况下,只需要进行n次迭代运算,即可得到方程的解。这就是共轭梯度法的基本原理。
例如对一个二元一次方程组,只需两步迭代即可得到结果;而最速下降法则需要两次以上的迭代运算(在同一个方向上可能进行多次,参见图5.2)。也就是说,共轭梯度法的收敛性要比最速下降法的好,这正是该方法为商业有限元软件所青睐的原因。事实上,对于大规模系统,并不需要找到所有n个互为共轭的向量,也可以逼近方程的解。
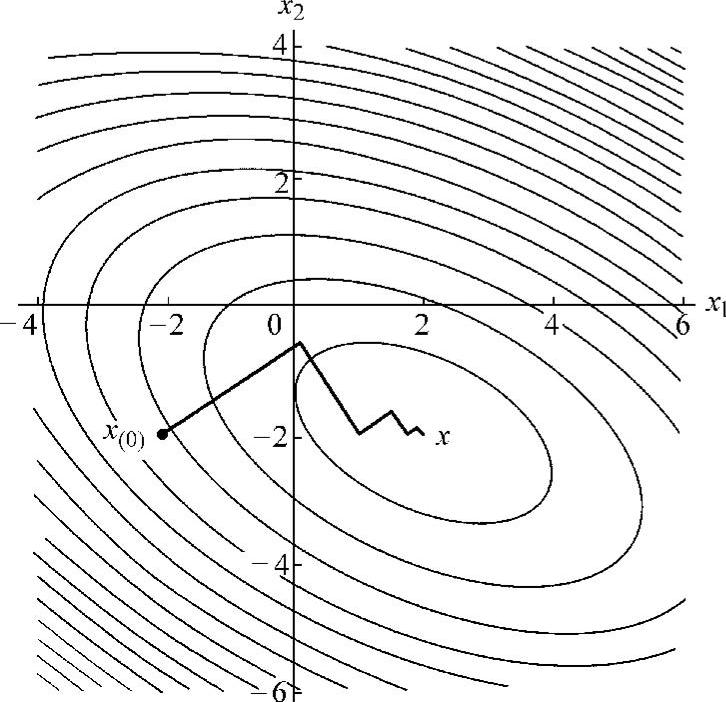
图5.2 最速下降法的例子
现在来探讨共轭探索方向{d(i)}的特点。与最速下降法一样,α(i)应该使得在式(5.14)所示的探索线路上的2次型函数f(x)为最小。应用微分法则

上式为0时,f(x)为最小。可见,应该选择α(i)使得{r(i+1)}与{d(i)}正交,即

由于 ,式(5.15)可进一步写成
,式(5.15)可进一步写成

即第(i+1)步的误差方向与第i步的探索方向为共轭关系。另外,由式(5.14)可得误差的递推关系为

代入式(5.16)整理可得(利用关系{r(i)}=-[A]{g(i)})

现在的问题是如何构建互为共轭的向量{d(i)}(i=0,1,…,n-1)。很自然,初始探索方向可取为残差方向,{d(0)}={r(0)}={b}-[A]{x(0)}。这点与最速下降法相同。但从第2步开始(i>0),共轭梯度法的探索方向{d(i+1)}对最速下降法的探索方向{r(i+1)}做以下修改

即从第2步开始(i>0),共轭梯度法的探索方向{d(i+1)}偏离了残差方向。这是与最速下降法不同的地方。通过选择式(5.17)中的系数β(i+1),来保证{d(i)}满足互为共轭的条件。
给方程式(5.17)两边同乘{d(i)}T[A],得

为了满足共轭条件{d(i)}T[A]{d(i+1)}=0,β(i+1)应该取为

方程式(5.18)含有第(i+1)步的残差{r(i+1)},可以通过下式算出:
从方程式(5.17)及(5.18)看,好像只能说明{d(i+1)}与{d(i)}互为共轭,但事实上,{d(i+1)}也满足与{d(0)},{d(1)},…,{d(i-1)}互为共轭的条件。这是共轭梯度法最大的优点。详细的证明在这里就不做说明。
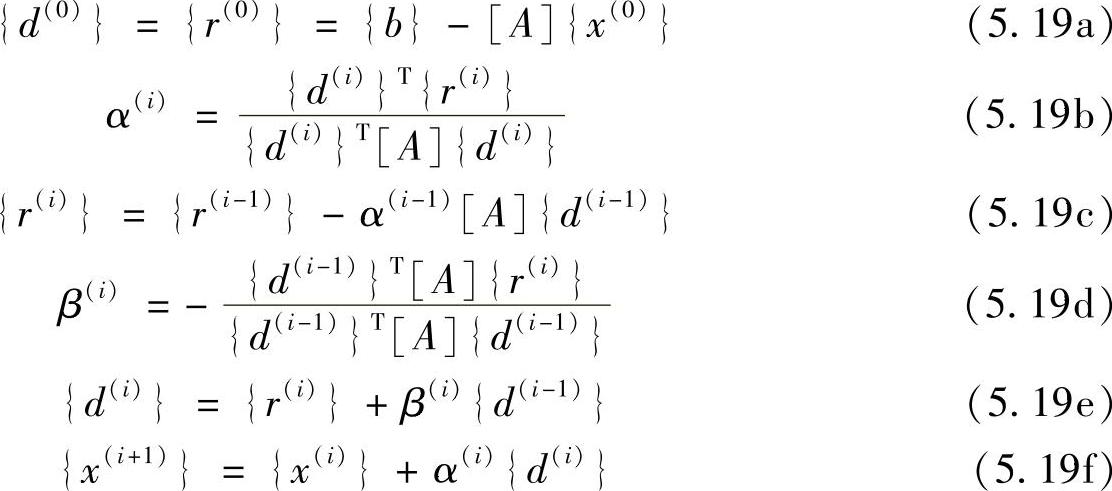
归纳起来,用共轭梯度法进行迭代运算的过程可以表示为
对前面所示例子应用共轭梯度法进行迭代运算(见图5.3),从初始值(x1=-2,x2=-2)开始,经过两步探索过程,即可到达真值(x1=2,x2=-2)。
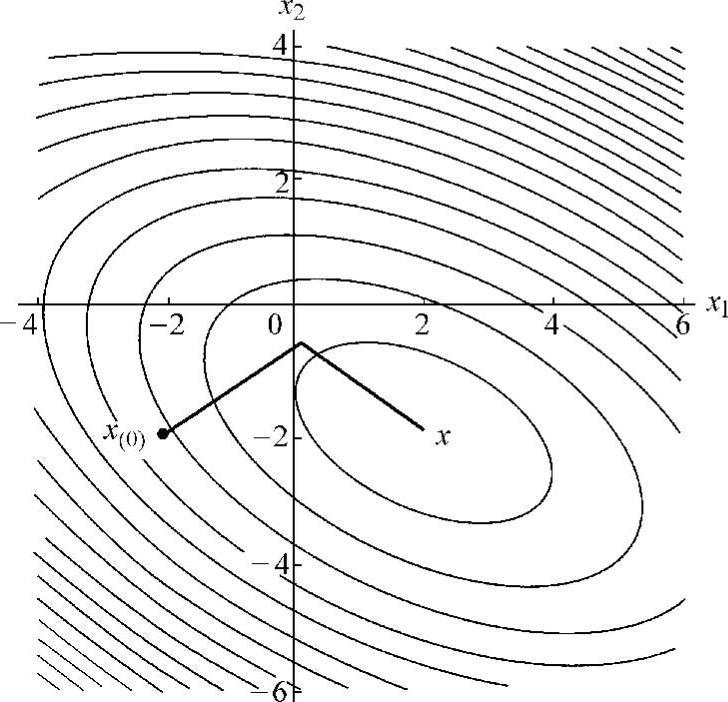
图5.3 共轭梯度法的例子
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。