



1.交流异步电动机的电磁转矩
电磁转矩T(以下简称转矩)是三相异步电动机最重要的参数之一,它表征一台电动机拖动生产机械能力的大小。机械特性是它的主要特性。
从三相异步电动机的工作原理可知,三相异步电动机的电磁转矩是由于具有转子电流I2的转子导体在磁场中受到电磁力F作用而产生的,因此电磁转矩的大小与转子电流I2以及旋转磁场的每极磁通Φ成正比。从转子电路分析可知,转子电路是一个交流电路,它不但有电阻,而且还有漏磁感抗存在,所以转子电流I2与转子感应电动势E2之间有一相位差,用φ2表示。于是转子电流I2可分解为有功分量I2cosφ2和无功分量I2sinφ2两部分,只有转子电流I2的有功分量I2cosφ2才能与旋转磁场相互作用而产生电磁转矩。也就是说,电动机的电磁转矩实际是与转子电流I2的有功分量I2cosφ2成正比。综上所述,三相异步电动机的电磁转矩表达式为:
T=KTΦI2cosφ2 (2-1)
式中,KT为仅与电动机结构有关的常数;Φ为旋转磁场的每极磁通;I2为转子电流;cosφ2为转子回路的功率因数。从电工技术中可知I2和cosφ2为:
将式(2-2)和式(2-3)代入式(2-1),并考虑到E1=4.44f1N1Φ和忽略定子电阻R1和漏感抗X1上的压降,则U1=E1,可得出转矩的另一个表达式为:

式中,K为与电动机结构参数、电源频率有关的一个常数;U1、U分别为定子绕组相电压、电源电压;R2为转子每相绕组的电阻;X20为电动机不动(n=0)时,转子每相绕组漏感抗。式(2-4)所表示的电磁转矩T与转差率S的关系是T=f(S)曲线,通常叫做T-S曲线。电磁转矩T与每相电压有效值U1的平方成正比。由此可见,当电源电压变化时,对电磁转矩影响很大;当电压U1一定,转子参数R2和X20一定时,电磁转矩与转差率S有关。
2.交流异步电动机的机械特性
在异步电动机中,当定子电压U1、频率f1和参数一定条件下,电动机电磁转矩T与转差率S的关系T=f(S)通常叫做T-S曲线。为了符合习惯画法。可将T-S曲线转换成转速n与转矩T之间的关系曲线n=f(T),称为异步电动机的机械特性。它有固有机械特性和人为机械特性之分。
(1)固有机械特性
异步电动机在额定电压和额定频率下,用规定的接线方式,定子和转子电路中不串联任何电阻或电抗时的机械特性称为固有(自然)机械特性,如图2-13所示。曲线1为电源正相序时的固有机械特性;曲线2为负相序时的曲线。其特点如下:
①在0<S≤1,即0<n<n0的范围内,特性在第一象限,电磁转矩T与转速n都为正,电动机工作在电动状态,电动机轴输出机械功率。
②在S<0范围内,n>n0,特性在第二象限,电磁转矩T<0为负值,工作在发电状态,电动机的轴机械功率转化为电能。
③在S>1范围内,n<0,特性在第四象限。T>0,电动机处于一种制动状态。
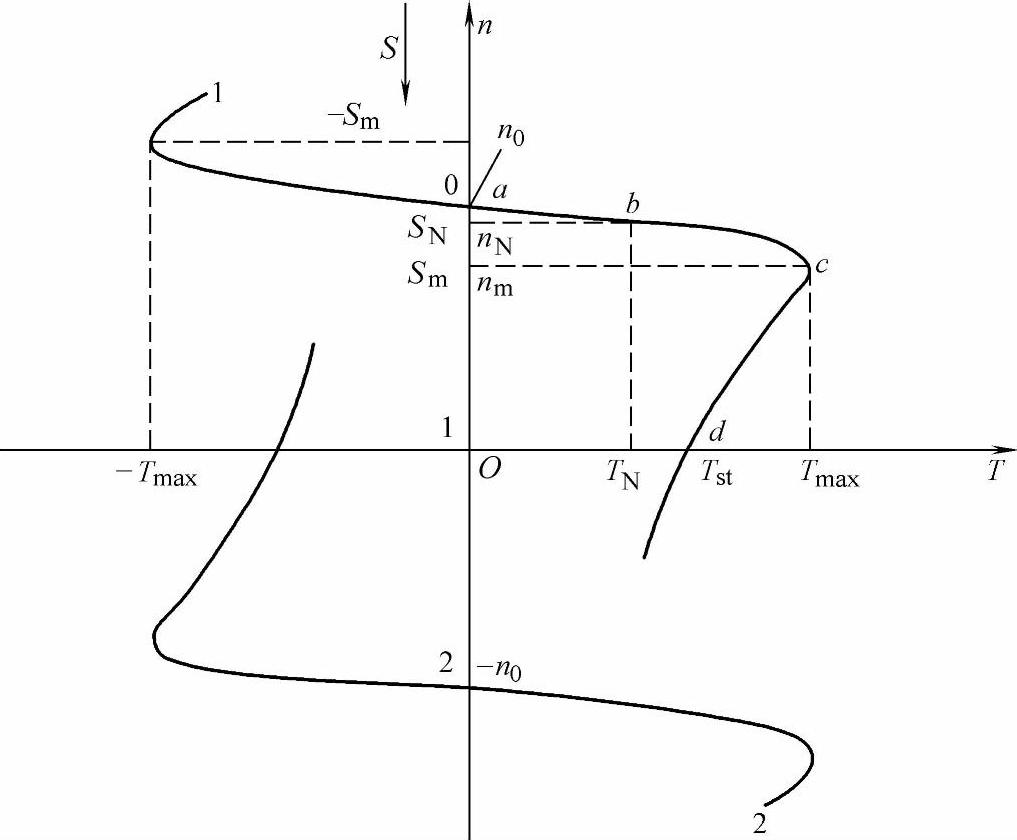
图2-13 电动机的固有机微特性
从特性曲线上可以看出,其中有4个特殊点可以决定特性曲线的基本形状和异步电动机的运行性能,这4个特殊点是:
①T=0,n=n0,S=0,电动机处于理想空载转速(同步转速)n0。实际上由于摩擦力矩的存在,电动机的理想空载转速只是一个理论值,对应图2-13中的a点。
②T=TN(电动机输出额定转矩),n=nN,S=SN为电动机额定工作点,对应图2-13中的b点。此时,TN=9550PN/nN,SN=(n0-nN)/n0。一般nN=(0.94~0.94)n0;SN=0.06~0.15。
③T=Tmax,n=nm,S=Sm,为电动机的临界工作点,对应图2-13中的c点。此时的转矩Tmax称为电动机最大转矩;速度nm为临界速度;转差率Sm为临界转差率,是表征电动机运行性能的重要参数之一。当电动机的负载转矩超过此点时。电动机的输出转矩将会急剧下降,转速也会随之下降,甚至造成堵转。
由式(2-4),令dT/dS=0,得到临界转差率为:
Sm=R2/X20 (2-5)
将式(2-5)代入式(2-4),可得:
Tmax=KU2/2X20 (2-6)
由式(2-5)和式(2-6)可看出,最大转矩Tmax的大小与定子每相绕组上所加电压U的平方成正比,这说明异步电动机对电源电压的变化是很敏感的。电源电压过低,会使轴上输出转矩明显降低,甚至小于负载转矩,而造成电动机停转;最大转矩Tmax的大小与转子电阻R2的大小无关,但临界转差率Sm却正比于R2,这对绕线转子异步电动机而言,若在转子电路中串接附加电阻,则Sm增大,而Tmax则不变。(https://www.xing528.com)
异步电动机在运行中经常会遇到短时冲击负载,冲击负载转矩小于最大电磁转矩时,电动机仍然能够运行,而且电动机短时过载也不会引起剧烈发热。通常把在固有机械特性上的最大电磁转矩与额定电磁转矩之比:
λm=Tmax/TN称为电动机的过载能力系数,它表征了电动机能够承受过负载的能力大小。一般三相异步电动机的λm=1.6~2.2。绕线型转子电动机的λm=2.5~2.8,往往大于笼型异步电动机,这就是绕线转子电动机多用于起重、冶金等冲击性负载机械设备上的原因。
④T=Tst,n=0,S=1,为电动机的起动工作点,对应于图2-13中的d点。此时的转矩称为电动机起动转矩,是表征电动机运行性能的重要参数之一。因为起动转矩的大小将影响到电动机拖动系统加速度的大小和加速时间的长短。如果起动转矩太小,在一定负载下电动机有可能起动不起来。
将S=1代入式(2-4),可得:

可见异步电动机的起动转矩Tst与定子每相绕组上所加电压U的平方成正比,当施加在定子每相绕组上的电压U降低时,起动转矩下降明显;当转子电阻适当增加时,起动转矩会增大,这是因为转子电路电阻增加后,提高了转子回路的功率因数,转子电流的有功分量增大(此时E20一定),因而起动转矩增大;若增大转子电抗,则起动转矩会大为减小,这是所不需要的。通常把在固有机械特性上的起动转矩与额定转矩之比λst=Tst/TN作为衡量异步电动机起动能力的一个重要数据,一般λst=1~1.2。
在实际应用中,用式(2-4)计算机械特性非常麻烦,如把它化成用Tmax和Sm表征的形式则方便多了。为此,用式(2-4)除以式(2-5),经整理后可得:
T=2Tmax/(S/Sm+Sm/S) (2-8)式(2-8)为“转矩-转差率”特性的实用表达式,也叫规格化“转矩-转差率”特性。根据该式,当转差率S很小,即S<Sm时,则S/Sm远远小于Sm/S,若忽略S/Sm,则有:T=2TmaxS/Sm。表示转矩T与转差率S成正比的直线关系,即异步电动机的机械特性呈线性关系。工程上常把这一段特性曲线作为直线来处理,这一段曲线叫做机械特性曲线的线性段。一般三相异步电动机在运行中,负载会变化(如车床切削进给量的大小,起重重物的改变等),使电动机的转速n随负载转矩的的变化而变化。由图2-13可见,当负载转矩T增大时,其转速n会下降;随着转速n的下降,转差率S增大,又使转子电流I2增加,同时也使cosφ2减小,使电动机转矩不断增大。当电动机转矩等于变化后的负载转矩时,电动机将在较低的转速n下稳定运行。所以电动机带负载运行时,一般应工作在图2-13所示的线性段。
(2)人为机械特性
由式(2-4)可知,异步电动机的机械特性除与电动机的参数有关外,还与外加定子电压Ul、定子电源频率f1、定子或者转子电路中串入的电阻或电抗等有关,将这些参数人为地加以改变而获得的机械特性称为异步电动机的人为机械特性。在电气控制系统中,人们可以通过合理地利用人为机械特性对异步电动机进行起动或者调速控制等,下面介绍几种人为机械特性。
①降低电动机电源电压时的人为机械特性。当电源电压降低时,由n0=60f/p,式(2-5)和式(2-6)可以看出,理想空载转速n0和临界转差率Sm与电源电压无关,而最大转矩Tmax却与U2成正比。当降低定子电压时,n0和Sm不变,而Tmax大大减小。在同一转差率情况下,人为特性与固有特性的转矩之比等于两者的电压平方之比。因此,在绘制降低电源电压时的人为机械特性时,是以固有特性为基础,在不同的S处,取固有特性上对应的转矩乘以降低电压与额定电压比值的平方,即可作出人为机械特性曲线,如图2-14所示。从图中可以看出,降低电压后电动机的机械特性是通过n0点的曲线簇,其线性段的斜率增大。例如当Ua=UN时,Ta=Tmax;当Ub=0.8UN时,Tb=0.64Tmax;当Uc=0.5UN时,Tc=0.25Tmax;…。电压越低,人为机械特性曲线越往左移。由式(2-7)可知,起动转矩Tst也随U2成比例降低。故异步电动机对电源电压的变化非常敏感,运行时,如果电压降得太多,会大大降低它的过载能力和起动转矩,甚至电动机会发生带不动负载或根本不能起动的现象。例如,电动机运行在额定负载TN下,即使λm=2,若电网电压下降到70%UN,由于这时Tmax=λmTN(U/UN)2=2×(0.7)2TN=0.98TN,电动机就会停转。此外,电网电压下降,在负载不变的条件下,将使电动机转速下降,转差率S增大,电流增加,引起电动机发热,甚至烧坏。
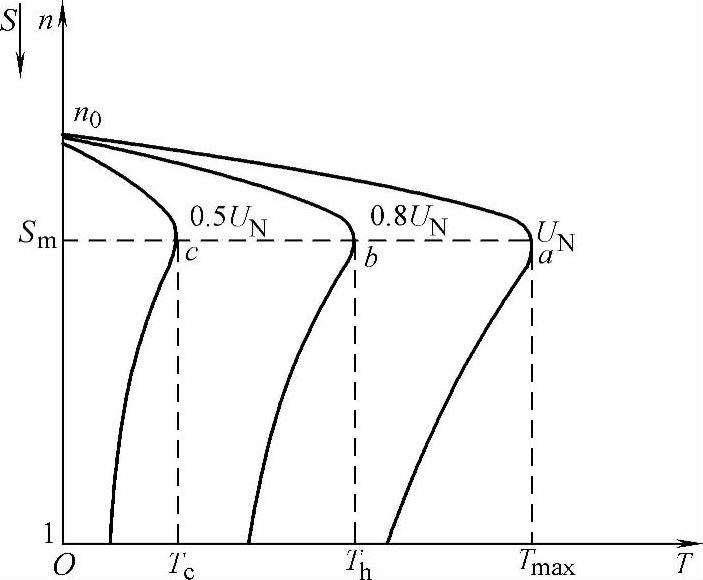
图2-14 改变电源电压时纳人为机械特性
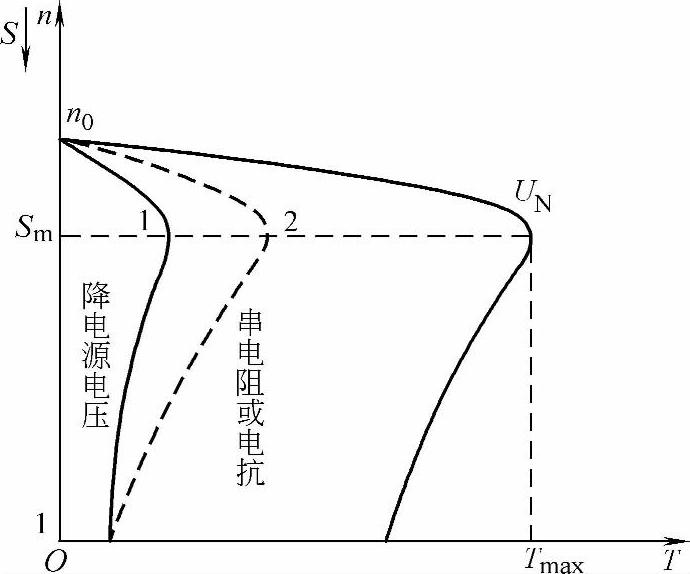
图2-15 定子电路外接电阻或电抗时的人为机械特性
在实用中常采用的软起动器就是采用晶闸管(SCR)调压调速的原理而设计的起动装置。
②定子电路接入电阻或电抗时的人为机械特性。在电动机定子电路中外串电阻或电抗后,电动机端电压为电源电压减去定子外串电阻上或电抗上的压降,致使定子绕组相电压降低,这种情况下的人为特性与降低电源电压时相似。如图2-15所示。图中实线1为降低电源电压的人为特性;虚线2为定子电路串入电阻或电抗时的人为特性。从图中可以看出,串入电阻或电抗后的最大转矩Tmax要比直接降低电源电压时的最大转矩Tmax大一些。因为随着转速的上升和起动电流的减小,在电阻或电抗上的压降减小,加在电动机定子绕组上的端电压自动增大,致使最大转矩大一些。而降低电源电压时的人为特性在整个起动过程中,定子绕组上的端电压是恒定不变的。
因此,在一些要求简单、花费较少的电动机起动场合,在起动过程中.通常采用串接电阻或电抗器起动的方法,以减小对电网的冲击。常用的手动起动补偿器就属于采用串接电抗器减压起动的实例。
③改变定子电源频率时的人为机械特性。改变定子电源频率f1对三相异步电动机机械特性的影响是比较复杂的,下面仅定性地分析一下n=f(T)的近似关系。根据n0=60f/p和式(2-5)~(2-7),并注意到X20∝f,K∝1/f,且一般变频调速采用恒转矩调速,即希望最大转矩Tmax保持为恒值,为此在改变频率f的同时,电源电压U也要做相应的变化,使U/f=常数,这在实质上是使电动机气隙磁通保持不变。在上述条件下就存在有n0∝f,Sm∝1/f1和Tmax不变的关系,即随着f1频率的降低,理想空载转速n0要减小,临界转差率Sm要增大,起动转矩Tst要增大,而最大转矩Tmax维持不变。如图2-16所示。
④转子电路串电阻时的人为机械特性。在三相绕线转子异步电动机的转子电路中串入对称电阻R2r,如图2-17a所示。此时转子电路中的电阻为R2+R2r,由n0=60f/p、式(2-5)和式(2-6)可以看出,R2r的串入对理想空载转速n0、最大转矩Tmax没有影响,但临界转差率Sm则随着R2r的串入而增大,人为特性的线性部分斜率也随着R2r的串入而增大,此时的人为特性将是一根比固有机械特性软的一条曲线,如图2-17b所示。很明显,串入的电阻越大,临界转差率亦越大。可选择适当的电阻R2r串入转子电路中,使Tmax发生在Sm=1的瞬间,即:使最大转矩发生在起动瞬间,以改善电动机的起动性能。
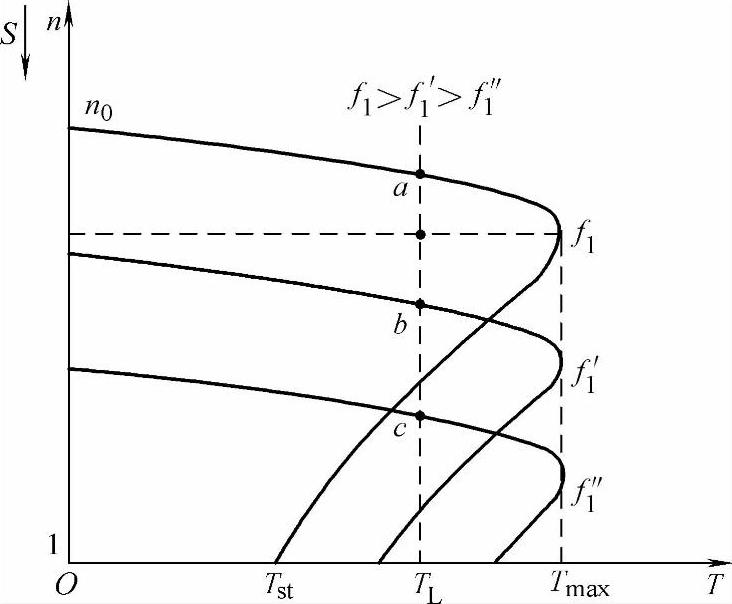
图2-16 改变定子电源频率时的人为机械特性
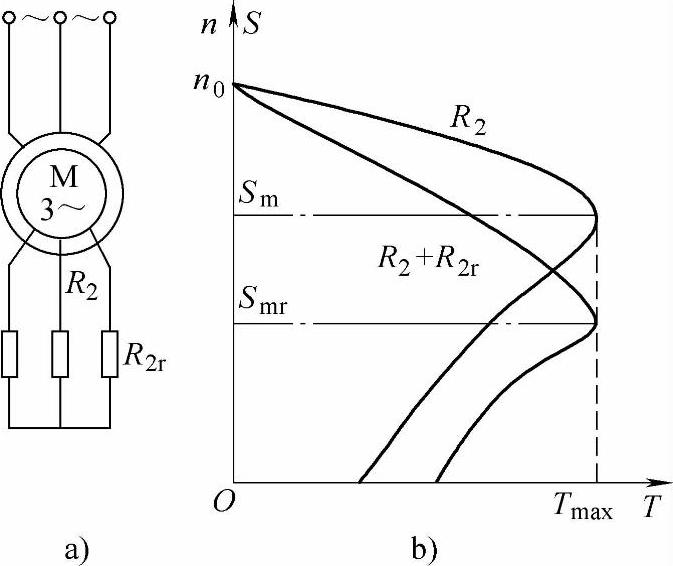
图2-17 转子电路串电阻的人为机械特性
a)电路图 b)机械特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。