



生产机械的转矩特性是指负载静阻转矩与转速之间的关系,即TL=f(n)。生产机械的种类繁多,性能及工艺要求各异,其转矩特性是复杂的。人们在实践中大体将生产机械的转矩特性分成三种类型:恒转矩负载,恒功率负载和风机、泵类负载。
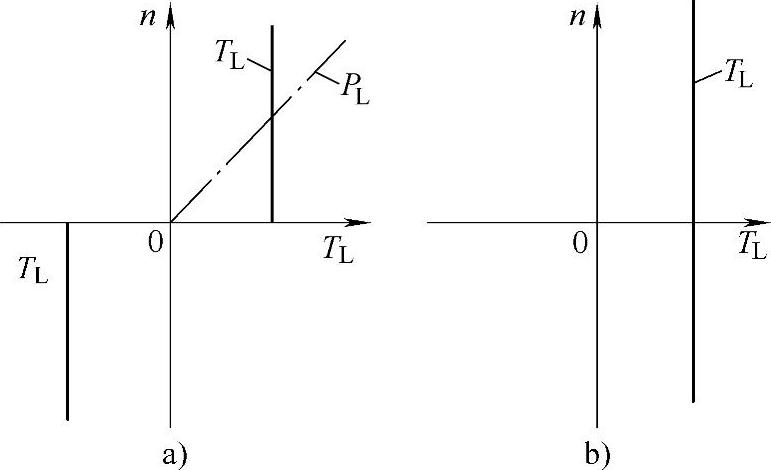
图3-19 生产机械的恒转矩特性
a)摩擦类负载 b)位能类负载
1.恒转矩负载 负载转矩TL与转速n无关,任何转速下TL总保持恒定或基本恒定,这类负载称为恒转矩负载。传送带、搅拌机、挤压机等摩擦类负载,起重机、提升机等重力负载(或称位能负载),都属于恒转矩负载,图3-19a所示为摩擦负载,图3-19b所示为位能负载。由于功率与转矩、转速两者之积成正比,所以生产机械所需的功率与转速成正比,如图3-19a中所示。电动机的功率应与最高转速下的负载功率相适应。
摩擦负载静阻转矩的作用方向总是与旋转方向相反,旋转方向改变后,负载转矩的方向也随之改变。位能负载是由重力引起的,其方向不因转速的方向的改变而改变。
变频器驱动恒转矩性质的负载时,低速下的转矩要足够大,并且有足够的转矩过载能力。对于U/f控制方式的变频器而言,应有低速下的转矩提升功能。前面曾经分析过,低速下如果U/f的值不足,电动机产生的转矩可能无法满足起动或低速稳速运行的需要。如果U/f的值过大,又可能使电动机出现高饱和。因此,对U/f特性的仔细调整是十分必要的。通用变频器的转矩提升强度是可以人为设定和调整的。如果采用具有转矩控制功能的第二代通用变频器,对恒转矩负载就更合适。这类变频器具有U/f模式的自动调整功能,低速下的过载能力比较大。
如果需要在低速下稳速运行,应该考虑由于负载转矩不变,电动机定子电流亦基本不变,而通用标准异步电动机的散热能力却变坏的因素,为了避免引起电动机的温升过高。采取如下措施:
(1)考虑采用强迫通风式电动机。
(2)改造原有设备,另设恒速风扇。
(3)适当地提高电动机和变频器的容量,减小其负载系数。
2.风机、泵类负载 在各种风机、水泵、油泵中,随叶轮的转动,空气或液体在一定的速度范围内所产生的阻力大致与转速n的2次方成正比。随着转速的减小,转矩按转速的2次方减小,日本的资料称为“2次方递减转矩负载”,如图3-20所示。
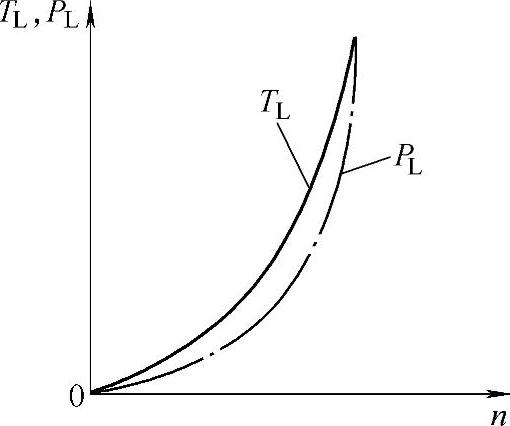
图3-20 风机、泵类负载的转矩特性
这种负载所需的功率与速度的3次方成正比。当所需风量、流量减小时,利用变频器通过调速的方式来调节风量、流量,可以大幅度地节约电能。由于低速下负载转矩减小,这最适合通用的U/f变频器。当惯量GD2较大且起动较快时,还应事先校核起动转矩是否满足要求。
考虑电动机的容量时,应按流体机械最高可能转速(一般为额定转速)下的功率来决定。
由于高速时所需功率随转速增长过快,与n3成正比,所以通常不应使风机、泵类负载超工频运行。
3.恒功率负载 机床主轴和轧钢、造纸机、塑料薄膜生产线中的卷取机、开卷机等所要求的转矩,大体与转速成反比,这就是所谓的恒功率负载,如图3-21所示。其中(pu)表示标幺值。(https://www.xing528.com)
负载的恒功率性质应该是就一定的速度变化范围而言的。当速度很低时,受机械强度的限制,TL不可能无限增大,在低速下则转变为恒转矩性质。负载的恒功率区和恒转矩区对传动方案的选择有很大的影响。电动机(无论是直流电动机还是异步电动机)在恒磁通调速时,最大允许输出转矩不变,属于恒转矩调速;而在弱磁调速时,最大允许输出转矩与转速成反比,属于恒功率调速。如果电动机的恒转矩和恒功率调速的范围与负载的恒转矩和恒功率范围相一致时,即所谓“匹配”的情况下,电动机的容量和供电装置(例如通用变频器)容量均最小。但是,如果负载要求的恒功率范围很宽,要维持低速下的恒功率关系,对变频调速而言,电动机和变频器的容量不得不很大,装置的成本会加大。在可能的情况下,尽量采用一种折衷方案,适当地缩小恒功率范围(当然是以满足生产工艺要求为前提),以减小电动机和变频器的容量,降低成本。这种折衷方案应在对生产工艺仔细分析之后决定实施。
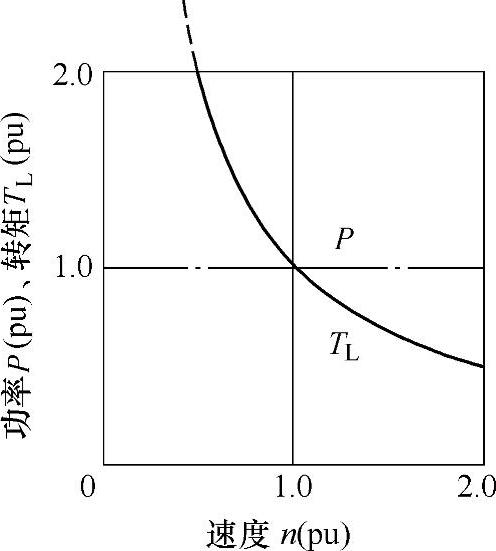
图3-21 恒功率负载
利用变频器、异步电动机传动恒功率负载时,通常考虑在某个转速以下采用恒转矩调速方式,而在高于该转速时才采用恒功率调速方式。如图3-22所示,将恒转矩和恒功率范围的分界点的转速作为基速,速度的标幺值取为n(pu)=1.0。当n(pu)<1.0采用恒转矩方案,对U/f控制变频器采用E1/f1=C的协调控制方式;当n(pu)>1.0采用恒功率方案,变频器采用E21/f=C(即E1/f1=C)或者恒压运行(即f1上升而E1保持不变)的协调控制方式。这就是常说的,基速以下恒转矩,基速以上恒功率。
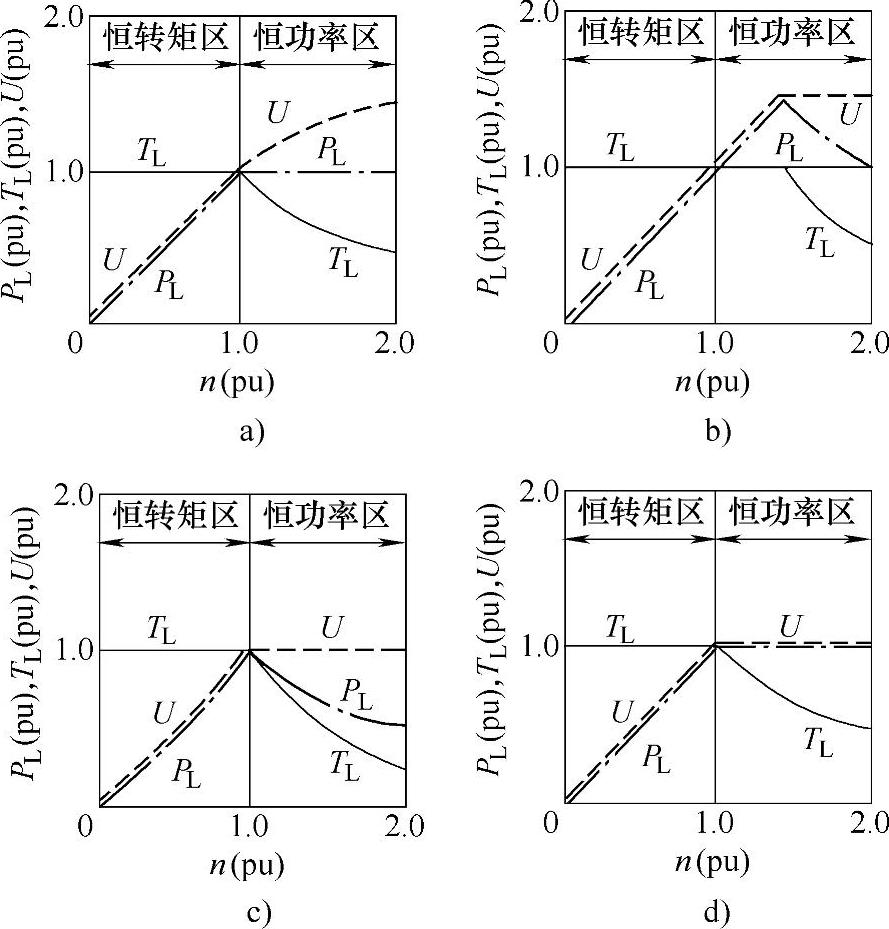
图3-22 恒功率负载的传动方式(恒功率范围为1∶2)
a)负载要求的转矩特性 b)传动图a负载时电动机的输出界限 c)按基速选择电动机的情况(转差角频率一定时) d)按基速选择电动机的情况(转差角频率增大时)
在基速n(pu)=1.0以上直到n(pu)=α的范围内进行恒功率控制的情况下(α>1.0),恒功率调速范围为1∶α,可以称为1∶α恒功率调速。
图3-22a所示为1∶2恒功率调速,在这里恒功率范围调速比为α=2。如2.7节所述,恒功率调速,在ω2(转差角频率)保持不变的条件下,协调控制条件为E21/f=C。当采用矢量控制方式(可以保证ω2=C)时,在恒功率范围内电动机的电压(即变频器的输出电压)的控制应随电动机的转速n(近似地看成变频器的输出频率)按 的比例一同增加。由于电磁转矩在转差角频率保持不变的条件下与(E1/f1)2成正比,见式(2-9c),在转速的标幺值n(pu)=2.0的点则有(E1/f1)2=(
的比例一同增加。由于电磁转矩在转差角频率保持不变的条件下与(E1/f1)2成正比,见式(2-9c),在转速的标幺值n(pu)=2.0的点则有(E1/f1)2=( /2)2=1/2的关系,即转矩是基速下转矩的1/2。
/2)2=1/2的关系,即转矩是基速下转矩的1/2。
图3-22的作图,忽略了定子漏阻抗压降的影响,认为电动机端电压近似等于感应电动势,即U1=E1。因此,恒转矩范围内的低速区所需要的电压补偿关系略去未画。
变频器输出电压的最大值,可以近似地认为与变频器网侧的电源电压相同。最高速度n(pu)=2.0应与变频器的最高输出电压对应。例如,变频器电源电压为200V,则在n(pu)=2.0的点上电动机所加的电压为200V,那么当n(pu)=1.0时电动机所加的电压则是上述值的1/ ,大约为140V。
,大约为140V。
如按上述情况选定变频器(可以考虑变频器的最高输出电压,即额定电压对应于最高转速n(pu)=2.0,而受半导体器件限制的变频器额定电流对应于基速n(pu)=1.0情况下所需的电流),那么与之相匹配的电动机的输出能力的界限则如图3-22b所示。如果直到变频器的电源电压为止一直保持E1/f1一定,即实现恒转矩控制,则图中所示的电动机的输出转矩、功率的范围可扩大。允许将恒转矩控制的范围延伸到n(pu)=1.4处,相应的电动机的输出功率也为图3-22a中负载所需功率(n(pu)=1.0处的功率)的1.4倍,即 倍。在这种情况下,电动机的功率有下述关系:
倍。在这种情况下,电动机的功率有下述关系:

式中 α——恒功率调速范围的转速比。
实际上,前面对变频器容量的选定也与上述关系相类似。在此不再深入分析。
图3-22c给出了在基速下变频器输出最大电压;而在基速以上的恒功率区,变频器输出电压保持不变的恒压运行方式下的输出特性。在最高转速n(pu)=2.0下的电压,仅为按理想的E1/f1=C情况所需电压的1/2,所以转矩为1/4,而功率为1/2。上述是考虑转差角频率ω2不变的情况,实际上,采用U/f控制变频器时,考虑到ω2可以增大,可得到图3-22d所示的恒功率特性。
对大多数的通用变频器,常可保证图30-22d所示的恒功率特性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。