



简化的模糊逻辑控制器包括四个主要部分:
1)输入接口;
2)判定规则矩阵;
3)推理过程;
4)输出接口。
(一)控制变量
模糊控制器用非线性图形来描述从输入变量到输出变量的过程。控制器根据测量值来确定风力机运行条件,并根据判定规则矩阵选择适当的动作。根据系统状态,控制器在“不动作”和“大动作”之间,以非线性的方式进行调节。模糊控制器并不含动态部件,因此它在理论上可以即时根据判定规则进行校正控制。
根据隶属等级的概念,模糊集合中每一元素的隶属度通常由一个[0,1]范围内的权重因子来确定。模糊集合用于建立被测量的控制变量的文字模型。被测量的变量被称为文字变量,并根据文字变量的隶属度,用非线性隶属函数来确定其图上位置。
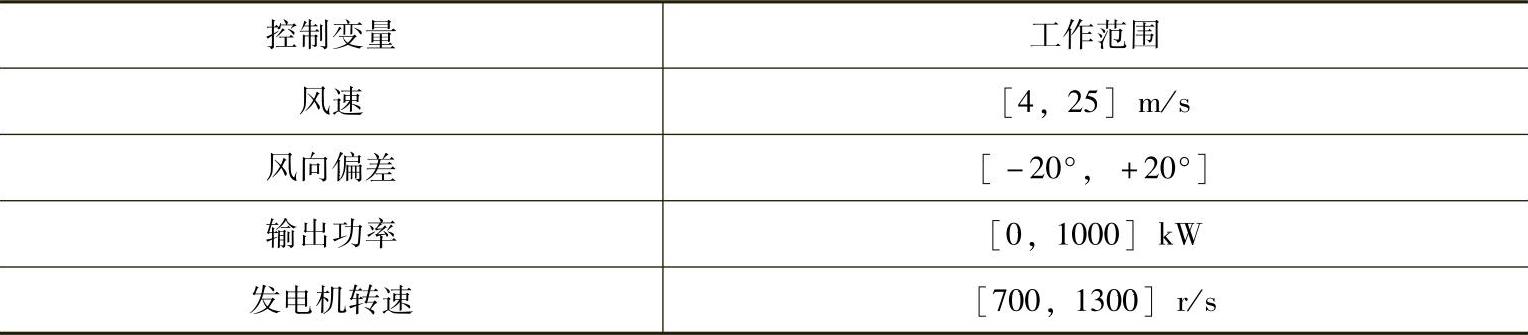
风电机组的关键控制变量包括风速、功率和转速,它们的工作范围见表9-1。
由于风速是不可控制的,因此只有其他三个变量可以接受模糊控制器的控制。
表9-1 风力机控制变量的工作范围
(二)隶属函数
模糊控制隶属函数的定义简要介绍如下:
如果X为一个目标集合,则模糊集合A在X中是一组顺序数对:
A={(x,μA(x)),x在X中且μA(x)为隶X到进入[0,1]区间的映射} (9-1)
其中,μA(x)被称作是A中x的模糊隶属函数。
定义模糊隶属函数时,代表模糊控制输入变量的文字变量,必须分成几个部分。在给每一文字变量选择范围时,必须考虑到模糊控制器能够有效地根据输入变量和它们的时间增量来决定系统特性的变化趋势;同时还要选择适当的隶属函数,来设计模糊控制器,使控制变量能够维持在平衡点附近,并能保持在预先确定的范围之内。我们以调整风向偏差为例,为风向偏差、偏差增量和模糊修正定义模糊集合。这些模糊集合是
F={PM,PS,ZR,NS,NM}
其中的缩写表示:
PM—正中;PS—正小;ZR—近零;NS—负小;NM—负中。其模糊隶属函数如图9-2和图9-3所示。
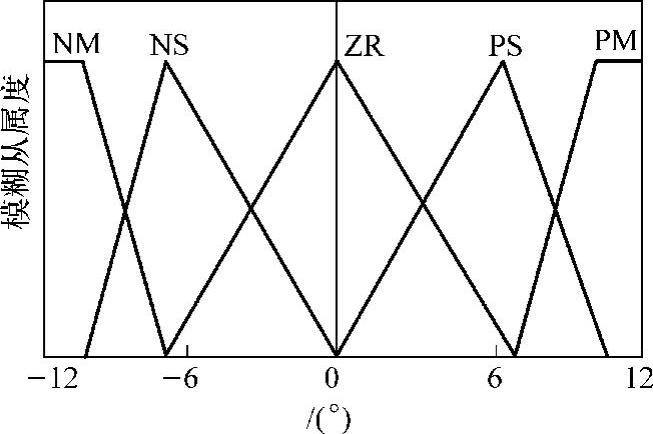
图9-2 风向偏差
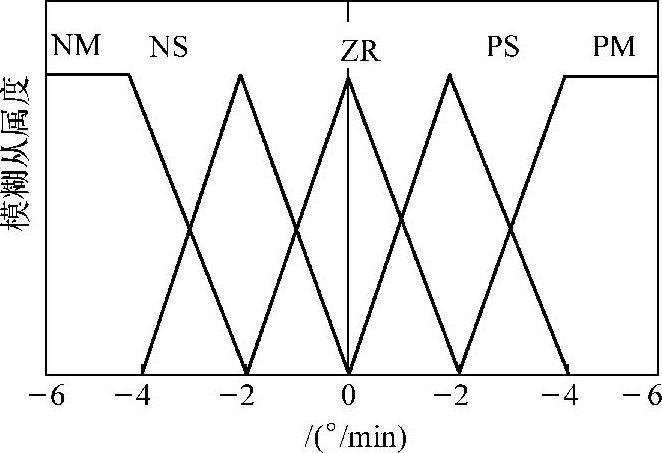
图9-3 风向偏差的增量
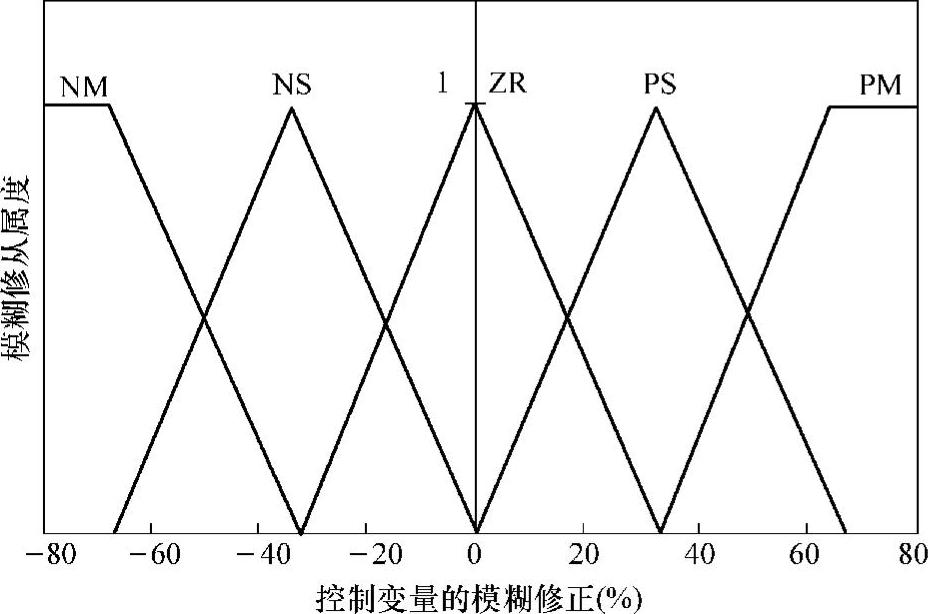
模糊修正的隶属函数(见图9-4)表示输入控制变量工作范围的一个百分比,将它馈入系统可以抑制控制变量的偏差。
 (https://www.xing528.com)
(https://www.xing528.com)
图9-4 模糊修正的隶属函数
(三)判定规则矩阵
一般说来,可以为每一个输入变量定义共5×5=25个规则。但是,模糊逻辑控制器的应用经验说明,往往只需利用其中的几个规则,系统性能就可以得到很好的控制。判定规则以IF(A)、AND(B)、THEN(C)的形式进行公式化,其中,A、B是两个前提,而C是结果。
第一个前提与控制变量有关,第二个前提与它的时间增量有关,而结论则与控制变量扰动时的模糊修正有关。规则的两个部分的模糊逻辑运算基于以下的合成规则:
μC(c)=min[μA(a),μB(b)] (9-2)
式中μA(a)和μB(b)——A和B前项的模糊隶属值;
μC(c)——结论C的模糊隶属值。
举例来说,风向偏差的模糊修正判定规则见表9-2。
表9-2 风向偏差时的模糊修正的判定规则
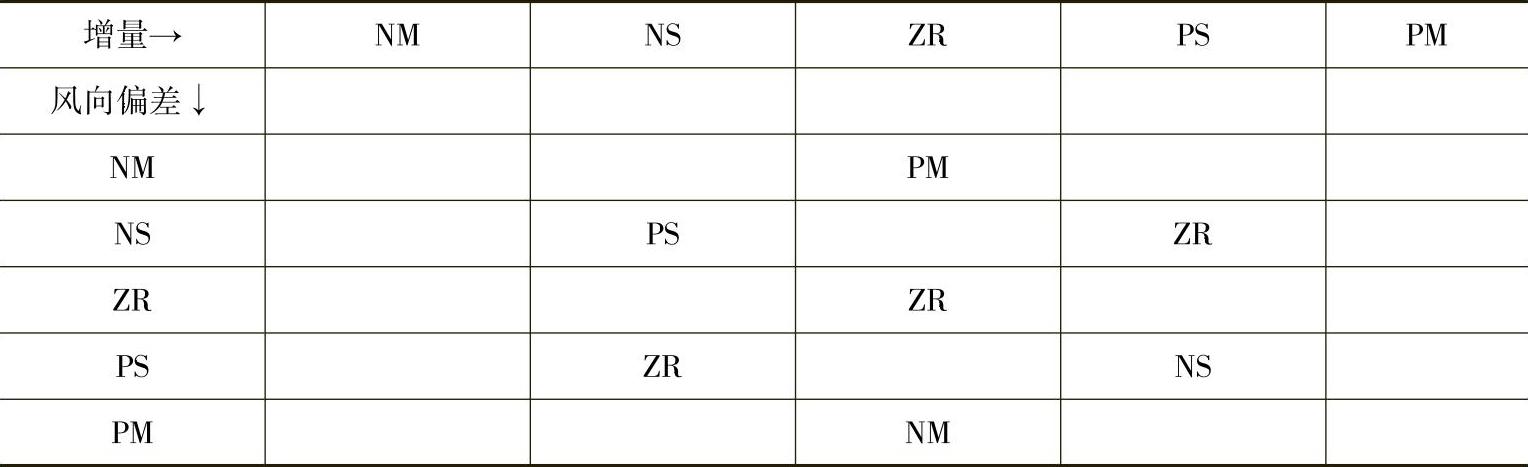
或用IF(A)AND(B)THEN(C)规则形式表示:
1)IF“风向偏差PM”AND“风向偏差增量ZR”THEN“风向偏差模糊修正NM”;
2)IF“风向偏差PS”AND“风向偏差增量PS”THEN“风向偏差模糊修正NS”;
3)IF“风向偏差PS”AND“风向偏差增量NS”THEN“风向偏差模糊修正ZR”;
4)IF“风向偏差NM”AND“风向偏差增量ZR”THEN“风向偏差模糊修正PM”;
5)IF“风向偏差NS”AND“风向偏差增量NS”THEN“风向偏差模糊修正PS”;
6)IF“风向偏差NS”AND“风向偏差增量PS”THEN“风向偏差模糊修正ZR”;
7)IF“风向偏差ZR”AND“风向偏差增量ZR”THEN“风向偏差模糊修正ZR”。
(四)输出控制变量
模糊输出控制变量的确定实际上是一个反模糊化过程,将模糊修正集合转化为控制变量定义范围内的真实值。反模糊化过程可通过中心平均法来进行(根据参考文献[21]介绍,中心平均解模糊器是最好的解模糊器)。
设μe为模糊输出集合的隶属函数,eu为模糊修正量(见图9-4),这样馈入系统的输出控制值将以如下公式进行计算:

式中 wj——第j个模糊输出集合的中心;
μj——第j个模糊输出集合的高度;
y——控制器的精确输出量。
即如之前所述,最终控制信号将被表示为输入控制变量运行范围的一个百分比来进行计算。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。