



MPC是一种基于优化的控制策略,能够非常自然地处理约束和多变量(Multivariable)控制问题。多变量工业过程是指被控过程包含多个输入变量和/或多个输出变量。流程工业的控制对象通常是多变量过程,输入与输出之间的关系不是一对一的。这里,一个容易忽略的事实是:对同一个过程,取多一些变量与取少一些变量相比,前者可能更容易实现控制器,满足控制要求。假使一个系统应该具有10个输入10个输出,则人为取5个输入时,可能或者造成自由度降低,或者供前馈的信息减少;而人为取5个输出进行优化,则未必能够反映对另外5个输出的要求。假设要建立水、空气污染程度(输出)和工业发展状况(输入)之间的关系模型,则同时考虑相邻几个地区的模型可能更好些,毕竟水和空气是流通的;也许加入风向、风速和降雨量等作为干扰变量,更科学些。在这个关于污染的例子中,如果考虑的因素不够,甚至难以得到有效的模型。所以,从科学性的角度看,不能担心变量多。
模型预测控制中,使用最多的模型是线性经验模型[38],简称线性模型。线性模型大致可以分为两大类:输入输出模型和状态空间模型;或者基于另外一种分类方法:参数化模型和非参数化模型。状态空间模型属于参数化模型,而输入输出模型包括:非参数化的输入输出模型、输入输出参数化模型。下面以离散时间模型为例,给出几种常用的模型形式。
1.状态空间模型
在理论上研究成果最丰富的,恐怕要属状态空间模型了。对线性时不变离散时间系统,其状态空间方程为

其中, x=x-xeq,
x=x-xeq, u=u-ueq,
u=u-ueq, y=y-yeq,{xeq,ueq,yeq}为{x,u,y}的稳态工作点(平衡点);
y=y-yeq,{xeq,ueq,yeq}为{x,u,y}的稳态工作点(平衡点); 、
、 和
和 分别为过程的输入(包括MV和DV)、输出和状态;A、B、C、D为系统参数矩阵;
分别为过程的输入(包括MV和DV)、输出和状态;A、B、C、D为系统参数矩阵; 为零均值过程噪声;
为零均值过程噪声; 为零均值量测噪声(关于噪声的各种名字因具体场合而不同,但通常无本质区别)且满足
为零均值量测噪声(关于噪声的各种名字因具体场合而不同,但通常无本质区别)且满足

其中,κpq为Kronecker符号。这表明ηk和ξk都是白噪声。
考虑如下的状态空间方程(也称为积分状态空间方程):
其中,Δ=1-z-1为差分算子[即Δx(k)=x(k)-x(k-1)],其他符号的意义以及{η,ξ}(k)的性质同前。方程(1-15)可以变换为

这种形式的好处是利用{u,y}(k)的增量数据进行辨识时,不会加强噪声的不利影响。采用增量数据进行辨识的好处是不需要知道{u,y}(k)的稳态工作点。
省略Δ和 ,将式(1-13)和式(1-16)统一表示为
,将式(1-13)和式(1-16)统一表示为

该模型与如下模型具有同样的一般性:

其中,E、F为系统参数矩阵。也就是说,式(1-18)并非是比式(1-17)更一般的描述,因为如果ηk和ξk是白噪声,则 和
和 也是白噪声。模型(1-17)与如下模型具有同样的一般性:
也是白噪声。模型(1-17)与如下模型具有同样的一般性:

因为 和
和 ,本质上式(1-18)和式(1-19)具有同样的形式。由第2章的讨论可知,即使要求ηk和ξk不相关,即要求式(1-14)中S=0,对线性状态空间模型的描述而言也没有带来更多的特殊性。
,本质上式(1-18)和式(1-19)具有同样的形式。由第2章的讨论可知,即使要求ηk和ξk不相关,即要求式(1-14)中S=0,对线性状态空间模型的描述而言也没有带来更多的特殊性。
2.ARX模型
ARX(AutoRegression with eXogenous input)模型是一种输入输出参数化模型。与非参数化模型相比,参数化模型的结构是紧凑的,且可以准确地表示线性系统。
直接省略{y,u}前的 或Δ,则ARX模型的数学表达式为
或Δ,则ARX模型的数学表达式为
A(q-1)y(k)=B(q-1)u(k)+ξ(k) (1-20)
其中, 、
、 和
和 分别为输入(即eXogeneous input)、输出和零均值过程噪声;{A,B}(q-1)为相应的多项式矩阵。当{y,u}前省略的是Δ时,式(1-20)也称为ARIX(AutoRegression Integral with eXogenous input)模型。注意u可能包括MV和DV,DV包括可测干扰和不可测干扰。
分别为输入(即eXogeneous input)、输出和零均值过程噪声;{A,B}(q-1)为相应的多项式矩阵。当{y,u}前省略的是Δ时,式(1-20)也称为ARIX(AutoRegression Integral with eXogenous input)模型。注意u可能包括MV和DV,DV包括可测干扰和不可测干扰。
ARX模型具有以下特点:
(1)可以直接表示稳定、不稳定动态过程,较之下面介绍的非参数化模型适用范围更加广泛。
(2)准确度与阶次有关,在模型辨识过程中需要指定模型的阶次。
当ξ(k)=A(q-1)e(k)、且A(q-1)可逆时,得到
y(k)=A(q-1)-1B(q-1)u(k)+e(k) (1-21)
这个模型被称作OE(Output Equation)模型。
记

其中,{A1,…,An}的维数为ny×ny,{B0,B1,…,Bm}的维数为ny×nu,皆为常数矩阵。当ξ(k)=0且A(q-1)可逆时,得到从u到y的矩阵分式描述,即
y(k)=G(q-1)u(k),G(q-1)=A(q-1)-1B(q-1) (1-22)
在研究控制策略时,经常采用G(q-1)的最简形式,即
称为从u到y的传递函数矩阵。通常,传递函数矩阵中的模型参数较之矩阵分式描述要少得多,但传递函数矩阵用于辨识是不方便的。
除了上述ARX模型的特殊形式外,以下是一些ARX模型的扩展形式:
(1)ARMAX(AutoRegression Moving Average with eXogenous input)
A(q-1)y(k)=B(q-1)u(k)+C(q-1)ξ(k) (1-23)
当省略的是{y,u}前的Δ时,也称为ARIMAX(AutoRegression Integral Moving Average with eXogenous input)模型。当C(q-1)ξ(k)≡0时,称为确定性自回归滑动平均(Deterministic AutoRegression Moving Average,DARMA)模型。
(2)Box-Jenkins(https://www.xing528.com)
y(k)=A(q-1)-1B(q-1)u(k)+D(q-1)-1C(q-1)ξ(k) (1-24)
(3)一般模型
F(q-1)y(k)=A(q-1)-1B(q-1)u(k)+D(q-1)-1C(q-1)ξ(k) (1-25)
在科学研究中,经常首先给出连续时间的传递函数矩阵模型G(s),这样的G(s)更能直观地展示模型的物理意义,也为更多人所熟知(如时间常数、零极点、模态等概念);然后离散化后,得到以上所讨论的离散时间的输入输出参数化模型。
3.非参数化输入输出模型
输入输出模型包括参数化模型和非参数化模型。有限脉冲响应(Finite Impulse Response,FIR)模型与有限阶跃响应(Finite Step Response,FSR)模型都是典型的非参数化模型。FIR模型和FSR模型都只适用于描述稳定型过程。
直接省略{y,u,f,v}前的 或Δ,则对于一般的MIMO系统,FIR模型的一般形式为
或Δ,则对于一般的MIMO系统,FIR模型的一般形式为

其中, 、
、 、
、 、
、 、
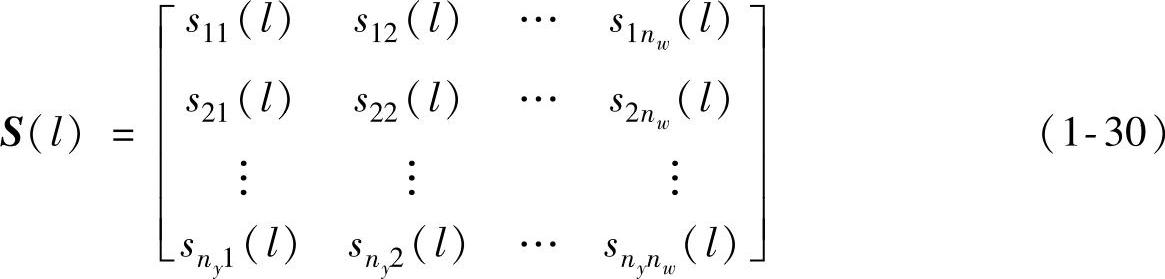
、 分别表示可控输入、被控输出、可测干扰、不可测干扰、零均值量测噪声;l反映了时间的次序。此时的脉冲响应是有限的。模型参数H反映了过程输入与输出之间的多变量脉冲响应关系,即由多个单入单出(Single Input Single Output,SISO)脉冲响应模型h构成的系数矩阵。具体地,对具有nw个输入和ny个输出的MIMO过程,其脉冲响应系数矩阵如下:
分别表示可控输入、被控输出、可测干扰、不可测干扰、零均值量测噪声;l反映了时间的次序。此时的脉冲响应是有限的。模型参数H反映了过程输入与输出之间的多变量脉冲响应关系,即由多个单入单出(Single Input Single Output,SISO)脉冲响应模型h构成的系数矩阵。具体地,对具有nw个输入和ny个输出的MIMO过程,其脉冲响应系数矩阵如下:
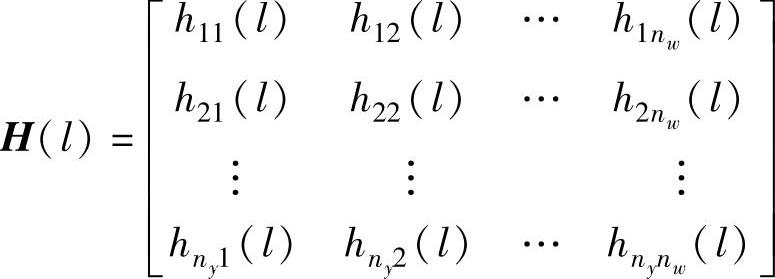
其中,hij(l)为针对第j个输入和第i个输出的第l个脉冲响应系数。本质上,FIR模型也是一种ARX模型,具有如下形式:
y(k)=B(q-1)u(k)+Ef(q-1)f(k)+Ev(q-1)v(k)+ξ(k) (1-27)
当省略了{y,u,f,v}前的 时,式(1-27)是ARX模型的特例;当省略的是Δ时,式(1-27)是ARIX模型的特例。在MPC工程实践中,由于所处理的对象多为慢过程,通常以分钟级的时间单位作为采样周期,以多变量过程中达到稳态时间最长的SISO子过程作为选择模型时域{Nu,Nf,Nv}的基准。一个SISO系统的FIR模型为
时,式(1-27)是ARX模型的特例;当省略的是Δ时,式(1-27)是ARIX模型的特例。在MPC工程实践中,由于所处理的对象多为慢过程,通常以分钟级的时间单位作为采样周期,以多变量过程中达到稳态时间最长的SISO子过程作为选择模型时域{Nu,Nf,Nv}的基准。一个SISO系统的FIR模型为

其中,e(k)为建模误差。与ξ(k)相比,e(k)中包含了未建模干扰的影响等,不过这里没有更多的精细化区别。模型参数h(l)为系统在单位脉冲输入下的输出采样,如图1-4所示。对于稳定的过程,其脉冲响应在某个时刻N后将趋于零。
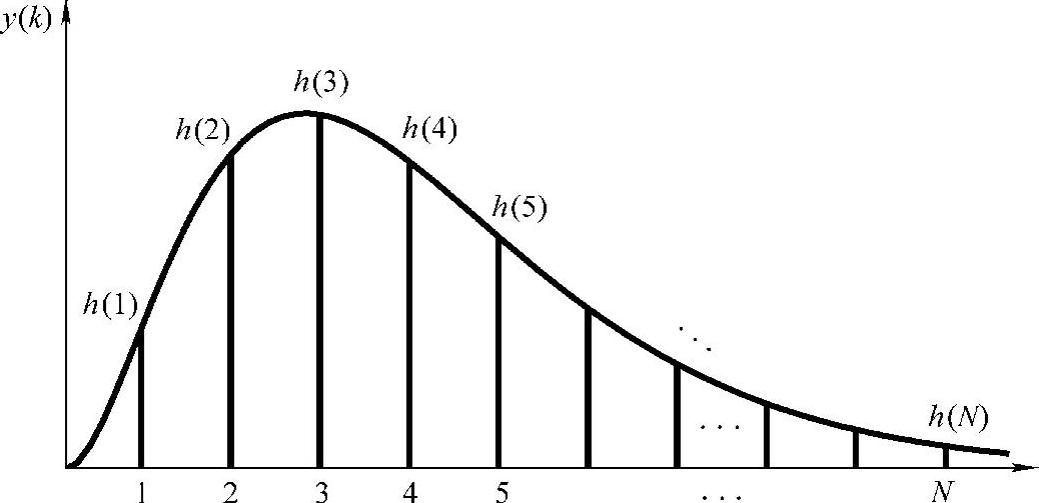
图1-4 线性系统的脉冲响应
直接省略{y,u,f,v}前的 或Δ,则对于一般的MIMO系统,FSR模型的一般形式为
或Δ,则对于一般的MIMO系统,FSR模型的一般形式为
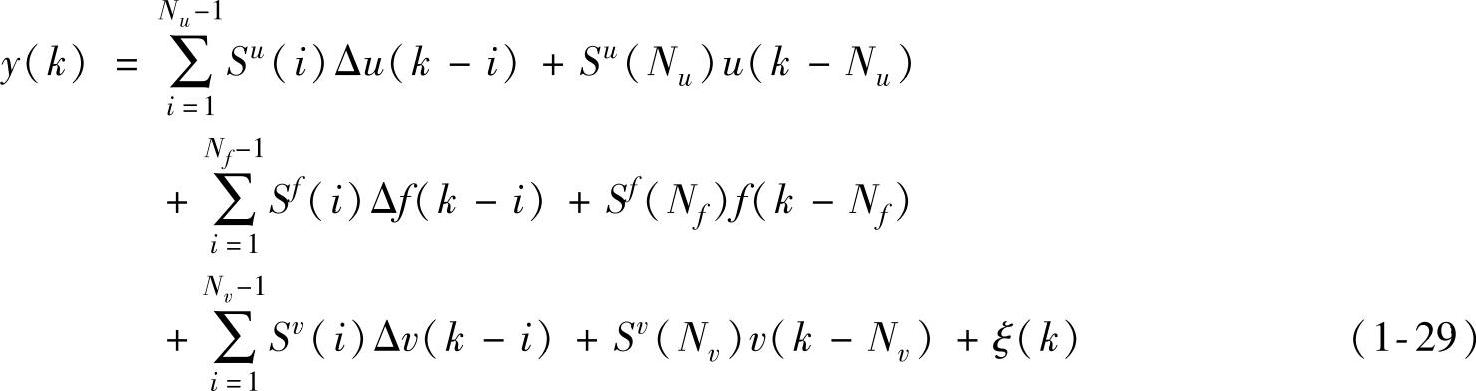
式(1-29)中,S与式(1-26)中H的对应关系为 和H(i)=S(i)-S(i-1),这样即可实现FIR模型与FSR模型的相互转换。同脉冲响应系数矩阵一样,对于具有nw个输入和ny个输出的MIMO过程,其阶跃响应系数矩阵如下:
和H(i)=S(i)-S(i-1),这样即可实现FIR模型与FSR模型的相互转换。同脉冲响应系数矩阵一样,对于具有nw个输入和ny个输出的MIMO过程,其阶跃响应系数矩阵如下:
一个SISO过程的FSR模型为

阶跃响应系数s(j)亦可通过采样单位阶跃输入下的输出获得,如图1-5所示;对于渐近稳定的过程,阶跃响应在某一时刻N后趋于平稳。
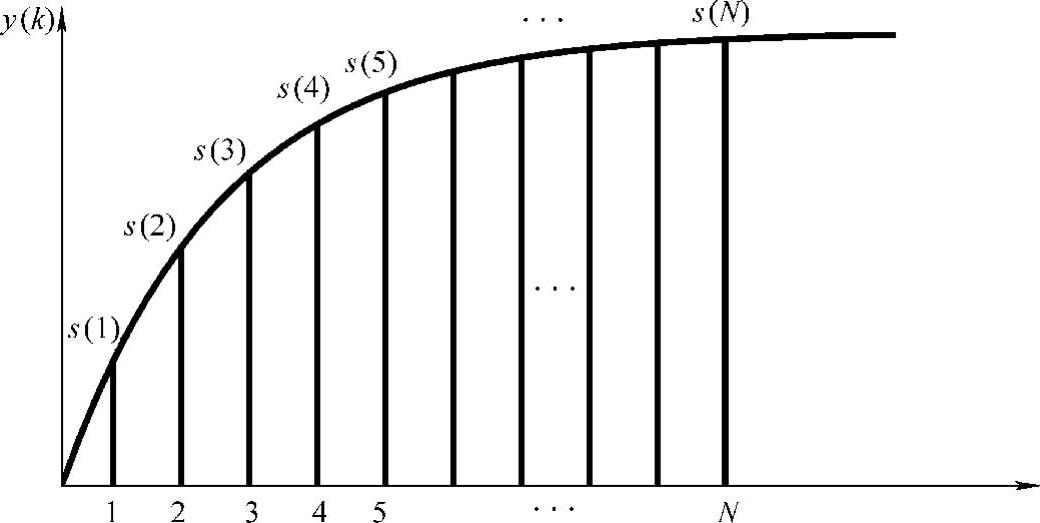
图1-5 线性系统的阶跃响应
例1.2 下面用FIR模型推导FSR模型。省略e(k),将式(1-28)展开,得
y(k)=h(1)u(k-1)+h(2)u(k-2)+…+h(N)u(k-N) (1-32)
令Δu(k-i)=u(k-i)-u(k-i-1),则有

则式(1-32)可改写为
y(k)=h(1)Δu(k-1)+(h(1)+h(2))Δu(k-2)+(h(1)+h(2)+h(3))Δu(k-3)+…+(h(1)+h(2)+…+h(N))u(k-N) (1-33)
应用 可得式(1-31)。由式(1-32)得到式(1-33)有个好听的名字,即其为阿贝尔变换。
可得式(1-31)。由式(1-32)得到式(1-33)有个好听的名字,即其为阿贝尔变换。
4.非线性模型
很多化工过程(如化学反应器)呈现的动态特性是显著的非线性。这类系统的阶跃响应通常与当前工作点、变化幅值、变化方向都有关系。虽然有些时候可以根据过程的非线性特性进行变换,然后再使用线性MPC方法,但基于非线性变换的方法在实际应用中不是万能的。这样,采用一般非线性模型的预测控制也得到了广泛的重视。
具有比较一般意义的非线性模型为

对应式(1-34),一种较特殊的形式为

其中,ψNN(xk,uk)为非线性项,如果被认为是神经网络(Neural Network)也恰好吻合。由于非线性模型可以描述系统的全局特性(至少比线性模型可描述的范围更广),因此不必认为{x,y,u,f,v}前应有 。由于非线性运算不满足叠加原理,直接在{x,y,u,f,v}前加上Δ通常是不可行的。总之,不同于线性的情况,不必认为{x,y,u,f,v}前省略了
。由于非线性运算不满足叠加原理,直接在{x,y,u,f,v}前加上Δ通常是不可行的。总之,不同于线性的情况,不必认为{x,y,u,f,v}前省略了 或Δ。或者换句话说,如果{x,y,u,f,v}前有
或Δ。或者换句话说,如果{x,y,u,f,v}前有 或Δ,则对非线性模型而言不宜省略。
或Δ,则对非线性模型而言不宜省略。
从更一般的意义上来说(不限于流程工业),以上讨论的离散时间模型不必对应某种连续过程,这样离散时间模型[如式(1-34)]表示了变量在不同时刻(不限于固定周期)之间的关系,如经济规律关系、人口发展关系。因此研究这些模型的控制策略总有未预见的价值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。