



在优化汽车行驶性能时遇到多个目标冲突。目标冲突的参数不但可以用所选底盘品质的说明书,而且可用汽车总方案表述:
1)为实现良好的汽车转向性能和弯道行驶性能,根据汽车上的大量组装件,需将汽车微转向运动作为车轮起振、轮胎侧向力和轮胎回位力矩的函数。底盘在不平路面上对直线行驶应产生尽量小的轮胎干扰力和轮胎干扰力矩。因此,在选择汽车方案和组装件时应考虑对底盘和行驶动力学潜力的反作用。
2)弹性运动学的自转向性能随车轮支架连接件的横向刚度的直接变化,在一些桥型中需要高的横向转向杆支架刚度。为隔离车轮/轮胎系统的高频横向振动,车轮引导系统在横向方向的弹性要达到足够的值。为此要优先考虑车桥设计,除了有高的纵向弹性外,在有良好的弹性运动学自转向性能时也要有足够的横向弹性。
3)驱动力和制动力应能直接而不延迟地传递到车身上,即没有因为激振而引起相位差和与振动的耦合效应传递到车身上。这个要求与通过有针对性的纵向弹性和纵向阻尼减轻由于路面引起的冲击的设定目标有冲突。在选择绕横轴有较高旋转刚度的车桥方案和同时对车身有高的车轮支架的纵向弹性时,底盘侧的目标冲突会缓和。在转向轮上纵向弹性和纵向阻尼对激励转向盘的扭振有重要影响。这里,悬架系统的非弹性质量的纵向振动形式(波形)和转向振动形式(波形)的谐振频率位置以及这些振动形式的耦合大小有重要作用。
4)在设计弹性阻尼系统时,主要任务是要在行驶性能和行驶舒适性之间寻找一个好的、符合汽车特性的折中办法。但由于下列情况而变得困难,即不但要调整车道路面和瞬时行驶速度,而且要调整与驾驶人有关的行驶方式。为在调整弹性阻尼系统时缓和目标冲突,在确定汽车总方案时应考虑重心高度、纵倾惯性半径、侧倾惯性半径以及轴距和轮距。这里,半主动和主动控制系统具有很大的潜力,未来将更加倾心于这方面的研究。(https://www.xing528.com)
根据这里列举的目标冲突实例可见,车身必须实现综合性的各种任务。在该例中还特别考虑人们的主观感觉的评价。底盘应实现不太复杂、重量轻、结构空间小、成本低等多项要求,尽可能不影响环境状况(环境兼容),在整个寿命期内具有相同的功能品质。
在这些综合性的任务设置中,行驶动力学闭环控制系统(图7.1-4)不但可缓和前面所说的功能目标的冲突,而且对实现汽车动力学的新的品质作出重要贡献。这时需要在被动的车轮机械引导系统和优化的闭环控制性能之间进行任务分配。由于日益尖锐的全球排放和能源状况,只要主动闭环控制系统比被动的车轮机械引导系统有更大的优势,主动闭环控制系统是可以期待的和可以工程化的。
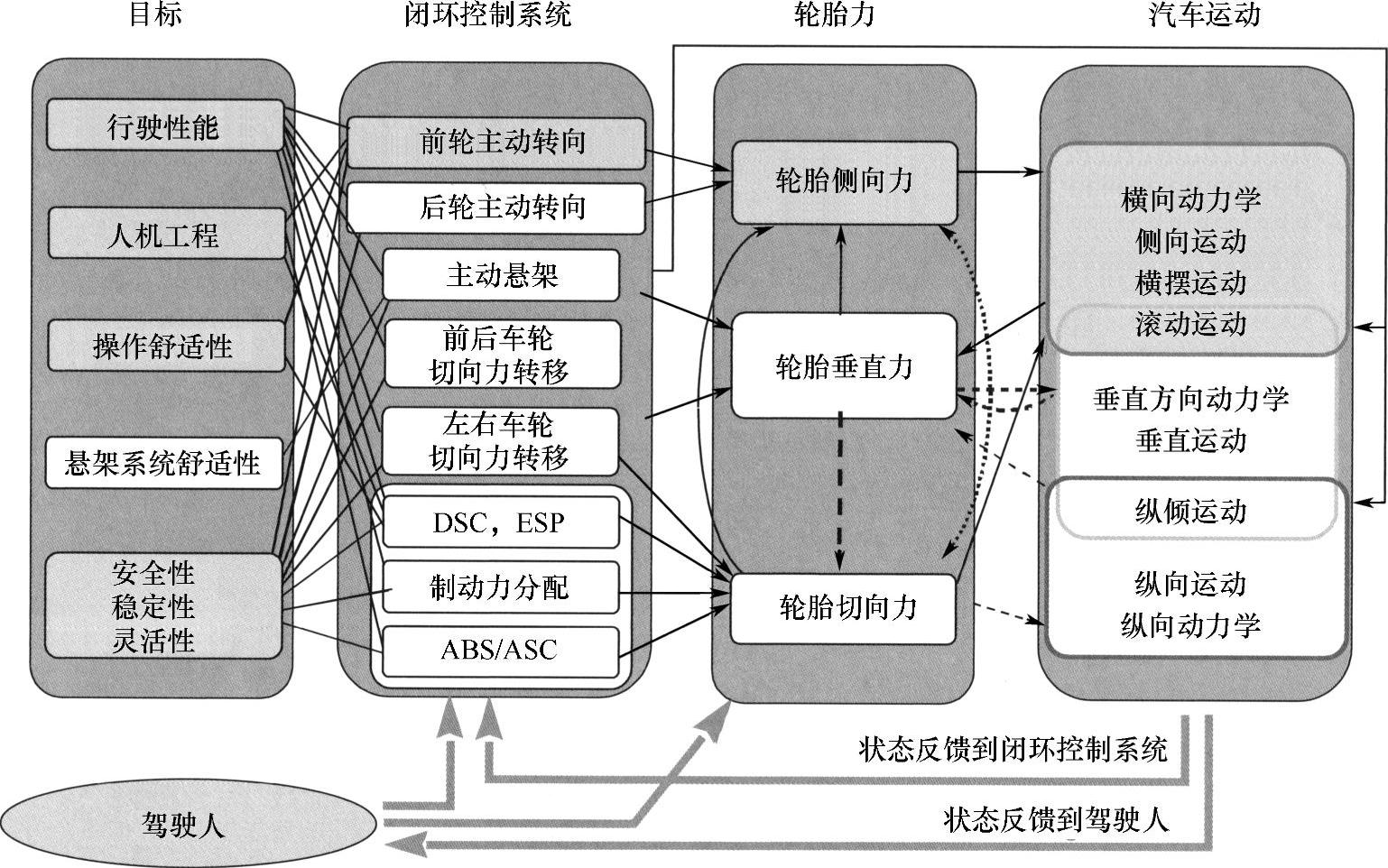
图7.1-4 动态行驶闭环控制系统的相互关系[11]
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。