



本书主要以基于磁场定向矢量控制的交流永磁同步电动机伺服系统为例,对交流伺服系统的设计进行了较为全面和详细的阐述。如图1-2所示,交流伺服系统通常由全数字驱动器、永磁同步电动机及含机械传动机构的负载组成。伺服驱动器内部结构主要分为控制和驱动两部分,控制技术部分通常基于DSP芯片的数字控制系统实现,驱动技术部分通常建立在电压型桥式逆变器拓扑结构下工作。系统的控制对象为永磁同步电动机,但是由于联结电动机与负载的机械传动机构具有柔性,大多数情况下需要对电动机与含机械传动结构的负载作为整体进行振动研究和采取抑振措施。因此,本书会对图里面出现的永磁同步电动机、机械系统、SVPWM技术、控制器、滤波器、逆变器以及传感器等关键部分逐一展开介绍,内容包括基本原理、技术难点和实现等方面,力求能够达到借一斑以窥全豹的目的。
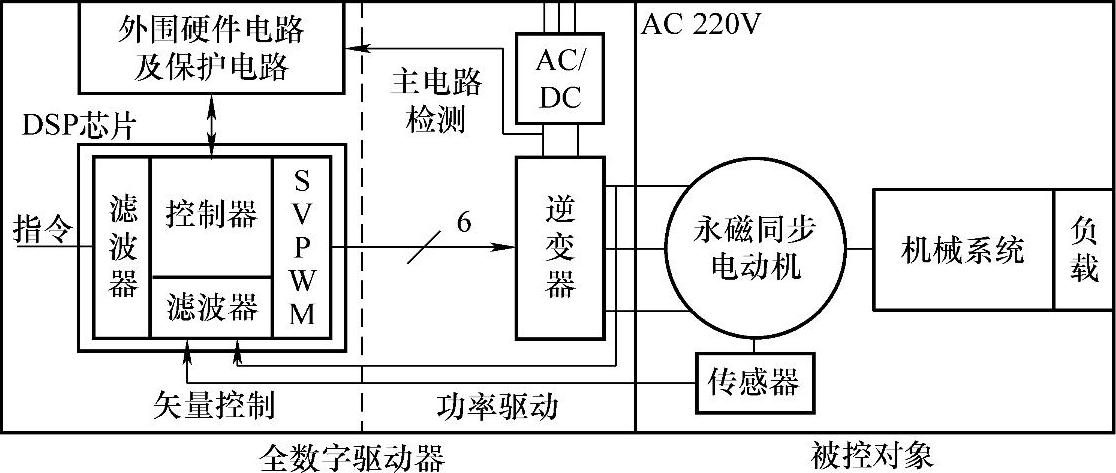
图1-2 伺服系统组成结构框图
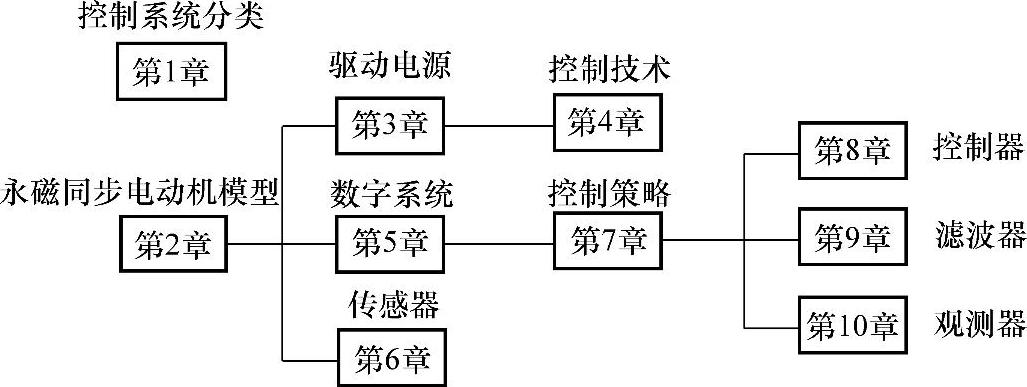
图1-3 本书的编排与章节顺序
图1-3所示为本书的编排与章节顺序。此图会对理解书中各章节的关系有帮助。第1章是单独的一章,不依赖于其他任何章节,有了这一章的知识,实际上已经了解了交流伺服系统。第2章是设计的起点,介绍被控对象及对象建模,它是基础,阅读完第2章就可以开始设计伺服系统了。此时可以开始阅读第3章、第5章或第6章,这3章关系是并列的,无顺序排列。阅读完第3章后,如果进一步了解交流伺服系统是如何工作的,可以阅读第4章。在了解了伺服系统的硬件设计后,接下来就是软件设计,开始阅读第7章,在理解了第7章内容后,可以进入第8章、第9章和第10章的阅读,深入了解与提高性能相关的设计。
第1章 绪论
本章介绍了交流伺服系统的国内外现状、发展趋势及行业应用等情况。从系统的分类及特点得出,基于磁场定向矢量控制的永磁同步电动机交流伺服系统,是目前伺服系统的主流之选。
第2章 三相交流永磁同步电动机
本章介绍了作为伺服系统控制对象的永磁同步电动机的转子结构和特征,通过坐标变换建立了电动机的数学模型,依据模型对电动机的特性常数和转矩波动进行了分析,最后建立了基于永磁同步电动机交流伺服控制系统的基本结构。
第3章 电动机驱动电源和功率器件
本章介绍了驱动电源的主电路和三个重要辅助电路的工作原理及设计,并对驱动电源中主要器件——功率器件IGBT和IPM进行了详细的介绍。
第4章 PWM控制技术
本章介绍了PWM控制的基本原理以及三种典型的PWM控制技术。从逆变器品质主要指标——谐波成分和直流电压利用率上对这三种PWM控制技术进行了比较,最后给出SVP-WM技术实现数字化的方法。(https://www.xing528.com)
第5章 数字控制系统
本章介绍了数字控制系统的一些基础理论知识、系统研究方法以及数字控制器的选择原则等。对照伺服控制系统对数字化性能要求,介绍了一种常用数字控制芯片——数字信号处理器(DSP),最后对数字系统硬件设计的难点——数字地与模拟地问题给出了实用的解决方法。
第6章 传感器技术和检测数据处理
本章介绍了伺服系统中常见的传感器以及检测原理,最后对检测的数据提出了一定的要求,主要包括过采样、转速估计和数据标幺化等。
第7章 三闭环控制系统
本章介绍了基于永磁同步电动机的三闭环控制系统——电流环、速度环和位置环的控制策略,以及连接含机械传动结构负载的抑振控制策略等。
第8章 控制器
本章介绍了伺服系统中关键模块——控制器的PID结构、表达形式以及参数调试和整定等。
第9章 数字滤波器
本章介绍了伺服系统中常见模块——滤波器的特征、功能以及数字结构实现等。
第10章 观测器
本章介绍了伺服系统中可选模块——观测器的结构、运行特性、创建以及应用条件等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。