



从式(5-140)和式(5-144)可以看出永磁辅助同步磁阻电机控制环路的Kp和Ki与永磁辅助同步磁阻电机的电感、电阻、转动惯量和转矩常数有关。如图5-32所示,永磁辅助同步磁阻电机在运行情况下,电机参数会随着温度、电流和频率的变化而变化,如果使用固定比例积分系数Kp和Ki,则会导致电机性能变低、噪声增大、振动变大等不良现象的出现,因此为了获取更佳的电机控制精度和性能,必须使用参数辨识来提高PI参数整定的准确性。参数辨识一般有离线辨识法和在线辨识法,下面将详细介绍电机参数的在线辨识法。
1.电阻在线辨识
在永磁辅助同步磁阻电机控制系统中,影响电机定子电阻的因素有温度和频率。但一般电机运行时频率在几百赫兹以下,相对于温度影响来说,在电机系统运行频率内对电阻的影响较小,所以定子电阻主要受温度影响,温度越高电阻越大,这样会使电机系统运行性能变差,尤其是在低速范围。在线实时辨识永磁辅助同步磁阻电机定子电阻可以减少电阻变化对电机系统性能造成的影响。
电阻的阻值可以表示为
RT=R0(1+α(T-T0)) (5-145)
式中 R0——T0温度时电阻的阻值;
α——材料的温度系数;
RT——实时电阻。
在线辨识永磁辅助同步磁阻电机定子电阻的方法有PI定子电阻估计器法和模型参考自适应法两种。
(1)PI定子电阻估计器法。PI定子电阻估计器法的原理是PI控制原理,根据电流的变化来估算电阻的变化,基本框图如图5-37所示。
PI定子电阻估计器的输入为定子电流矢量的误差Δi。
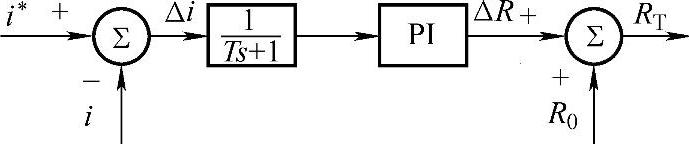
图5-37 PI定子电阻估计器
ΔR=KpΔi+KiΔi/s (5-146)
当定子电阻发生变化时,定子电阻的变化会使电流矢量的幅值发生变化。实际电流矢量幅值与参考电流矢量幅值的误差用于估算定子电阻阻值的变化,直到电流误差为零。因此,定子电阻估计器的稳态误差为零。
(2)模型参考自适应法。
永磁辅助同步磁阻电机的状态方程可以表示为

考虑电机的电阻变化后,电机的可调模型可以表示为

电机的误差模型可以表示为

设计李雅普诺夫函数为

其微分形式为

对于式(5-151)来说,第一项为负项,对于后几项来说,使其等于0就可以满足 ,因此后面几项可以分别表示为
,因此后面几项可以分别表示为

对于e和Rs来说,其变化率远低于电流变化率,因此永磁辅助同步磁阻电机电阻可以表示为

2.电感在线辨识
永磁辅助同步磁阻电机由于存在磁路饱和效应,电机电感随电机系统电流增大而减少,因此电机电感的变化会造成无传感算法估算的转子位置和转子速度误差越来越大,从而造成电机系统性能下降。电机电感在线辨识可以消除误差,提高电机系统性能。永磁辅助同步磁阻电机电感在线辨识方法主要有最小二乘法、扩展卡尔曼滤波法和模型参考自适应法。其中扩展卡尔曼滤波法和模型参考自适应法原理已在前面详细介绍过,下面主要介绍最小二乘法在永磁辅助同步磁阻电机在线参数辨识上的应用。
最小二乘法(Least Square Method)由著名科学家高斯提出,并将其应用到了行星和彗星运动轨道的计算中。高斯在计算行星和彗星运动轨道时,要根据望远镜所获得的观测数据,估计描述天体运动的6个参数值。高斯认为,根据观测数据推断未知参数时,未知参数的最合适数值应是这样的数值,它使各次实际观测值和计算值之间差值的二次方乘以度量其精确度的数值以后的和为最小。这就是最早的最小二乘法思想。
最小二乘法可用于动态系统,也可用于静态系统;可用于线性系统,也可用于非线性系统;可用于离线估计,也可用于在线估计。在随机的环境下,利用最小二乘法时,并不要求观测数据提供其概率统计方面的信息,而其估计结果,却有相当好的统计特性。最小二乘法容易理解和掌握,利用最小二乘法原理所拟定的辨识算法在实施上比较简单。在其他参数辨识方法难以使用时,最小二乘法能提供问题的解决方案。此外,许多用于辨识和系统参数估计的算法往往也可以解释为最小二乘法。所有这些原因使得最小二乘法广泛应用于系统辨识领域,同时最小二乘法也达到了相当完善的程度。
最小二乘法原理框图如图5-38所示。
对于一般离散系统有以下表达式:
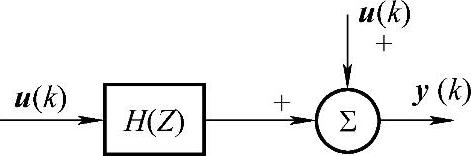
图5-38 最小二乘法原理框图
y(k)+a1y(k-1)+…+any(k-n)=b1u(k-1)+…+bmu(k-m)+e(k) (5-154)(https://www.xing528.com)
在最小二乘法理论中,为了保证任何系统的辨识都能够用最小二乘法求解,需要令m=n。通常m<n时,系统模型误差、量化误差、模拟电路精度不够、噪声、干扰以及其他不确定因素在最小二乘法理论中统一归为残差e(k)。
从式(5-154)可以得到
y(k)=-a1y(k-1)-…-any(k-n)+b1u(k-1)+…+bmu(k-m)+e(k) (5-155)
y(k)=φT(k)θ+e(k) (5-156)
式中
φ(k)=[-y(k-1),…,-y(k-n),u(k),…,u(k-m)]Tθ=[a1,…,an,b1,…,bm]T (5-157)
设辨识参数向量为 ,则第k次观测值输出为
,则第k次观测值输出为 。
。
对于n次观测值,取性能指标函数为

使J达到最小,就能得到最小二乘法计算的辨识参数向量 。
。
因此递推最小二乘(FFRLS)的递推估计式如下:

式中,Pk是协方差矩阵;Kk是增益矩阵;θk是待估算参数矩阵。
由于在实际中,硬件实际内存会导致对末尾数据的舍去,在迭代中会对后续造成较大的误差影响,因此可在性能指标公式中加入遗忘因子,以便减轻过去值在结果中的权重,式(5-158)改写为

λ是遗忘因子,取值范围一般为[0.95,1],λ=1代表对所有残差平等对待。当遗忘因子过小时,参数估计波动会很大;而当遗忘因子太大时,跟踪时变参数的能力就会很弱,从而使辨识结果受影响。
则含遗忘因子的递推最小二乘(FFRLS)的递推估计式如下:

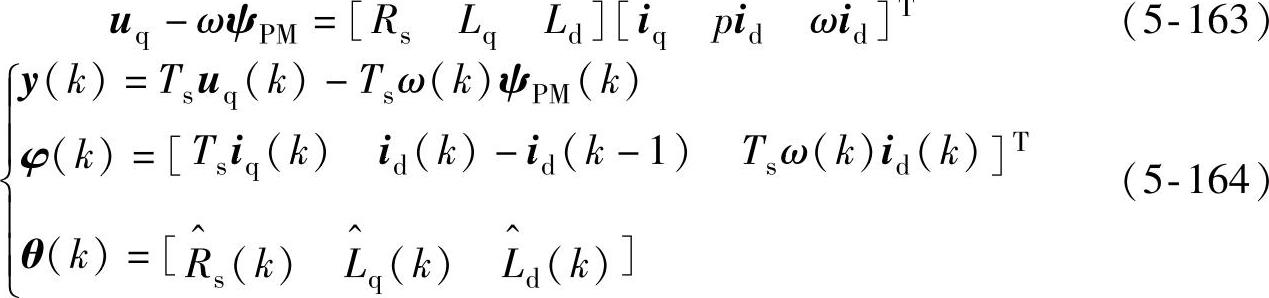
根据式(5-11)和式(5-12)可以得出

式(5-162)可以写成
3.转动惯量在线辨识
采用含遗忘因子的递推最小二乘法在线辨识电机的转动惯量。
电机的机械运动平衡方程为

忽略摩擦力,将式(5-165)离散化后可得到

也可以表示为

在一个采样周期内可以认为负载转矩不变,式(5-166)减去式(5-167)得到

根据式(5-156),可以选取
则含遗忘因子的电机转动惯量最小二乘的递推公式可写为
根据以上公式可以在线辨识出永磁辅助同步磁阻电机的相关参数,实时调节电机控制系统的参数,从而提高系统稳定性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。