



一般而言,有多种方法可用于推导有限元问题的公式,其中包括直接法、最小总势能法、加权余数法。这里有必要指出,无论怎样建立有限元模型,有限元分析的基本步骤都与以上列举的步骤相同。这里通过举例说明介绍直接法。
假设有一端承受载荷P的变截面杆,如图2-1所示。杆一端固定,另一端承受载荷P。以w1代表杆的上端宽度,w2代表杆的下端宽度,杆的厚度为t,长度为L,杆的弹性模量用E表示。当杆件承受载荷P时,沿杆长度方向上有不同大小的变形。求在载荷P作用下,杆末端的位移。在以下的分析中,假设应用的载荷比杆的重量要大得多,因此忽略杆的重量。
1.前处理阶段
(1)将求解域离散成有限个单元
首先将问题分解成节点和单元。为突出有限元分析的基本步骤,仅用5个节点和4个单元来表示整个杆,如图2-2所示。不过,需要说明的是,使用的节点和单元数越多,结果可能越精确。这个任务留给读者作为练习来完成。给定杆的模型中有4个独立的部分,每个部分均有一个统一的横截面(图2-3)。每个单元的横截面积,由构成单元节点处的横截面的平均面积表示。
(2)假定一个近似描述单元特性的解
为了研究典型单元的力学特性,不妨先考虑横截面积为A、长度为l的杆件在外力F作用下构件的变形。
构件的平均应力由下式给出:

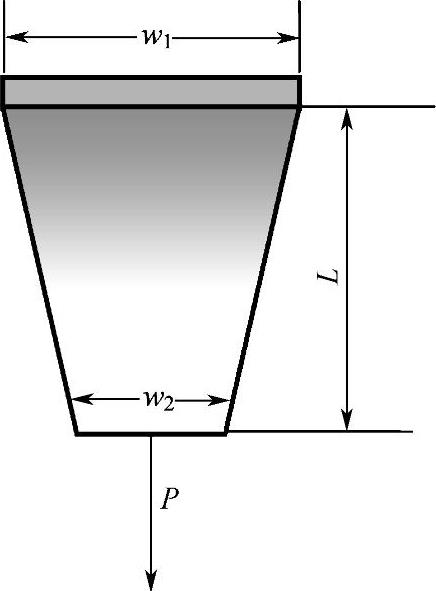
图2-1 承受轴向载荷的杆
构件的平均正应变ε定义为每单位原始长度l与受力前后长度变化Δl的比值:

(3)建立刚度矩阵
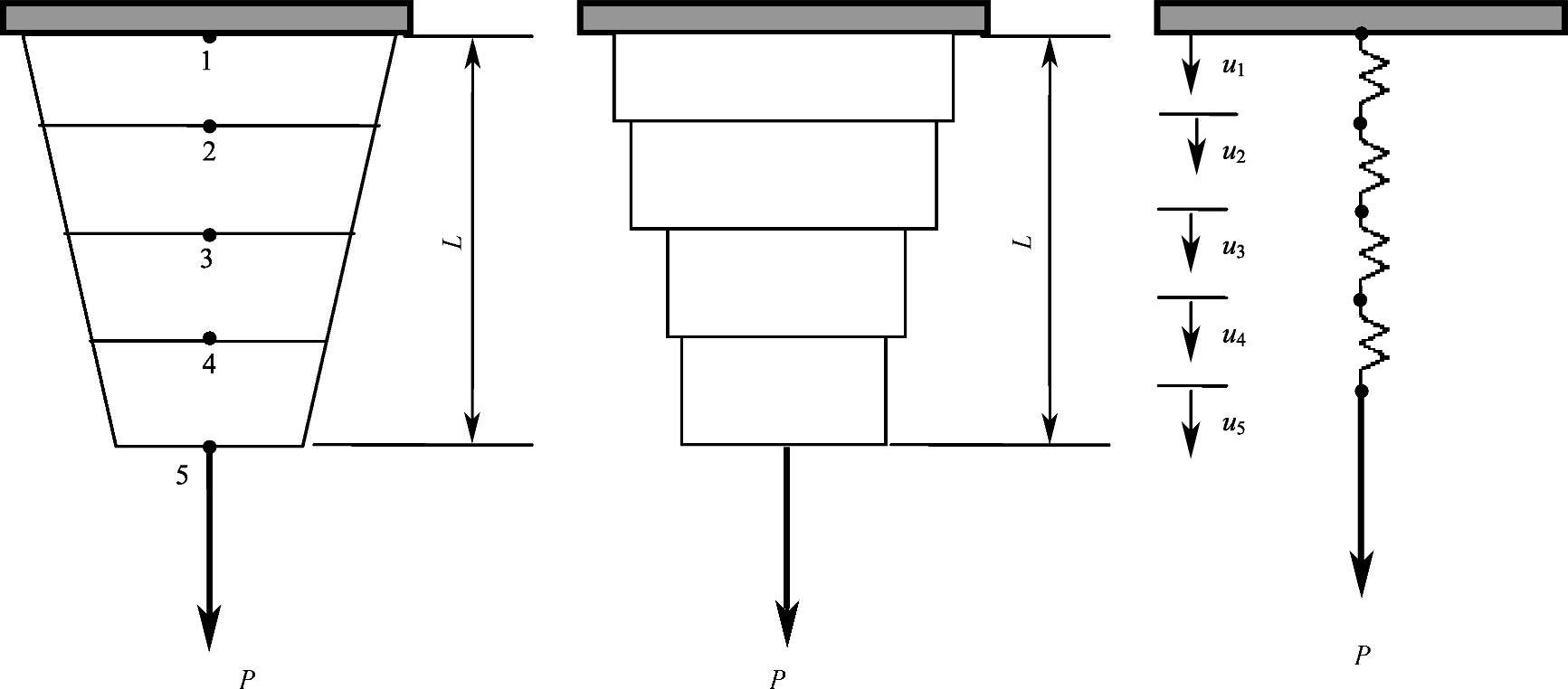
图2-2 将杆离散成节点和单元
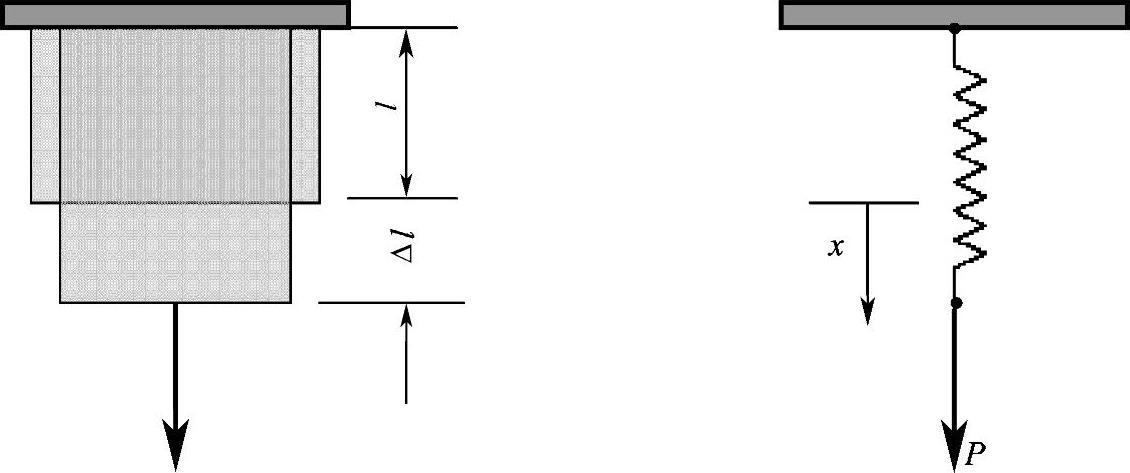
图2-3 受外力P作用的等截面杆
在弹性区域内,应力和应变服从胡克定律,根据胡克定律有
σ=Eε (2-4)
式中,E是材料的弹性模量。
联立式(2-2)、式(2-3)和式(2-4)并简化后,有

注意:式(2-4)和常用的弹簧方程F=kx很相似。因此,受轴向力作用的等截面杆可以看做是一个弹簧,其等价刚度为

注意,本例中杆件的截面面积在y方向上是变化的。作为一次近似,可以将杆看做是由4个弹簧串联起来的模型。根据式(2-4),在i和i+1节点处,单元的弹性特性可以由相应的弹簧模型描述,即有如下方程:

这里等价的弹簧单元的刚度由下式给出

式中,Ai和Ai+1分别是i和i+1处节点的横截面面积;l是单元的长度。
利用以上模型,假定力施加在各个节点上。图2-4描述了模型中节点1~节点5的受力情况。
静力平衡条件要求每个节点上的力的总和为零,这会产生如下5个方程:
节点1:R1-k1(u2-u1)=0
节点2:k1(u2-u1)-k2(u3-u2)=0
节点3:k2(u3-u2)-k3(u4-u3)=0 (2-9)
节点4:k3(u4-u3)-k4(u5-u4)=0
节点5:k4(u5-u4)-P=0
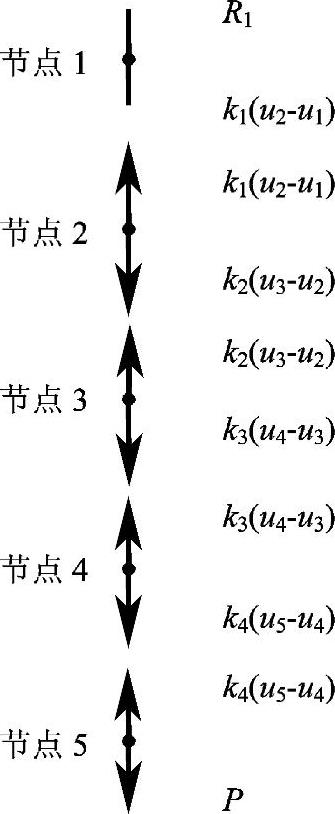
图2-4 节点受力图
把反作用力R1和外力P从内力中分离出来,重建方程组(2-9),得
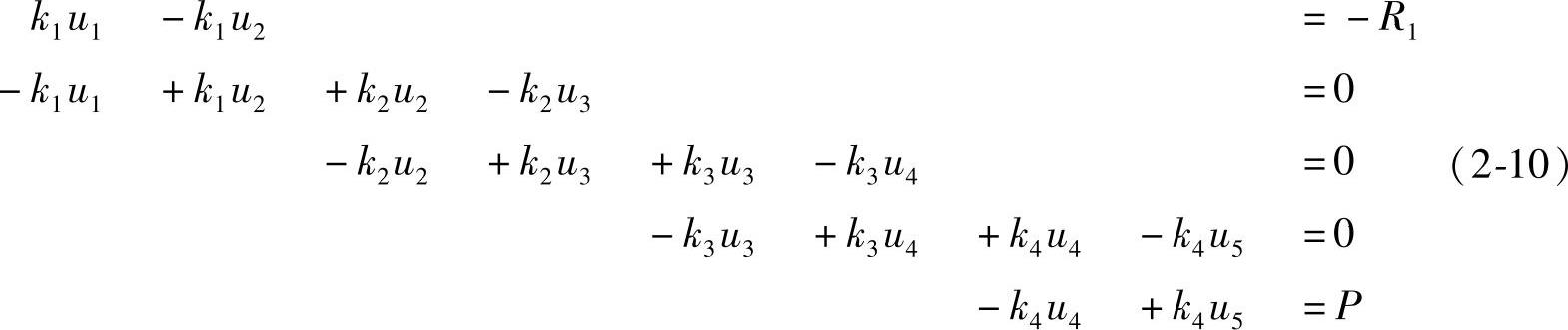
将以上方程组表示成为矩阵形式,有
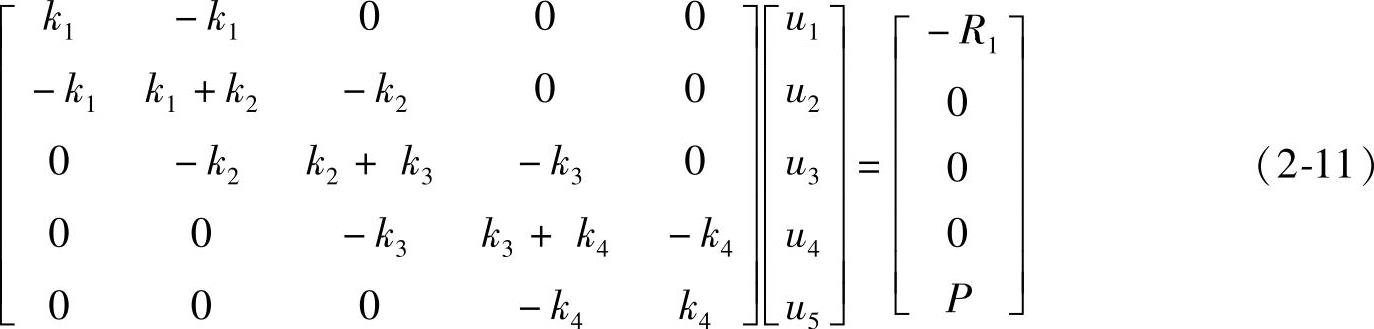
在带载矩阵中,将反作用力和外加的持载区分开便于求解。因此,与矩阵有关的方程组(2-11)可以写为:
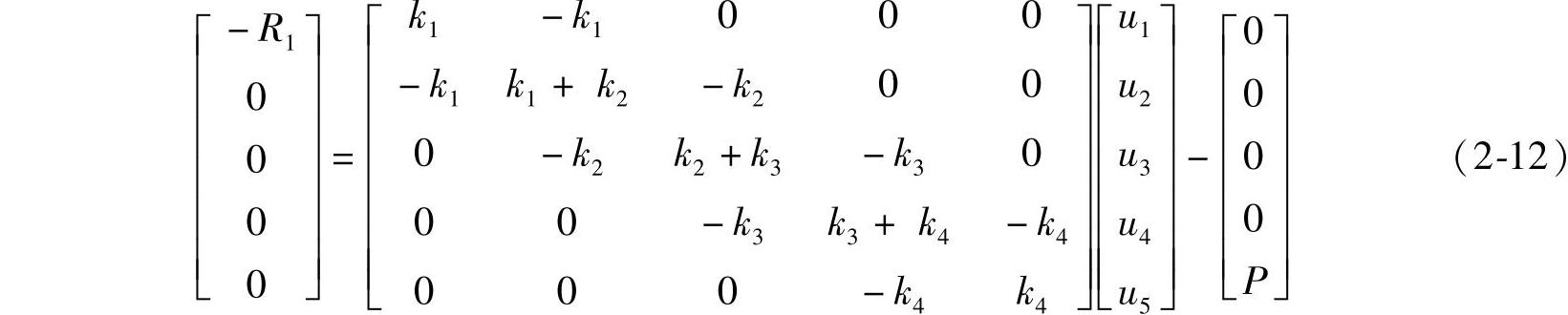
从式(2-12)可以很容易地看出,在节点载荷和其他边界条件下,方程组(2-11)给出的关系可以写成如下一般的形式:
R=ku-F (2-13)
即
[反作用力矩阵]=[刚度矩阵][位移矩阵]-[荷载矩阵]
在此,读者要注意外部施加的荷载矩阵F和反作用力矩阵R的区别。
在本例中,由于杆的上端是固定的,节点1的位移是零。因此,只有4个未知的节点位移u2、u3、u4和u5。节点1的反作用力R1也是未知的——总共有5个未知量。由于方程组(2-12)已给出了5个平衡方程式,因此能求出所有的未知数。不过需要注意的是,即使方程的数目和未知数的数目一致,系统方程也包含了两种不同类型的未知数——位移和反作用力。为了在求解时不同时考虑未知的反作用力和位移,而集中考虑未知的位移,可利用已知的边界条件取代系统方程组(2-12)的第一行,使u1=0。应用边界条件u1=0消除系统方程中未知的反作用力,使得到只有未知位移的方程,则有:
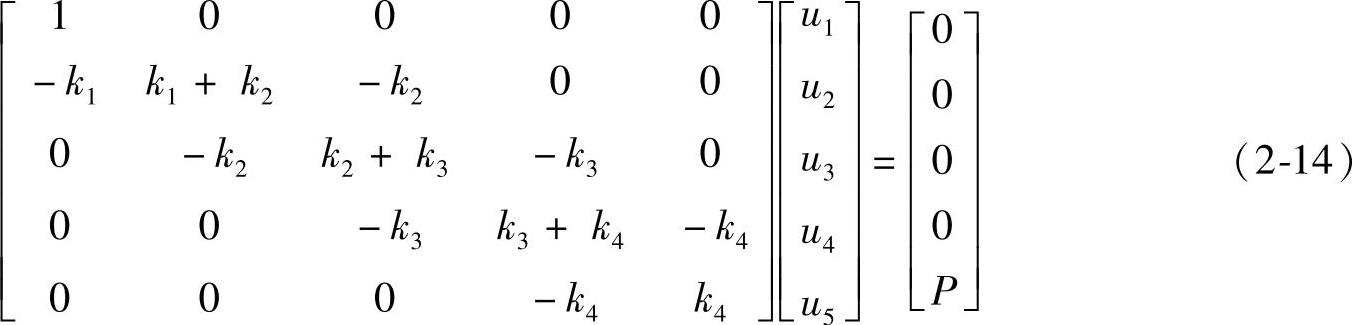
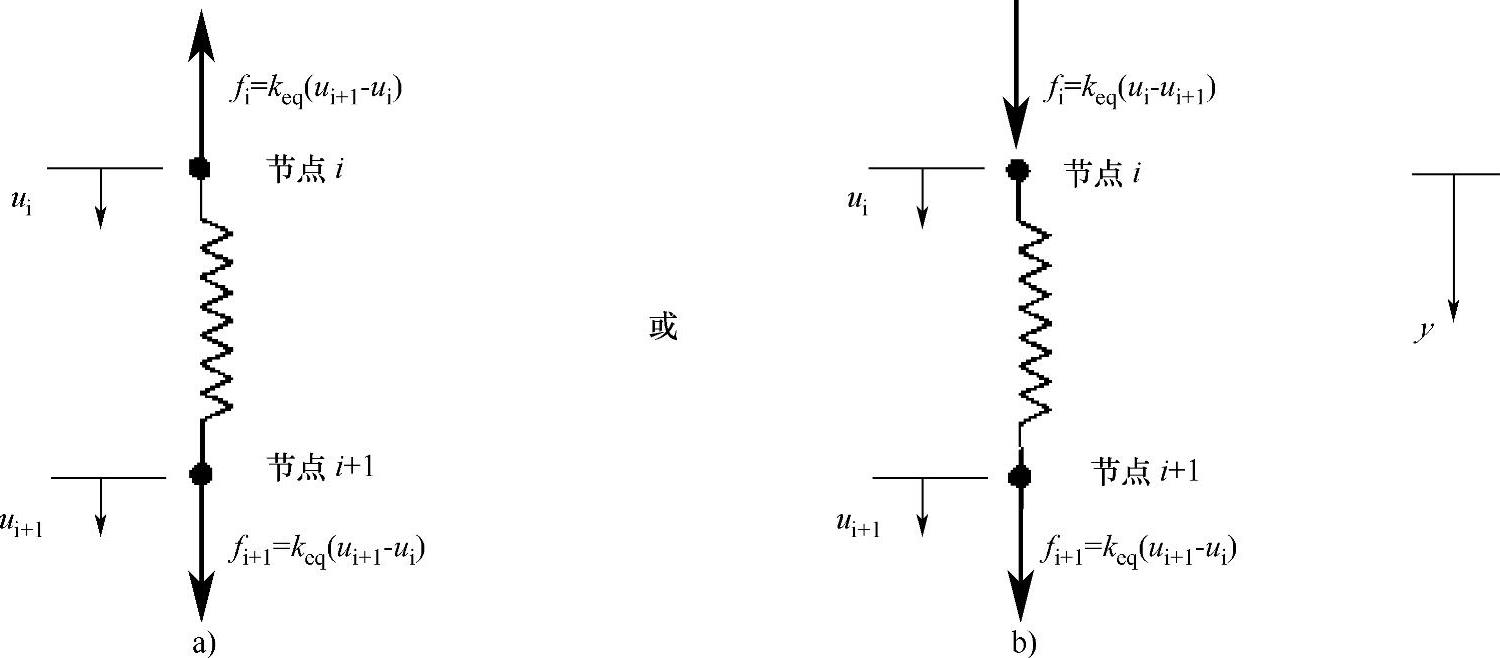
图2-5 任意单元中的内力
求解矩阵方程(2-14)就可以得到节点的位移。从以上的解释和对方程组(2-14)的观察,很清楚地知道,关于固体力学问题,只要在有限元公式中应用边界条件,就可以把给定的系统方程组(2-12)转变成一个一般的方程组形式(2-14)。这个由刚度矩阵、位移矩阵和荷载矩阵组成的一般形式,即
[刚度矩阵][位移矩阵]=[荷载矩阵]
通过上面的关系式求出节点位移后,就可以用方程组(2-13)求得反作用力。接下来,我们将建立单元刚度矩阵,并讨论总刚度矩阵的构成。
由于本例中每个单元有两个节点,每个节点有一个位移量,因而对每个单元需要建立两个方程。这些方程必然涉及节点的位移和单元的刚度。如图2-5所示,假设有单元的内力fi和fi+1,以及端节点的位移ui和ui+1。静力平衡条件要求fi和fi+1的和为零。注意,不管采用图中的哪种受力图,fi和fi+1的总和为零。不过,为保证以后讨论的连续性,这里采用图2-5b中给出的表示方法,即fi和fi+1的正方向相同。节点i和i+1上的载荷如式(12-15)所示。
fi=keq(ui-ui+1)fi+1=keq(ui+1-ui) (2-15)
将方程组(2-15)表示成矩阵形式,有

单元组装:将方程(2-16)描述的单元刚度方程应用到所有单元,并将它们组合起来(即放到一起)将得到总刚度矩阵。(https://www.xing528.com)
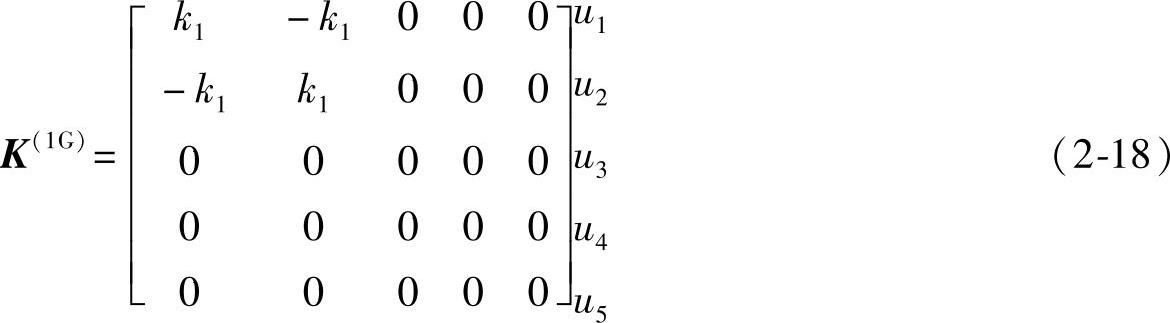
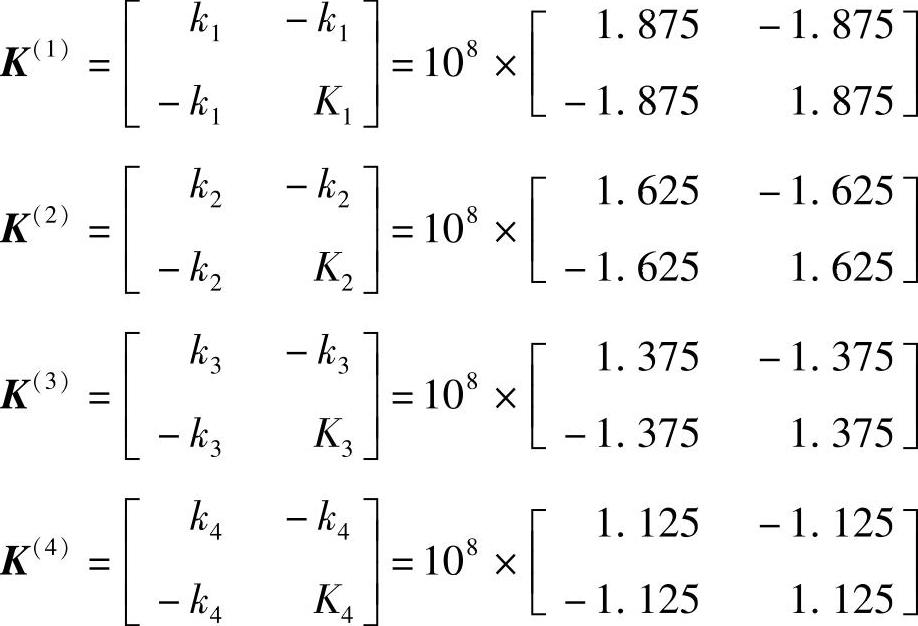
单元(1)的刚度矩阵为

单元(1)在总刚度矩阵中的位置如下:
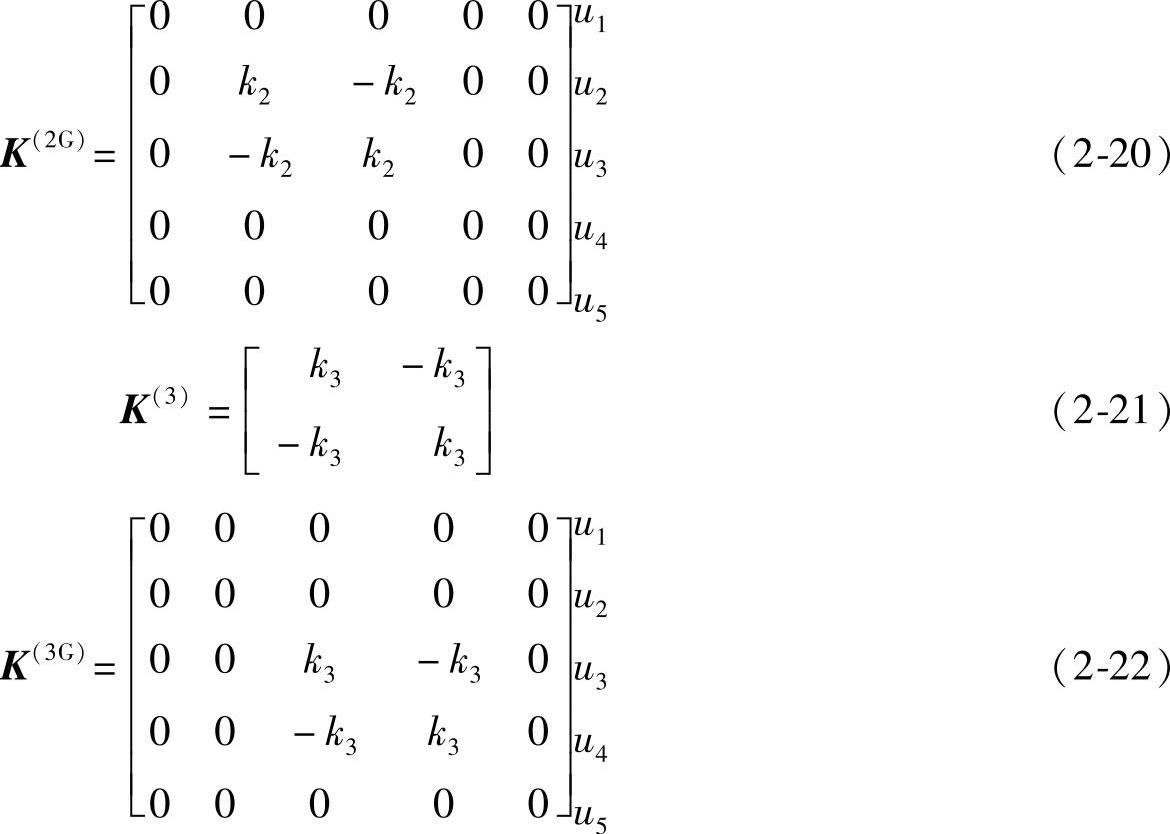
将节点位移矩阵放在总刚度矩阵中单元(1)的旁边,有助于观察节点对它的邻接单元的影响。类似地,对于单元(2)、单元(3)和单元(4),有

它在总刚度矩阵中的位置为
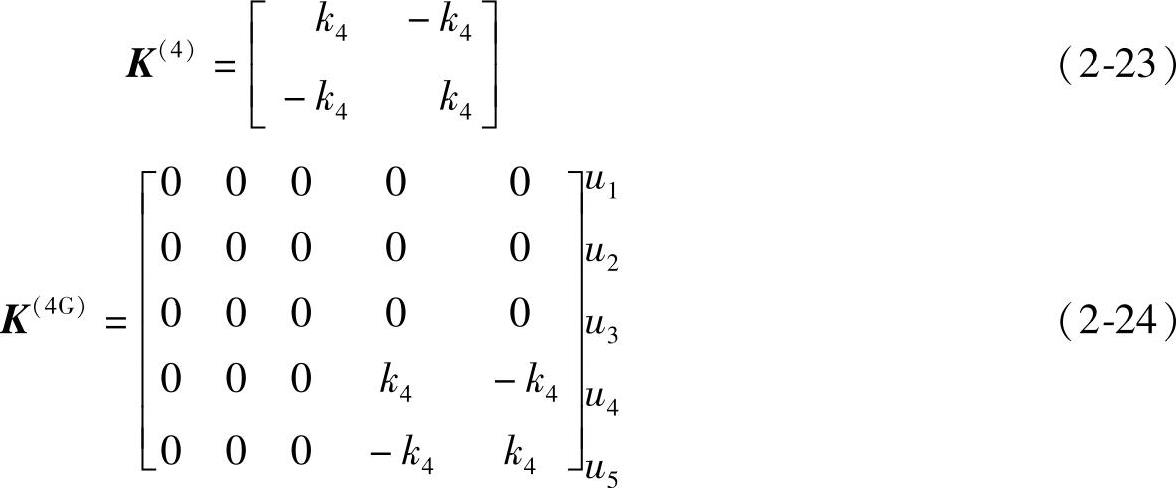
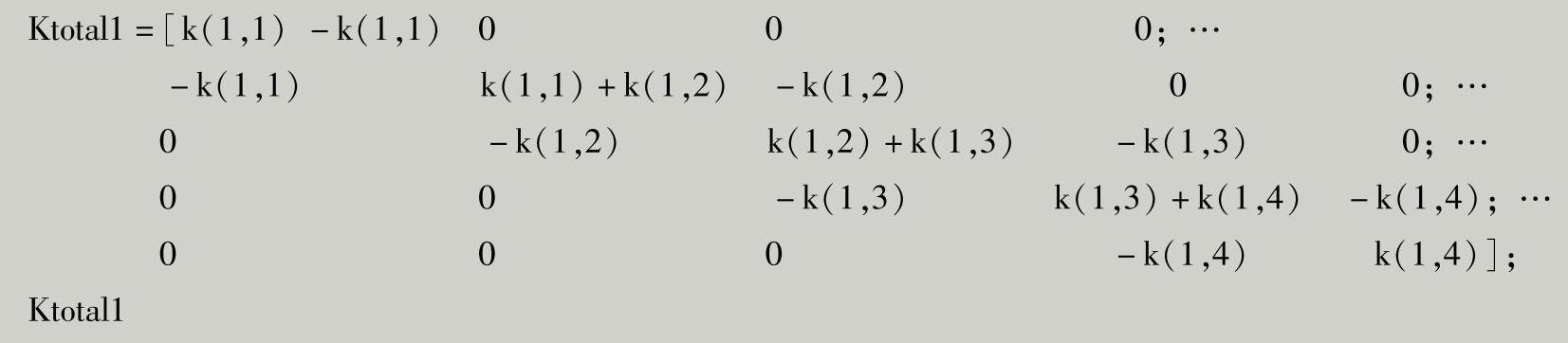
根据每个单元在总刚度矩阵中的位置将它们组合起来,即相加,就可以得到它们的最终总刚度矩阵。
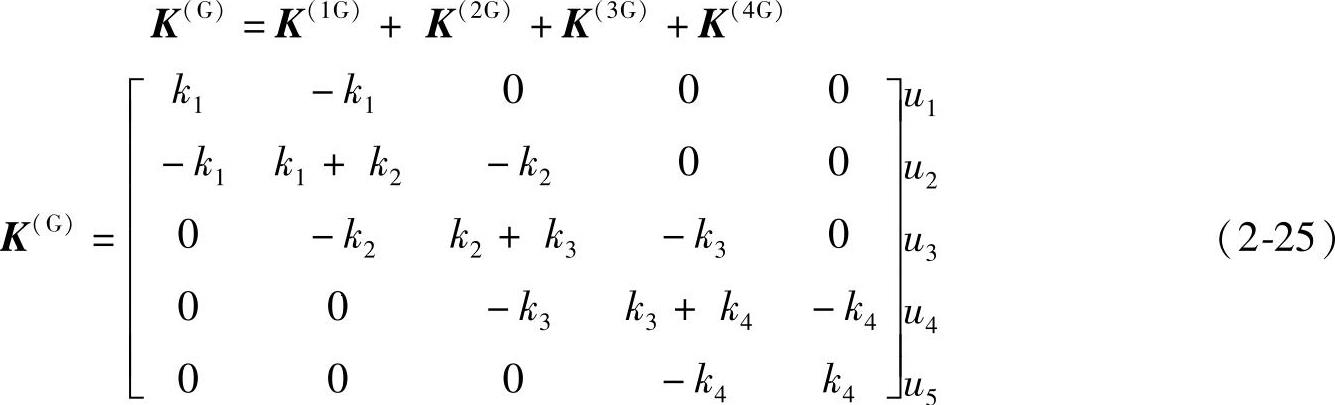
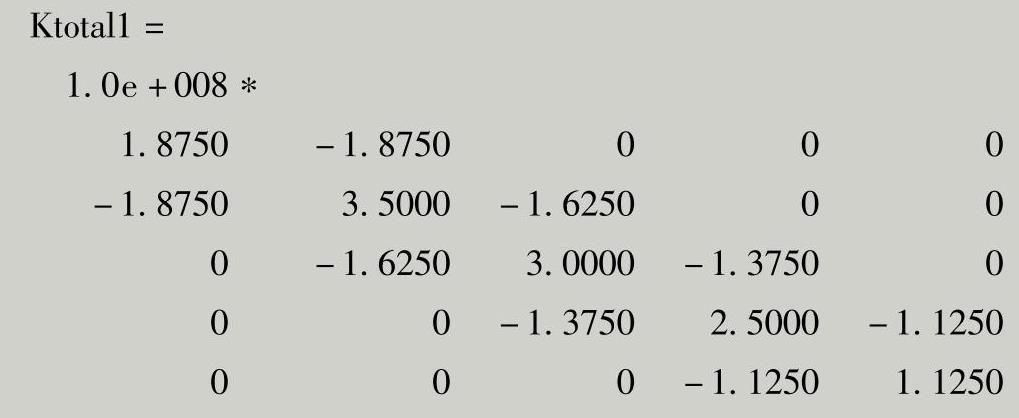
注意,由单元分析得到的总刚度矩阵如式(2-25)所示,与前面从分析所得到的总刚度矩阵,即方程(2-11)的左侧矩阵完全相同。
(4)应用边界条件和施加荷载
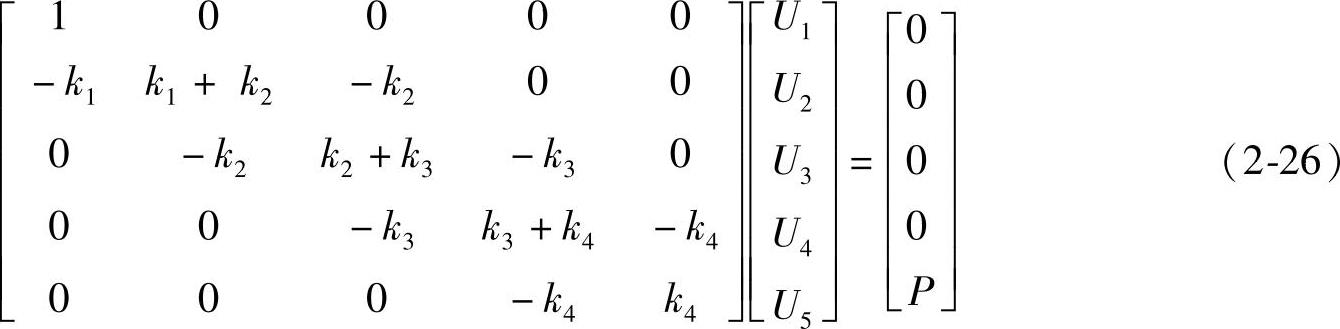
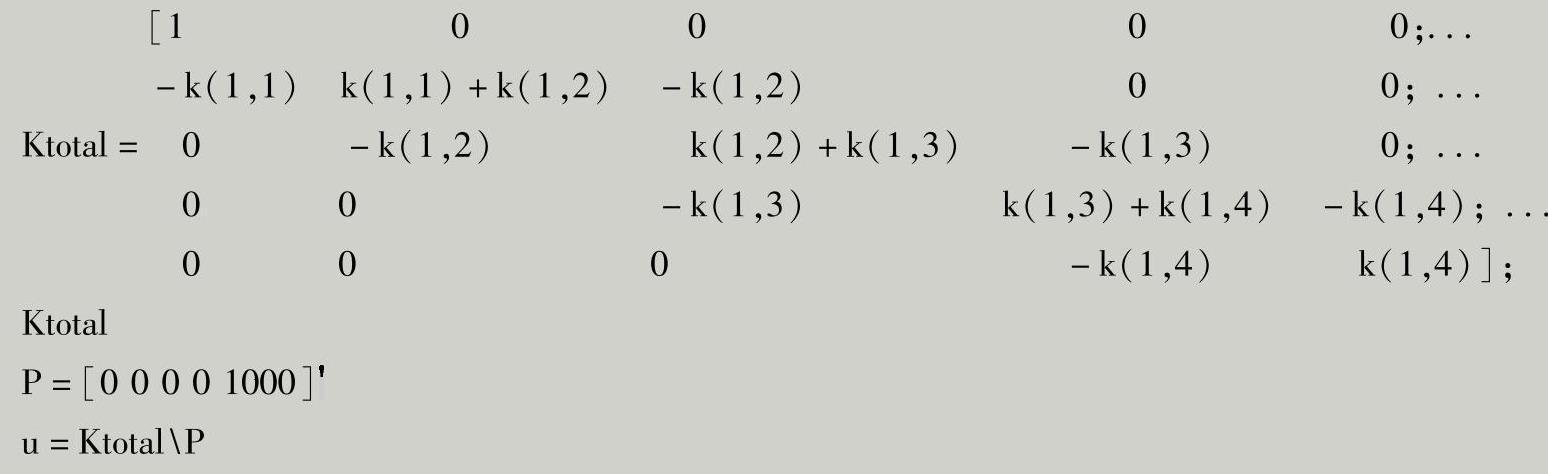
杆的顶端是固定的,即满足边界条件u1=0;在节点5处作用有外力P。应用这些条件会导出线性方程组(2-26)。
注意,方程(2-26)中矩阵的第一行必须含一个1,其后跟4个0,以满足给定的边界条件u1=0。如前所述,还要注意在固体力学问题中,有限元公式通常具有如下的一般形式:
[刚度矩阵][位移矩阵]=[荷载矩阵]
2.求解阶段
接下来联立求解代数方程组。为了得到节点的位移量,在此假定E=200GPa,w1=0.002m,w2=0.001m,t=0.00125m,L=0.10m,P=1000N。
杆在y方向横截面面积的变化可表示为:

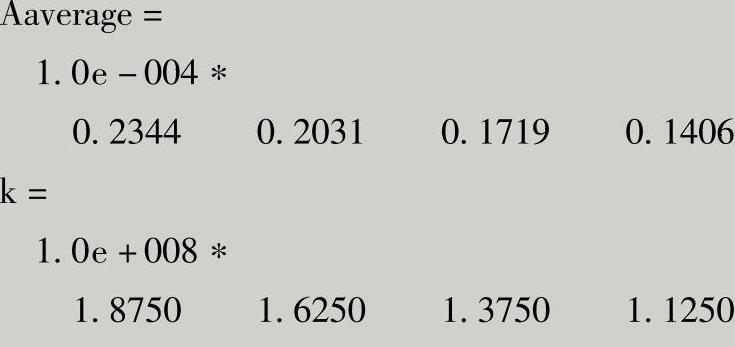
将上述参数输入Matlab,根据方程(2-27)可计算出每个节点处的横截面面积。输入Mat- lab中的源代码如下:
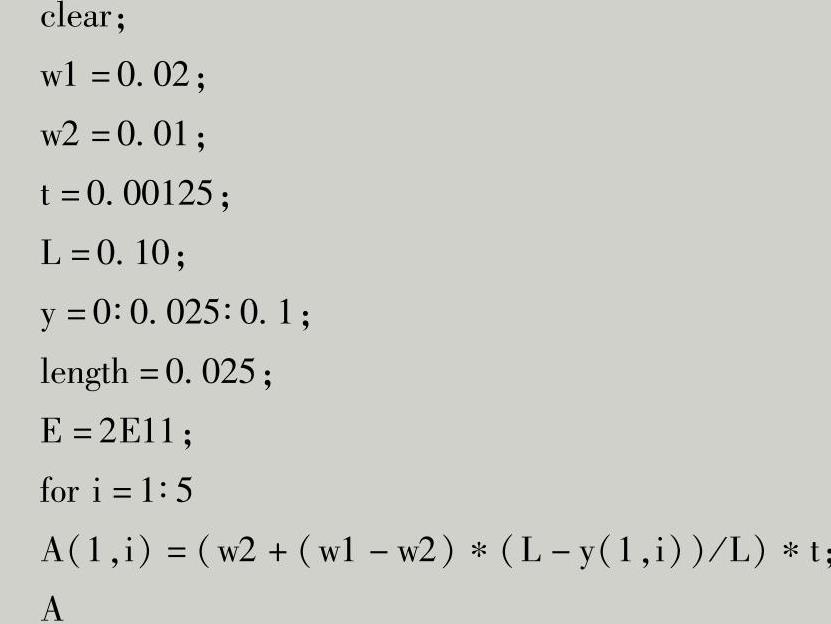
输出结果如下:

单元的平均横截面积采用下式进行计算:
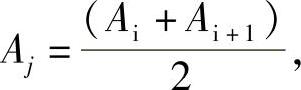
式中,j为单元编号,j=1,2,3,4;i为节点编号,i=1,2,3,4,5。
每个单元的等效刚度系数可由下式算出:
将上述公式输入Matlab,源代码如下:

输出结果如下:
单元刚度矩阵为:
按照式(2-25),将单元矩阵组合到一起所产生总刚度矩阵,Matlab源代码如下:
输出结果如下:
应用边界条件u1=0和荷载P=1000N,按照式(2-26),生成求解用总体刚度矩阵、荷条件P,并求解,Matlab源代码如下:
输出结果如下:
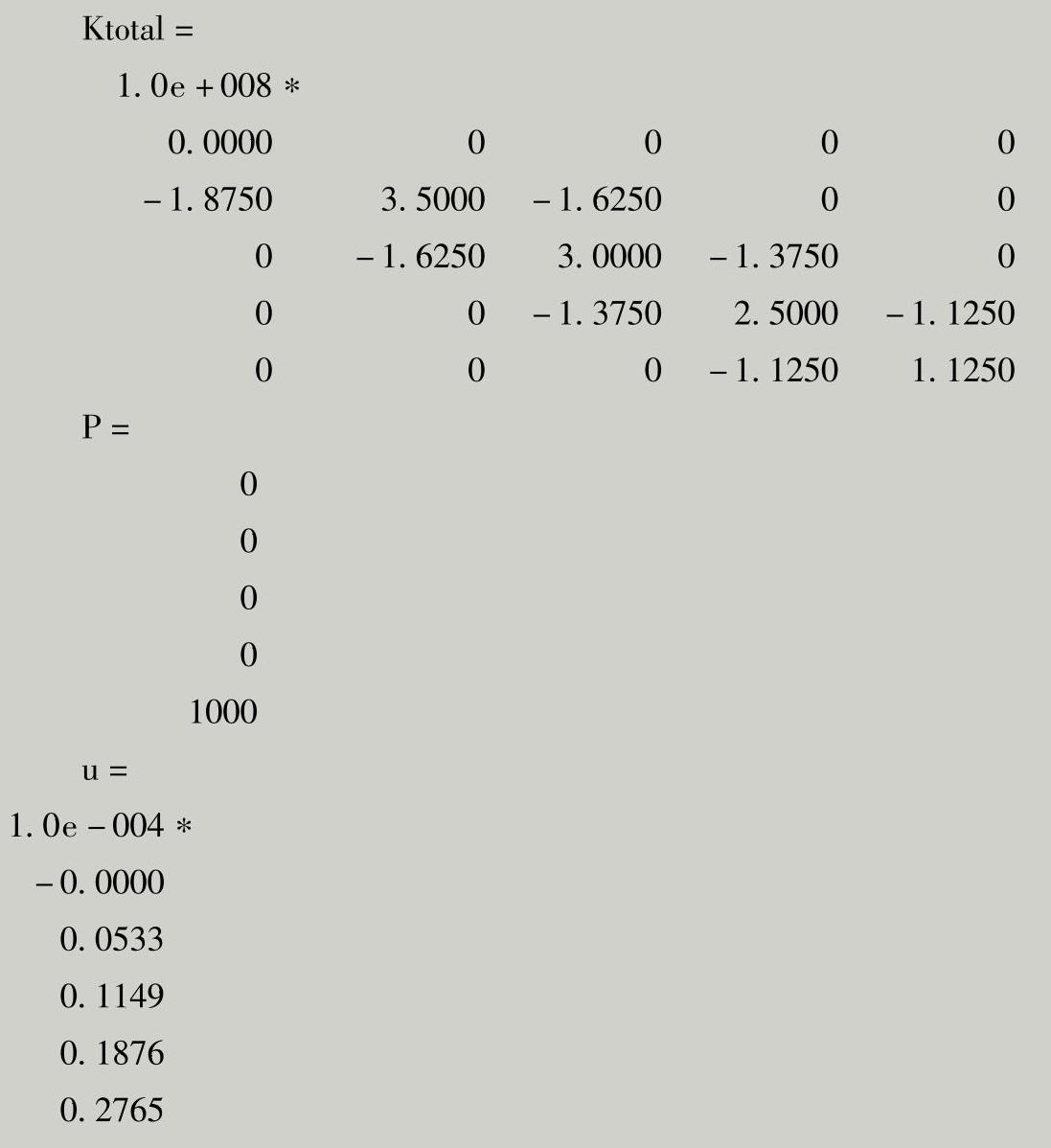
u是各节点最终的位移。
3.后处理阶段
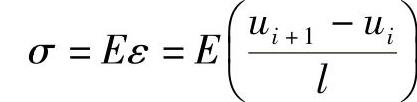
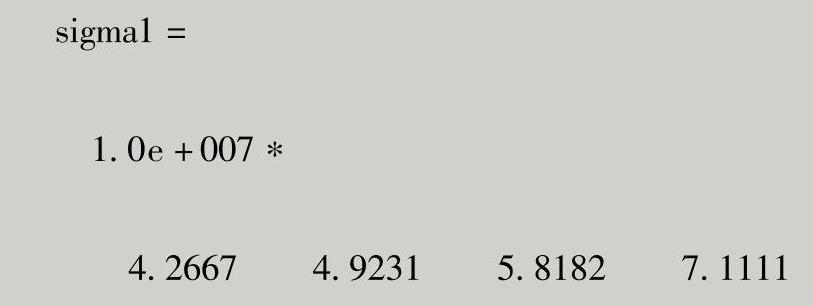
在本例中,我们可能对其他信息,如每个单元的平均应力等感兴趣。这些值可以由如下方程确定:

由于不同节点的位移已知,还可以直接从应力和应变的关系中得到应力:
按照上述公式,输入Matlab源代码如下:
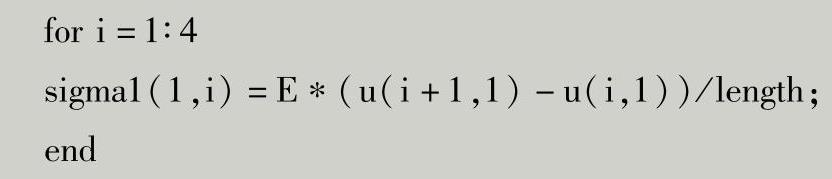
得到不同单元的平均应力如下:
注意到对于给定的问题,无论在何处将杆截断,截面的内力f均是1000N。

按照上述公式,输入Matlab源代码如下:
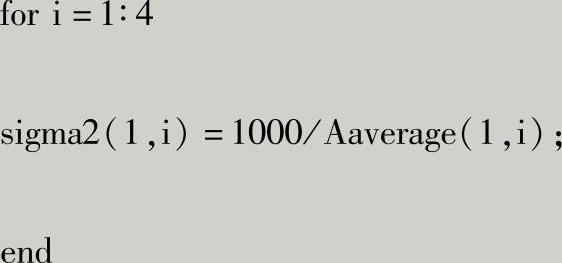
得到不同单元的平均应力如下:
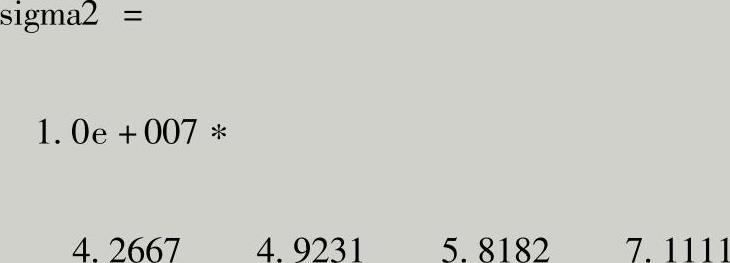
我们发现这些结果和从位移信息计算的单元应力是完全相同的。经比较,就本问题而言,位移和应力的计算是正确的。上述Matlab源代码可在随书光盘中找到,以供有兴趣的读者调试使用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。