



数控车床系统种类很多,典型的有广州的GSK928TA、GSK980T系统,日本的FANUC系统等。不同的数控车床系统,其系统间主要区别在于G功能指令的差异,而M、S、F、T功能指令基本一致。所以,我们着重讲述GSFT功能以及常用的G功能指令等。
1.M指令
(1)程序结束指令M02
M02为程序结束指令,一般放在主程序的最后一个程序段中。执行M02指令时,机床的主轴、进给、冷却液全部停止,加工结束。
(2)程序结束并返回到程序起点指令M30
M30与M02功能基本相同,只是M30指令还兼有使数控系统返回到程序源头的作用。使用M30结束程序后,若要重新执行该程序,只需再次按操作面板上的“循环启动”键。
(3)程序暂停指令M00
当数控系统执行到M00指令时,停止程序的自动运行,此时与单段程序运行相同。数控系统把前面的模态信息全部保存起来,用以停止主轴、冷却液,并停止做进一步的处理。暂停时,可以方便操作者进行刀具和工件的测量、工件调头、手动变速等。按“循环启动”按钮,数控系统自动运行后续程序。
(4)选择暂停指令M01
M01与M00功能相同。只是M01功能是否执行,由机床操作面板上的“选择暂停”开关控制。当选择暂停开关处于“ON”状态时,M01指令起作用,程序暂停。若“选择暂停”开关处于“OFF”状态时,则M01指令在程序中不起作用。
(5)控制主轴旋转的M代码
这一组M代码有M03、M04、M05。
M03启动主轴正转;M04启动主轴反转;M05停止主轴转动。主轴正转的方向是按标准为右手螺旋进入工件的方向。从主轴前端部看过去,主轴旋转为逆时针方向。不论主轴是在正转还是在反转,执行M05都能使主轴停止转动。
(6)控制冷却液开关的M代码
这一组M代码有M07、M08、M09。
M07开2号冷却液;M08开1号冷却液;M09关闭液却液。不论是1号冷却液还是2号冷却液开,执行M09都能使冷却液关闭。
(7)自动换刀M代码
M06为自动换刀代码。在多刀加工的数控机床上,执行M06,机床实现自动换刀。即主轴停转,刀具离开工件到达换刀点后按加工要求自动换刀,然后启动主轴,程序顺序往下执行。
2.S指令
S指令为主轴转速控制指令。有两种指令格式:
一种是S**,用S和其后的两位数选择主轴速度。这个两位数是主轴转速的编码,不同编码表示主轴不同的转速级。如S12为主轴的第十二级转速。此时,机床主传动为有级变速。
另一种是S****,用S和其后的四位数表示指令主轴的转速。如S2000为指令主轴转速为2000r/min,此时,机床主传动为无级变速。
指令了S代码后,主轴转与不转,是正转还是反转,转后是否停止,由控制主轴旋转的M代码决定。在刀具旋转的机床中,主轴旋转单位一般采用r/min,但在工件旋转的机床中,可以采用mm/min,此时为恒线速度控制。
S指令是模态指令,S指令只有在主轴速度可调时有效。
模态指令又称为续效指令。这类指令一旦在程序段中使用,便一直有效,直到在后面的程序段中出现同组另一指令(G指令)或被其他指令取消(M指令)时才失效。与上段程序的模态指令相同时,下段程序中的同一模态指令可省略不写。不同组模态指令编在同一程序段中,不影响其续效。非模态指令仅在其使用的程序段中有效。
S指令所编程的主轴转速可以借助机床控制两极上的主轴面板开关进行修调。所谓修调,就是主轴的实际转速按S指令所指令的转速的百分比变动。
3.T指令
T指令为选择刀具指令。指令格式:T****。
该指令与本书前面的应用相同,此处将不再赘述。
4.F指令
F指令表示工件被加工时,刀具相对于工件的合成进给速度。指令格式:F**或F****。F的单位取决于G94(每分钟进给量mm/min,用F****指令)或G95(主轴每转一转刀具的进给量mm/r,用F**指令)。
5.G指令
(1)英制/米制单位设定指令G20、G21
G20:编程时使用的单位为英制单位;
G21:编程时使用的单位为米制单位。
(2)切削进给速度单位设定指令G94、G95
指令格式:G94[F];
G95[F]。
指令G94的功能是:刀具每分钟的进给速度。用F代码和后面的四位数直接指令刀具每分钟的进给量。
指令G95的功能是:刀具每转的进给速度。用F代码和后面的两位数表示指令主轴每转的进给量。使用指令G95,主轴上必须安装位置编码器。如果机床不具备车削功能,一般只用G94。
每分钟进给速率(G94)的倍率,可以用机床操作面板上的进给倍率开关调整。
(3)恒线速度设定G96、G97
指令格式:G96S;
G97S。
G96的功能为设定切削的线速度为恒定值。G96后面的S值为切削的恒定线速度,单位为mm/min。G97的功能之一为取消恒线速度切削,并用S值来指定主轴取消恒线速度切削后的转速,单位为r/min。若G97后无S值,则执行指令G97后,主轴转速回复到执行G96指令前的转速。
注意:在使用恒线速度功能时,主轴必须能自动变速。同时在系统参数中要设定主轴的最高限速。
(4)数控车床的坐标系统
①机床的坐标轴
数控车床一般是以平行机床主轴线方向为Z轴方向,刀具远离工件的方向为Z轴的正方向。X轴位于与工件安装面相平行的平面内,并与工件旋转轴线的方向垂直。规定刀具远离主轴轴线的方向为X轴的正方向。
②机床原点、参考点及机床坐标系
机床原点为机床上的一个固定点。车床的机床原点一般是指主轴旋转中心线与卡盘前端面的交点,在图4-5中,O点即为机床原点。
参考点也是机床上的一个固定点。该点与机床原点的相对位置如图4-5所示,O′即为参考点,其位置由设置在机床X向、Z向滑板上的机械挡块来确定。当刀架返回到机床参考点时,装在X向和Z向滑板上的两机械挡块分别压下对应的开关,并向数控装置发出信号,停止刀架滑板运动,即完成了“回参考点”的操作。
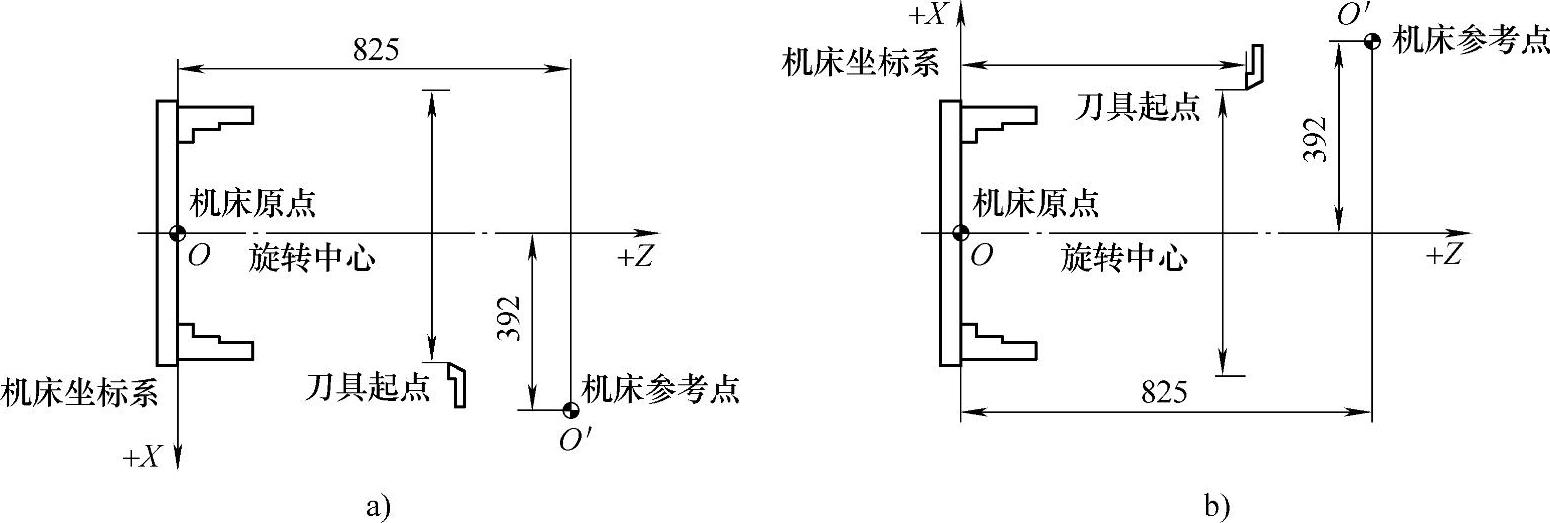
图4-5 数控车床坐标系及坐标原点
如果以机床原点为坐标原点,建立一个Z轴与X轴的直角坐标系,则此坐标系就称为机床坐标系。
机床坐标系一般有两种形式:
1)当刀架前置时,X轴的正方向朝下建立,如图4-5a所示,适用于水平床身卧式数控车床;
2)当刀架后置时,X轴的正方向朝上建立,如图4-5b所示,适用于斜床身和水平床身斜滑板(斜导轨)的卧式数控车床。
有些类型的数控车床在开机时,刀架返回参考点之前,不论刀架处于什么位置,此时操作面板显示屏上显示的X、Z坐标值均为0。因此,必须使刀架返回机床参考点,这一过程称为“回参考点”或“回零”。只有进行“回参考点”的操作后,车床才建立起机床坐标系,车刀移动才有了依据,否则,不仅编程无基准,还可能发生碰撞等事故。
③工件原点与工件坐标系
在编制加工程序时,为使编程方便,常取零件图样上一设计基准点或工艺基准点作为编制零件程序的原点,该基准点称为工件原点或编程原点。
以工件原点为坐标原点建立一个X轴与Z轴直角坐标系,称为工件坐标系。数控车床工件原点一般都设在主轴中心线与工件左端面或右端面的交点处,如图4-6所示。在实际操作中,一般通过对刀或采用设置浮动坐标系的方法来实现工件坐标系及其原点的建立。
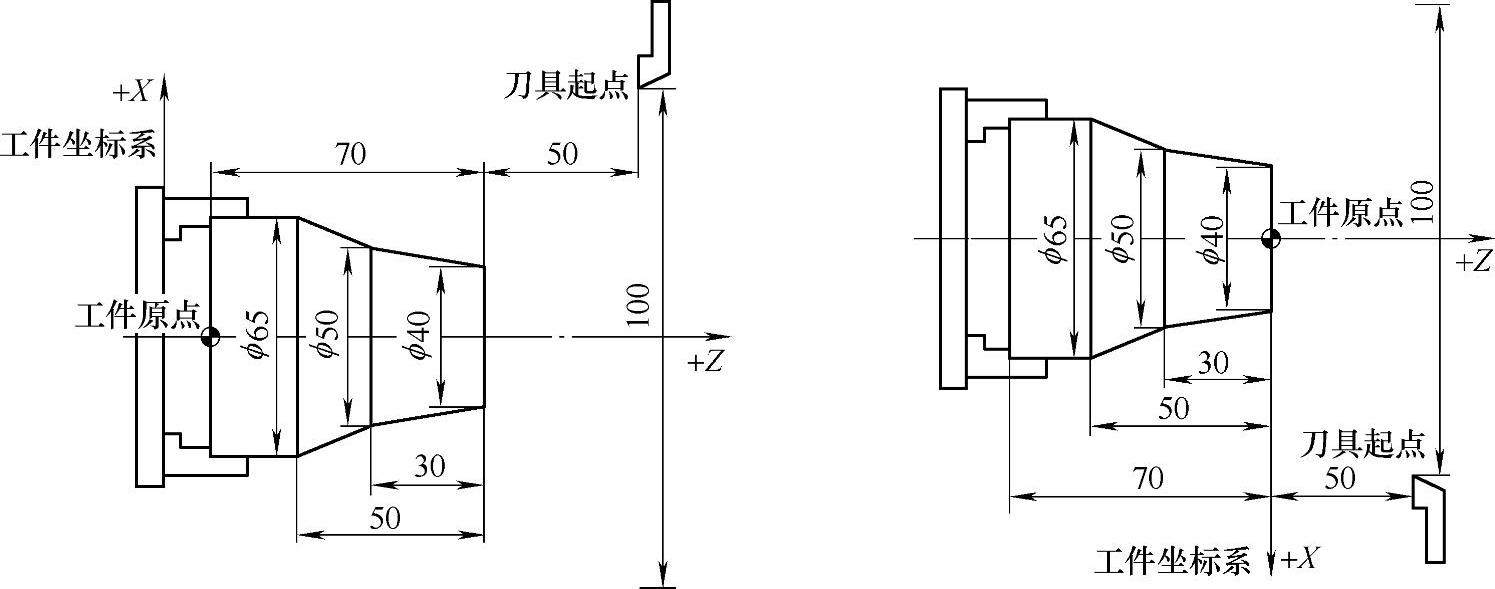
图4-6 工件坐标系及工件原点设置
④绝对坐标与增量坐标
刀具运动轨迹的坐标值均以某一固定原点而标注的坐标称为绝对坐标,用X、Z表示。
如图4-7中的A点(X10,Z10),B点(X50,Z60);而运动轨迹的坐标值是以相对前一位置来计算时,即称为增量(相对)坐标,分别用U、W表示X、Z方向的增量坐标。如图4-7中的B点相对于A点的增量坐标为(U40,W50),而A点相对于B点的增量坐标为(U40,W50)。
⑤直径编程与半径编程
编制轴类零件的加工程序时,因其横截面为圆形,所以工件的径向尺寸有直径指定和半径指定两种方法。
当刀尖的X坐标值标注为刀尖到工件中心线距离的2倍时,称为直径编程,其输入格式为Xϕ。

图4-7 绝对坐标与增量坐标
当刀尖的X坐标值等于刀尖到工件中心线的距离时,称为半径编程,其输入格式为XR。
在数控系统中,直径编程一般为系统初态(开机时的状态),若使用半径编程,需要设置相关指令将系统改为半径编程状态。
(5)坐标系设定指令
加工零件的编程是在工件坐标系内进行的。因此,设定工件坐标系对编程有着极其重要
的作用。工件坐标系可用下述两种方法设定。
①工件坐标系设定指令G92
指令格式:G92X Z。
使用G92指令,先要在工件上选定一个特殊点作为工件坐标系的原点。同时还要在工件外选定一个特殊点作为刀具在加工时的快速靠近工件的终止点(又称为对刀点或程序原点)。G92指令后面的X、Z值为对刀点到工件坐标系原点的有向距离。出于工件坐标系的原点一旦选定后是不能改变的,因此,在执行G92指令之前,应通过对刀,确定对刀点。
只有确定了对刀点,才确定了工件坐标系的原点。G92指令的功能就是建立工件坐标系的原点到刀具的对刀点之间的联系。在执行G92指令时,若刀具当前点不在对刀点上,则加工原点与程序原点不重合,加工出的产品就有误差或报废,甚至可能出现危险。
【例4-1】坐标系的设定如图4-8所示,当以工件左端面中心点为工件坐标系原点,对刀点在图示位置时,工件坐标系设定指令为G92 X227 Z371;当以工件右端面中心点为工件坐标系原点时,工件坐标系设定指令为G92 X227 Z71。显然,若刀具不在对刀点上,则会发生工件坐标系的移动,因此,在执行G92 X Z前必须先对刀。
G92指令中的X、Z值一旦确定,即确定了对刀点在工件坐标系下的坐标值。
注意:执行G92指令时,刀具不产生移动。
②工件坐标系选择指令G54~G59
指令格式:G54
G55
G56
G57
G58
G59
G54~G59为六个工件坐标系,如图4-9所示。
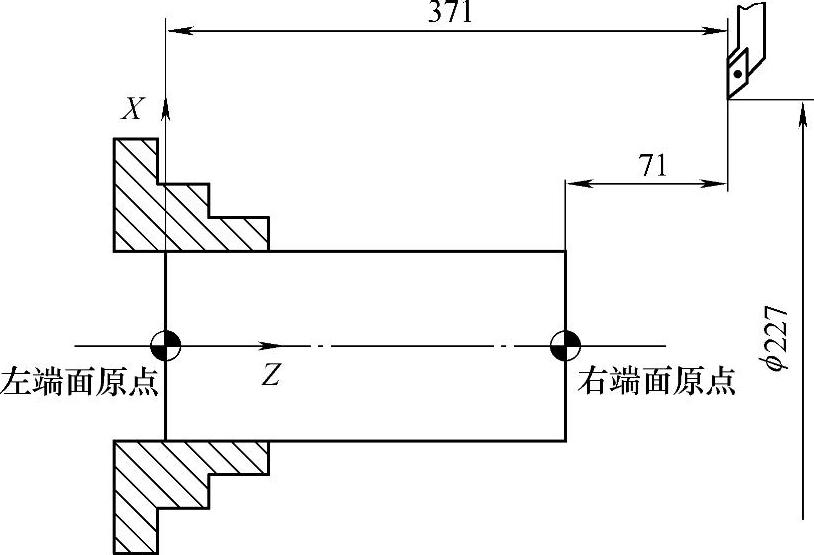
图4-8 工件坐标系G92
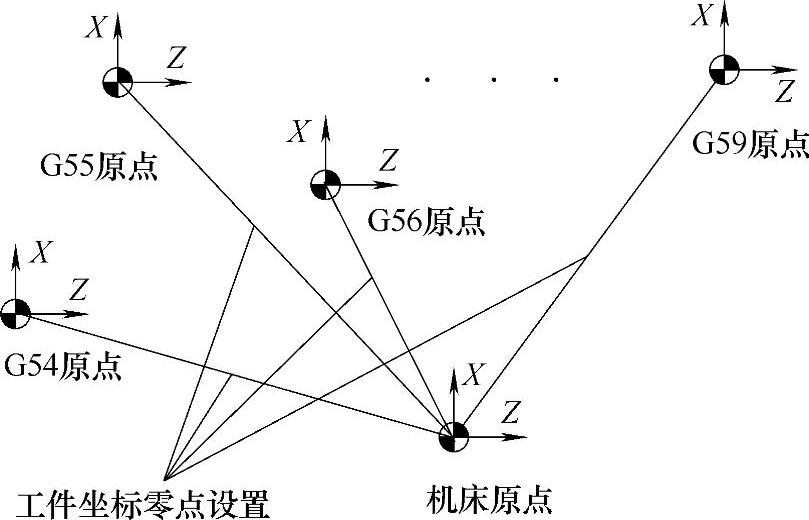
图4-9 工件坐标系G54~G59
每个工件坐标系的原点是在加工工件上选择的特殊点。各个工件坐标系原点的值,是机床坐标系中机床原点到各个工件坐标系原点的有向距离。这六个工件坐标系的原点在机床坐标系上的坐标值可用MDI方式输入,数控系统自动记忆。例如:选择G54作为工件坐标系,编程时用指令G54,而G54坐标系原点的值在编程时可以不考虑,加工时先在工件上选择一个特殊点作为工件坐标系的原点,然后通过对刀,用MDI方式将这个特殊点的值输入到数控系统中。
在G54~G59中,工件坐标系一旦选定,工件上各点的值均通过工件坐标系原点与机床坐标系建立起联系,程序与工件的位置无关,也与刀具的位置无关。更换工件时可省去重复对刀,也不需要修改程序。
③机床坐标系编程指令G53
G53是机床坐标系编程指令,在含有G53的程序段中,绝对值编程时的指令值是在机床坐标系中的坐标值。也就是把工件各点的值取为机床坐标系中的坐标值。用一个机床坐标系来编程和加工。
④坐标值编程G指令
1)绝对值编程G90与相对值编程G91。
指令格式:G90X Z
G91X Z

图4-10 绝对值编程G90和相对值编程G91
绝对值编程指令G90后面的程序段中的编程值,都是相对于工件坐标系原点的编程坐标轴上的坐标值。用该坐标轴和其后的坐标值表示,如X30、Z50等。
相对值编程指令G91后面的程序段中的编程值,都是当前编程点相对于前一个编程点的编程坐标轴上的增值量,X、Z的相对坐标值也可以用U、W来表达,但在固定循环指令中不要采用U、W这种相对坐标值表达方式,如图4-10所示。
【例4-2】绝对值编程G90与相对值编程G91:在图4-10中A、B、C、D各点的坐标值编程见表4-1。
表4-1 坐标值编程

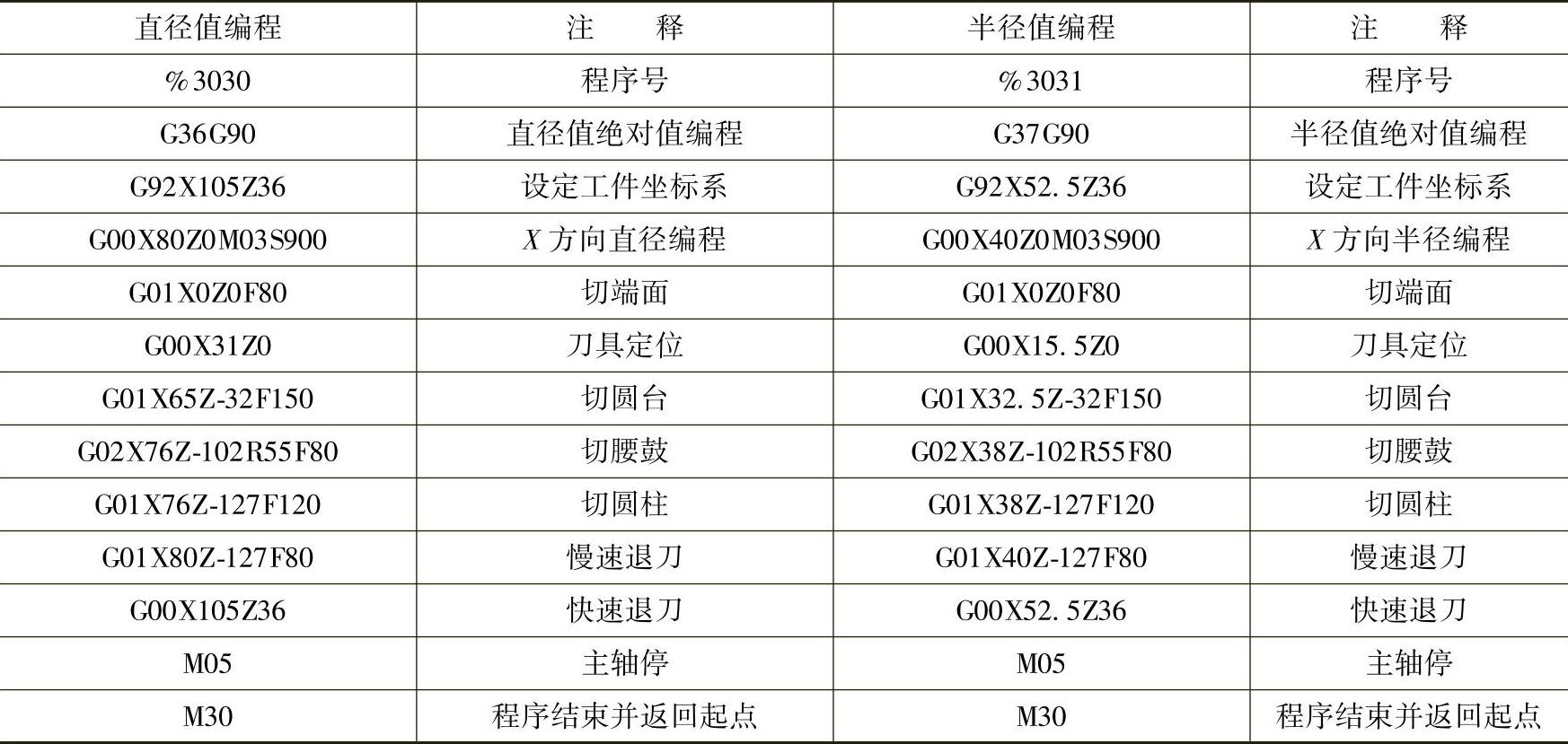
2)直径方式编程G36与半径方式编程G37。
指令格式:G36
G37
数控车床的工件外形通常是旋转体,其径向尺寸为X轴尺寸,可以用两种方式编程,即:G36为直径方式编程,在G36后面的程序段中的X值均为零件的直径值。G37为半径方式编程,在G37后面的程序段中的X值均为零件的半径值,如图4-11所示,G36与G37编程详细解释见表4-2。
表4-2 直径方式编程G36与半径方式编程G37
(6)刀具定位G指令
①快速定位指令G00
指令格式:G00X(U)Z(W)
G00指令用于刀具快速定位。执行G00指令,刀具以数控系统默认的快速进给的速度移动到指令中X(U)、Z(W)值指定的位置。由于是快速,故只用于刀具的空行程。它的移动轨迹可以是直线,各坐标也可以按各自的快速进给速度移动,这时合成的轨迹通常为折线。

图4-11 直径方式编程G36与半径方式编程G37
G00指令着眼于刀具快速移动后的刀具绝对或增量指定位置,对于刀具在快速移动前的位置没有要求,因此,在使用G00指令时,要防止刀具在移动过程中与工件发生碰撞。(https://www.xing528.com)
G00指令中的快速移动速度由机床参数对各轴分别设定,不能用F规定。
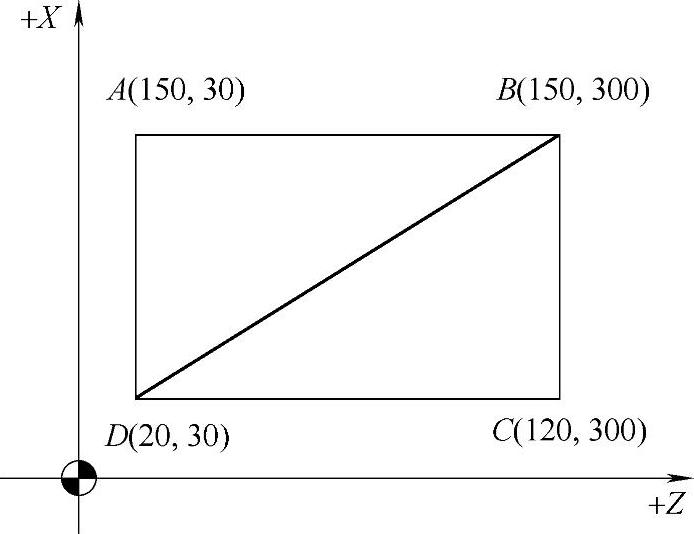
图4-12 G00编程
G00指令一般见于加工前的快速定位或加工后的快速退刀。
【例4-3】G00编程:如图4-12所示。
指令刀具快速到达D点程序段:
G90 G00 X20 Z30
指令刀具快速到达B点程序段:
G90 G00 X150 Z300
刀具由D点运动到B点的轨迹并非直线DB,原因在于:在执行G00指令时,各轴以各自的速度在快速移动,哪个轴先到达目标点,哪个轴就先停止,其他轴继续运动直至到达目标点。由于各轴的移动距离不同,不能保证各个轴同时到达目标点,所以联动轴的合成轨迹不一定是直线。
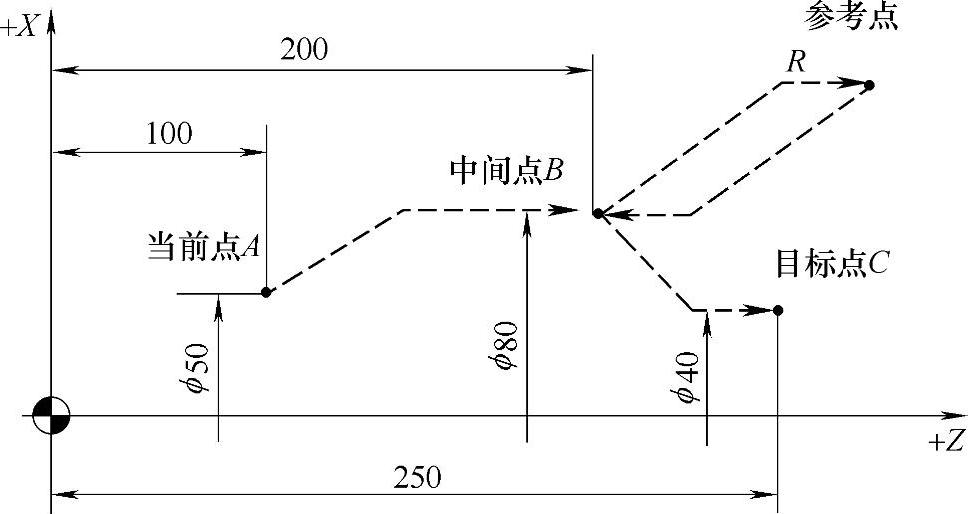
图4-13 G28、G29指令动作
②刀具自动返回参考点指令G28
指令格式:G28 X(U)Z(W)
G28指令中的X(U)、Z(W)值是选定的中间点在工件坐标系中的值。可以用绝对值指令或增量值指令,被指令的中间点坐标存储在数控系统的存储器中。编程时的中间点一般是换刀点,而参考点则是机床的坐标原点。
G28指令的动作如图4-13所示。
G28指令的轴,从A点以快速进给速度定位到中间点B,即动作①,然后再以快速进给进度定位到参考点R,即动作②。如果没有机械锁紧,该轴的参考点返回指示灯亮。不指令的轴不执行返回参考点的操作。
这个指令一般在换刀时使用,在执行该指令之前应取消刀尖半径补偿。
在G28的程序段中不仅产生坐标轴的移动指令,而且记忆了中间点B的坐标值。电源接通后,在没有手动返回参考点的状态下,指定G28,从中间点自动返回参考点,与手动返回参考点相同。这时从中间点到参考点的方向就是机床参数“回参考点方向”。G28指令在其规定的程序段中有效。
③自动从参考点返回指令G29
指令格式:G29X(U)Z(W)
G29指令中的X(U)、Z(W)值处选定的目标点在工件坐标系中的值,可以用绝对值指令或增量值指令,通常该指令紧跟在G28指令之后。
G29指令执行时,刀具从参考点R出发,快速到达G28指令的中间点B定位,然后到达G29指令的目标点C定位。
目标点若为增量值指令,其值为从中间点到目标点的增量值间点到参考点的移动量。
目标点一般选择在下段程序的对刀点。
【例4-4】用G28、G29指令对如图4-13所示的路径编程:要求由A经过中间点B并返回参考点R,然后暂停4s再从参考点经中间点B运动到C。
参考程序如下:
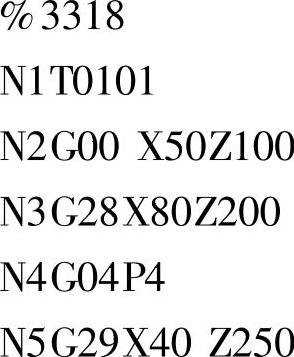
N6G00X50 Z100
N7M30
(7)直线切削指令G01
指令格式:G01 X(U)Z(W)F
G01指令中的X(U)、Z(W)值是直线切削终点的值。用绝对值编程时是直线切削终点在工件坐标系中的坐标值;用增量值编程时是直线切削终点相对于直线切削起点的增量值。F为合成进给速度。

图4-14 G01编程图例
G01指令刀具以联动的方式,按F规定的合成进给速度,从当前位置按直线路径切削到程序段指令的终点位置。如果没有指令进给速度,就认为进给速度为零。故在G01指令中,F参数是必须要有的。
【例4-5】G01编程图例如图4-14所示。
①绝对值编程
选取工件右端面中心点为工件坐标系原点(精加工程序),参考程序如下:
②增量值编程
选取工件右端面中心点为工件坐标系原点(精加工程序),参考程序如下:

注:增量值编程的X坐标增量也可以用U表示;增量值编程的Z坐标增量也可以用W表示。
③混合编程
选取工件右端面中心点为工件坐标系原点(精加工程序),参考程序如下:
注:在混合编程中的绝对坐标用X、Z,增量坐标用U、W。
(8)圆弧切削指令G02、G03
指令格式:G02X(U) Z(W)I K F
G02X(U) Z(W)R F
G03X(U) Z(W)I K F
G03X(U) Z(W)R F
①切削方向
G02顺时针圆弧切削方向;
G03逆时针圆弧切削方向。
切削方向的判别方法是:从与坐标平面垂直的轴的正方向向负方向看,坐标平面上的圆弧从起点到终点的移动方向是顺时针方向还是逆时针方向,如图4-15所示。

图4-15 顺时针/逆时针圆弧
对于上位刀(后置刀架),Y轴的正向(■方向)指向操作者,圆弧从起点到终点是顺时针时,用G02编程;圆弧从起点到终点是逆时针时,用G03编程。
对于下位刀(前置刀架),Y轴的正向远离操作者,圆弧从起点到终点从反向看是顺时针,从正向看是逆时针时,用G02编程;圆弧从起点到终点从反向看是逆时针,从正向看是顺时针时,用G03编程。
②终点位置
G02/G03指令中的X(U)、Z(W)值是圆弧切削终点的值。用绝对值指令是圆弧切削终点在工件坐标系中的坐标值;用增量值指令是圆弧切削终点相对于圆弧切削起点的增量值。当圆弧切削的终点和起点有一个坐标值相同时,指令中可以省略这个坐标,当圆弧终点和起点的两个坐标值都相同,即整圆时,两个坐标都可以省略。
③圆弧的圆心
1)用I、K指令圆弧的圆心如图4-16所示。为同心相对于圆弧切削起点的X坐标增量值;K为圆心相对于圆弧切削起点的Z坐标增量值。I、K始终为增量位,与X、Z值是否是增量值无关。在直径、半径编程时,I都是半径值。
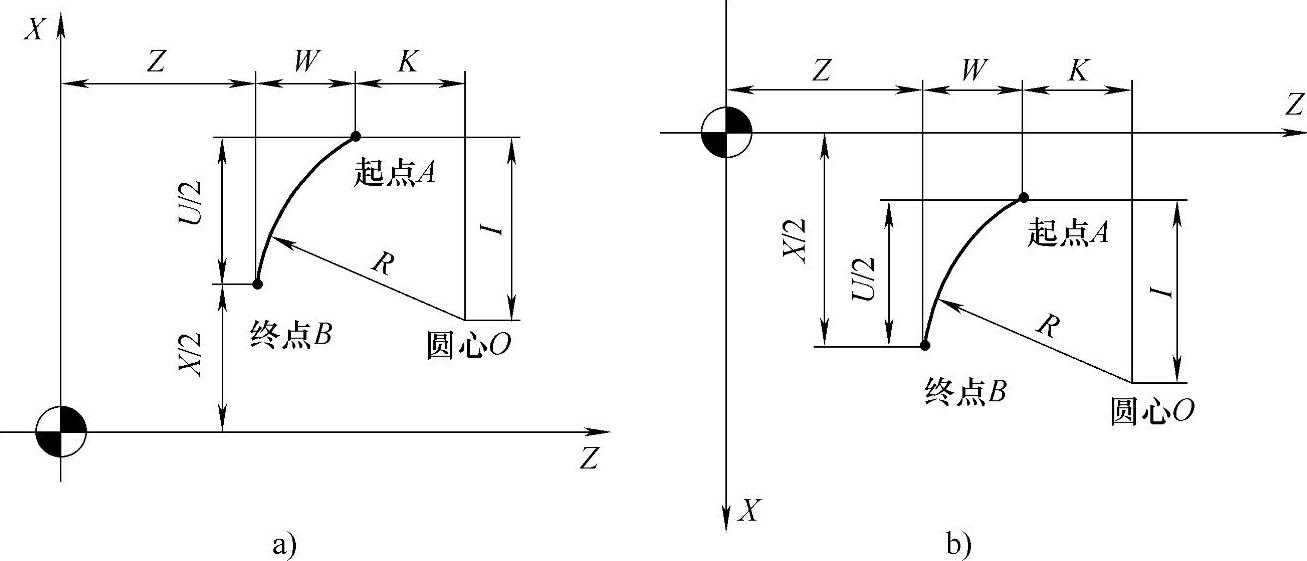
图4-16 G02/G03参数说明
a)后置刀 b)前置刀
【例4-6】G03编程。在图4-16a中,设O点坐标为(40,60),A点坐标为(120,40),B点坐标为(50,25),则编程时的I值为-40[(O点的X坐标-A点的X坐标)/2],编程时的K值为20(O点的Z坐标-A点的Z坐标)。圆弧的切削方向为逆时针,用G03编程。
用绝对坐标直径编程时的程序段为G36G90G03X50z25I-40 K20F100;
用增量坐标半径编程时的程序段为G37G91G03U-35W-15I-40K20F100。
2)用半径R指令圆弧的圆心。过起点A和终点B的圆弧有两个,即小于180°的圆弧和大于180°的圆弧,如图4-17所示。
为了区分是切削哪个圆弧,对小于180°的圆弧,半径R用正值表示;对大于180°的圆弧,半径R用负值表示;等于180°的圆弧,半径R用正值或负值均可。
在车床上,零件轮廓的圆弧通常小于180°,故编程时R为正值。
【例4-7】R指令圆弧的圆心编程。在图4-17中,设圆弧半径R50,A点坐标(60,80),B点坐标(20,40),圆弧的切削方向为逆时针,用G03编程。
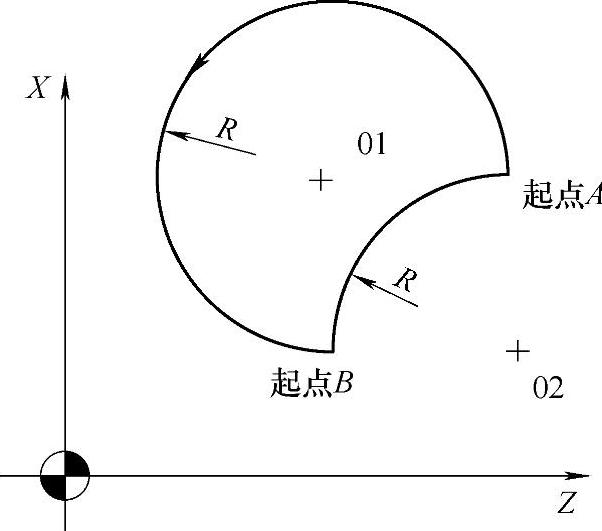
图4-17 半径R指令圆弧的圆心
用绝对坐标直径编程时的程序段为G36 G90 G03 X20 Z40 R50 F100;
用增量坐标半径编程时的程序段为G37 G91 G03 U-20 W-40 R50 F100。
3)整圆的圆心。切削整圆时,由于整圆的终点坐标与起点坐标重合,若用半径R指令圆心,则刀具不移动,即零度的圆弧。此时,必须用I、K指令整圆的圆心。
4)F为被编程的两个轴的合成进给速度。它是沿圆弧切线方向的速度,单位为mm/min。
【例4-8】圆弧切削指令编程。在图4-18中,设工件坐标系的原点在工件右端面中心点,刀具的对刀点在工件坐标系中的值为(40,5),该工件的精加工参考程序如下:
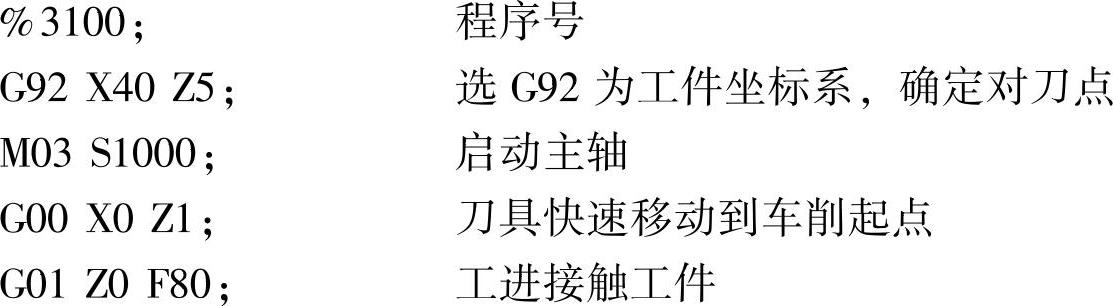
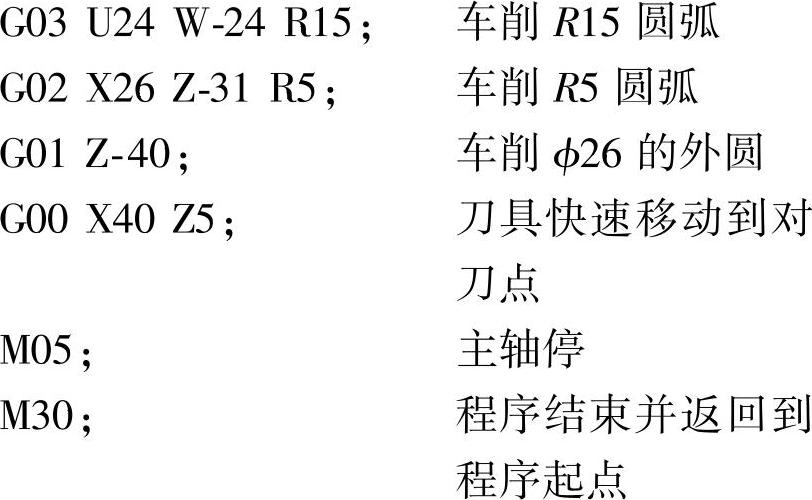
注:该程序还可以工件左端面中心点为工件坐标原点,对刀点不变来编写。
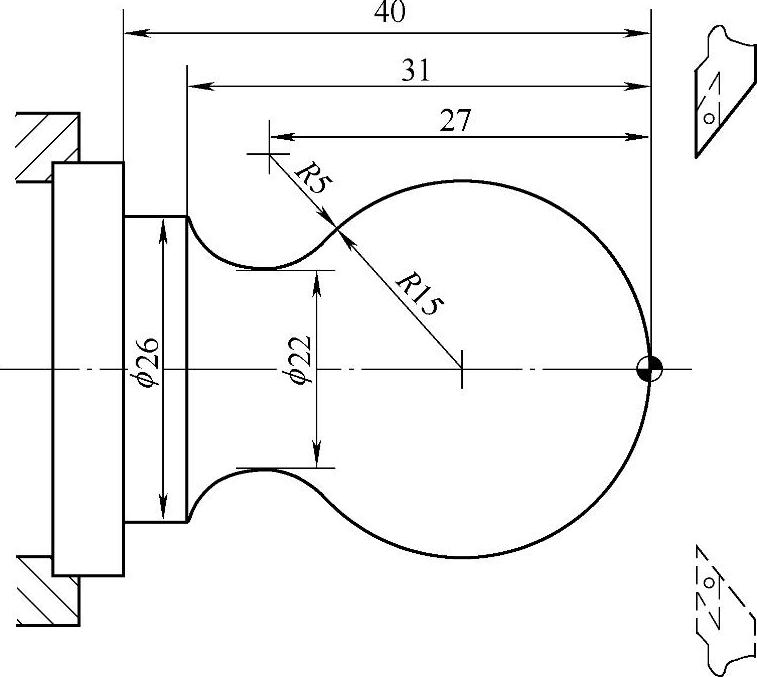
图4-18 圆弧加工综合编程
(9)倒角加工指令
①直线后倒(直线)角指令
指令格式;G01X(U)Z(W)C
该指令用于加工两条相邻直线间倒(直线)角,如图4-19所示。
指令中的X(U)、Z(W)位,在绝对值编程时为没倒角前两条相邻直线的交点E的坐标值,在增量值编程时为交点E到先期加工的真线的起点A的增量值。指令中的C位为倒角终点相对于两条相邻直线的交点E的距离。实际上,C就是倒角的边长。
【例4-9】直线后倒(直线)角指令编程。在图4-19中,设A点坐标为(20,80),E点坐标为(100,70),倒角边长C为5。
用绝对坐标直径编程时的程序段为G90G01 X100 Z70C5;
用增量坐标直径编程时的程序段为G91G01U80W-10 C5。
②直线后倒圆(角)指令
指令格式:G01X(U)Z(W)R
该指令用于加工两条相邻直线间倒圆(角),如图4-20所示。
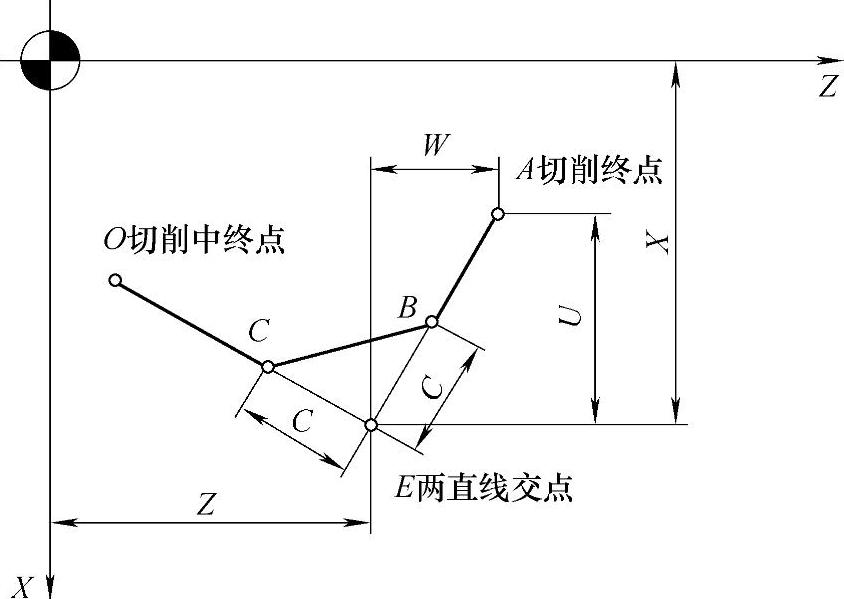
图4-19 直线后倒角
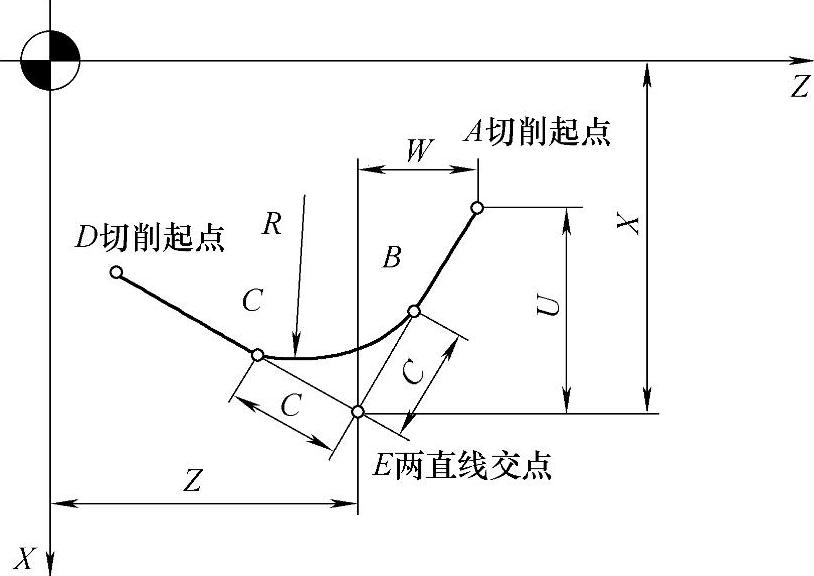
图4-20 直线后倒圆
指令中的X(U)、Z(W)值,在绝对值编程时为没倒圆(角)前两条相邻直线的交点E的坐标值。在增量值编程时为交点E到先期加工的直线的起点A的增量值。指令中的R值为倒圆角的半径值。
【例4-10】直线后倒圆(角)指令编程。在图4-20中,设A点坐标为(20,80),E点坐标为(100,70),侧圆(角)半径R5。
用绝对坐标直径编程时的程序段为G90 G01 X100Z70 R5;
用增量坐标直径编程时的程序段为G90G01U80W-10 R5。
③圆弧后倒(直线)角指令
指令格式:G02X(U) Z(W)R RL
G03X(U) Z(W)R RL
若圆弧与直线相交,交点在E点,加工时先加工圆弧,后加工直线,用该指令在圆弧和直线之间插入加工直线倒角,如图4-21所示。
指令中的X(U)、Z(W)值,在绝对值编程时为先加工的圆弧和后加工的直线的交点E的坐标值。在增量值编程时为交点E到先期加工的圆弧的起点A的增量值。指令中的R值为先加工圆弧的半径值。指令中的RL值为倒角终点C到圆弧与直线的交点E的距离,实际上是直线倒角的边长。
【例4-11】圆弧后倒圆(角)指令编程。在图4-22中,设A点坐标为(20,100),E点坐标为(100,50),圆弧半径R50,倒圆角半径RC值为5。
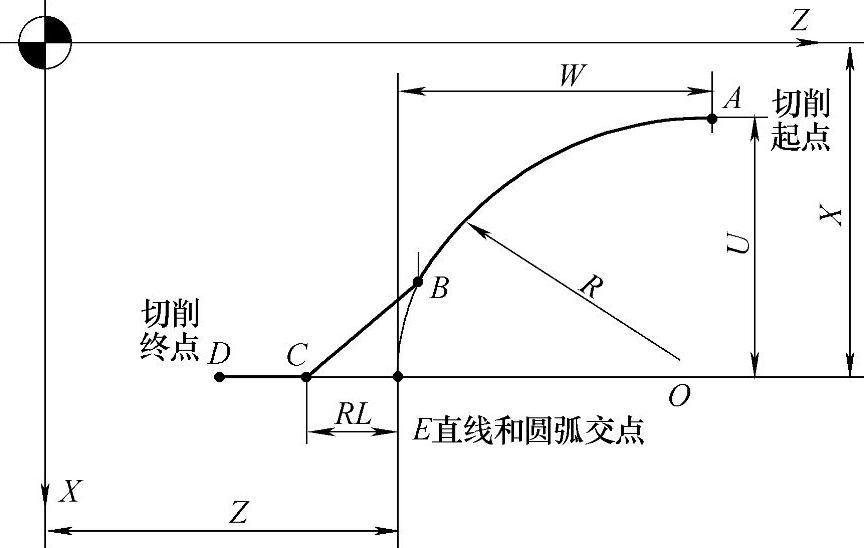
图4-21 圆弧后倒角
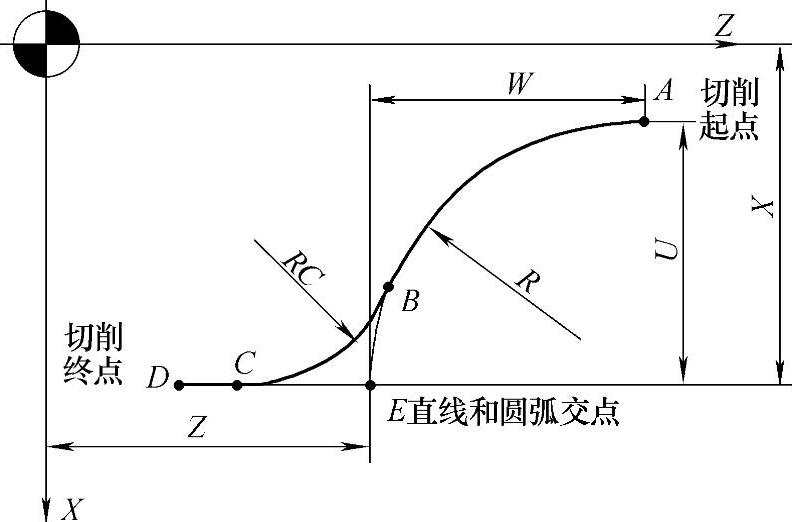
图4-22 圆弧后倒圆
用绝对坐标直径编程时的程序段为G90G02X100 Z50R50 RC5;
用增量坐标直径编程时的程序段为G91G02U80 W-50R50RC5。
【例4-12】倒角加工综合编程,如图4-23所示。其精加工参考程序如下:
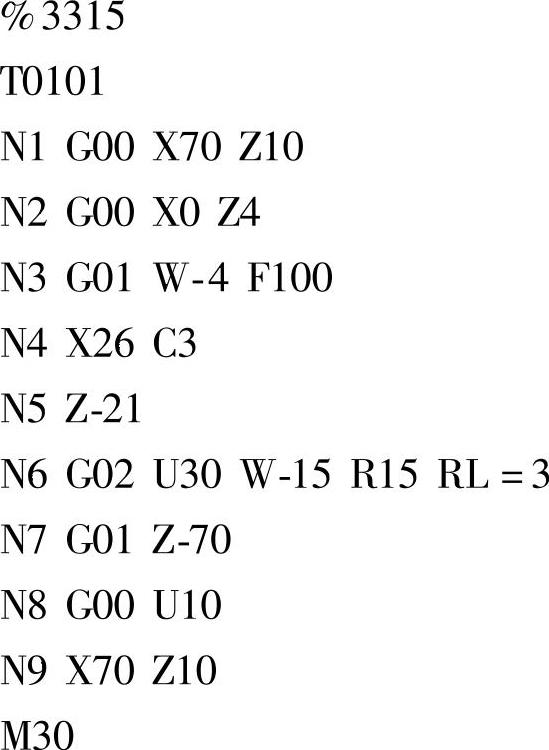

图4-23 倒角加工综合编程
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。