



对稳定基本控制过程进行分析,地面制动力与制动器制动力的关系如图4-27所示。考虑稳定控制过程中的第2~4阶段,第2阶段减压到A点,制动器制动力小于地面制动力,车轮呈现正的加速度,车轮开始回复,滑移率左移;制动压力保持至B点,使车轮充分回到稳定区;从B点开始车轮进入缓增压阶段4。缓增压阶段的设置影响稳控系统的制动效果。若缓增压速率过快,则很快到达减压点C,车轮的增减压循环过多,控制效果粗暴;若缓增压速率过慢,则停留在峰值附着系数对应的滑移率左侧的区域时间过长,导致地面制动力偏低,制动强度小。因此需要设置合适的缓增压阶段。考虑这样的理想情况:合理设置在增压点B的缓增压首个增压阶梯,使初始阶段增压速率尽量快,迅速补偿减压阶段造成的压力不足,令滑移率尽快接近峰值附着系数对应的滑移率,保证制动强度;然后缓增压速率变慢,使滑移率尽量维持在峰值附着系数对应的滑移率附近,保证制动效果。按照这样的思路对稳控系统缓增压的首个增压阶段进行补偿。由于这个补偿是仅针对首次增压阶段的,因此将此阶段单独考虑。仍然考虑稳定制动过程的基本原理,由于首次增压主要是为了补偿减压造成的压力水平低,对于图4-27中的ΔF,若ΔF越大,说明过度减压越多,首次增压补偿的步长也应越大。因此首次增压补偿主要由ΔF确定。而ΔF在稳控系统控制算法中虽然无法直接得到,但可以采用间接的方法。ΔF与车轮的回复过程有关,ΔF越大,车轮回复过程中所能达到的最大加速度越大,同时ΔF越大,轮胎回复过程越快,即AB点间的时间越短。用车轮处于回复阶段的时间长短和回复中所能到达的最大轮加速度作为首次增压阶段补偿的确定条件,补偿算法如图4-28所示。
TPW1通过一个二维规则表得到,规则表的输入为TGm和Gm。该二维表通过实车匹配得到,以表格的形式固化在ECU的存储器中,算法使用时通过查询二维线性表获得对应的首次增压步长。
为了保证稳控系统的控制效果和可靠性,需要考虑几种情况的补偿:①低速时的补偿:轮速在低速的时候无法计算准确,这样使得稳控系统在低速时候的控制效果变差。低速低附的补偿算法:当判断为低附着路面后,并且参考车速<10km/h,则当控制逻辑处于缓增压阶段时,减小增压,使增压速率变慢。②长时间没有减压的补偿:当稳控系统控制处于缓增压阶段过长时间,说明当前压力水平比较低。若继续采用普通的增压办法,可能会造成制动强度低,因此需要较快的增压速率。长时间没有减压出现的补偿算法:当缓增压持续超过设定的时间后,将压力特征值增大,补偿值随时间增加而增加,相当于逐步缩短缓增压中的保压阶梯,从而加快增压速率,保证强度。③出现连续长时间减压的补偿:若在高附着路面上出现了非正常的持续减压,为了保证制动强度,对持续减压进行限定。这种减压的限定必须在高附着路面工况上进行,在高附着路面上时,平均压力水平高,稳控系统控制的缓增压速率快,在由低附着过渡到高附着时,如图4-29所示,由于处于缓增压阶段时间超过限定值,缓增压速率逐渐变快,压力水平迅速提高以适应高附着路面的压力水平要求。自适应实时算法可以根据各种车况调整增减压速率,能符合路况的压力调节要求。
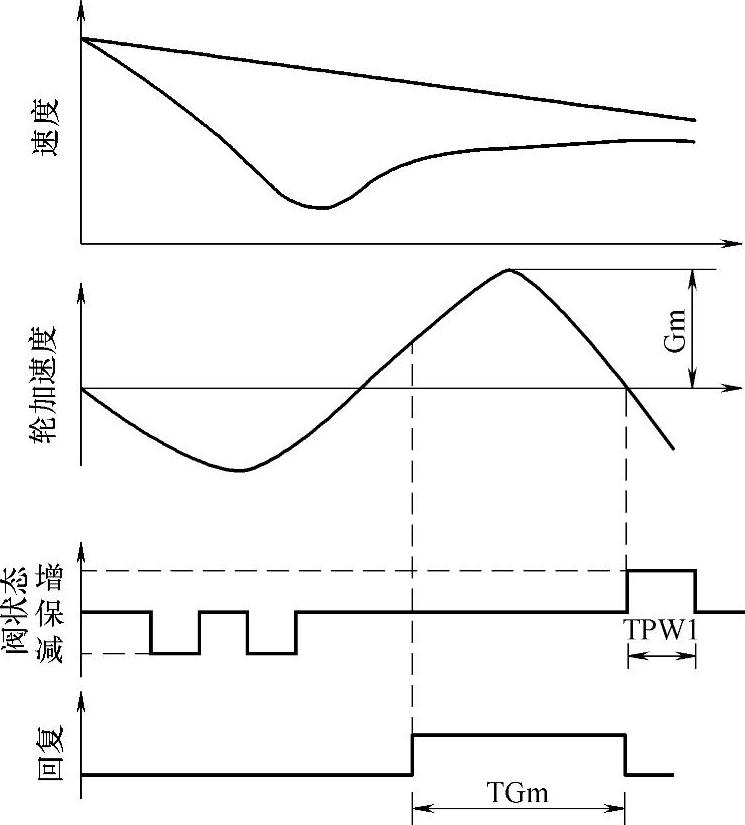
图4-28 首次增压阶段补偿算法示意图
TGm—记录车轮处于回复阶段的时间(https://www.xing528.com)
Gm—记录回复阶段所达到的最大轮加速度
TPW1—首次增压补偿的增压步长(增压时间)
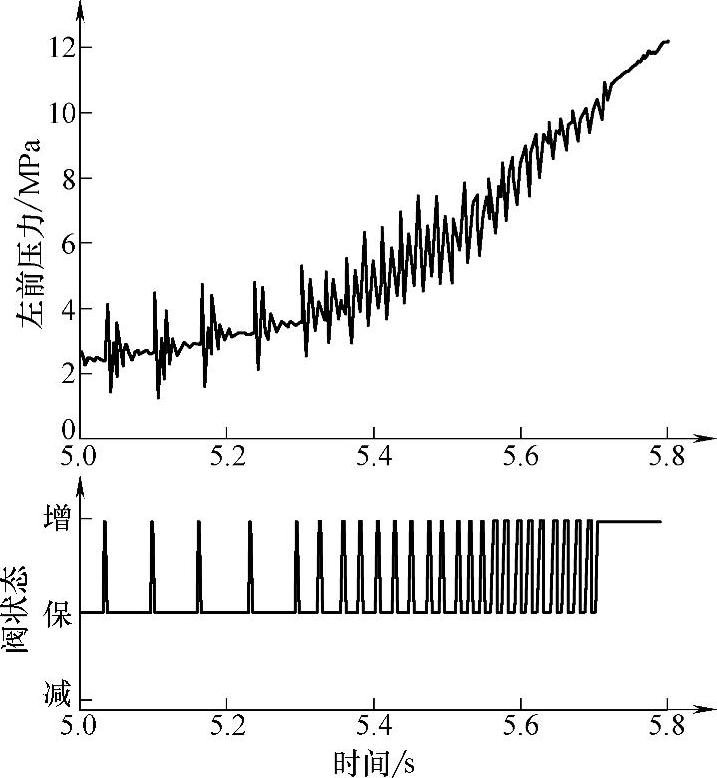
图4-29 稳控系统压力控制示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。