



随着对控制要求的提高,时滞控制和非线性控制正日益引起人们的关注。控制传感器测量、处理器计算、执行器驱动都需要一定的时间,导致控制力出现时间滞后现象。时滞不仅减弱系统性能,还会使控制系统的特性发生质的变化,由此引发系统运动稳定和分岔等一系列问题,尤其是在高模态控制的情况下。目前有三类时滞补偿的方法:理论型补偿、相空间补偿和时域补偿。前者将时滞系统描述为偏微分方程,在线计算量大,在时滞较小时,可以用Taylor级数截断简化计算或引入执行器的反馈迭代;次者通过反馈增益修正,对系统频率要求较严格;后者用运动补偿设计和动力补偿设计来预测响应,易受系统噪声干扰。三类方法各自的局限性都有待于完善。针对液压系统存在的时滞,利用时滞反馈对车辆摆动进行控制;采用时滞反馈控制非线性系统的混沌运动,也不失为一种积极的尝试。由于车辆系统稳定控制非线性,在行驶中表现出的非线性影响在被动控制中引入的非线性等,在实际系统中充满非线性问题,因此非线性控制方法的结果比线性控制方法更接近实际,也更加有效。近十几年才开始的对非线性系统控制的研究,主要是把优化控制法从线性系统推广到非线性系统。被动控制中非线性及整体的滞后都使控制复杂化。在控制反馈中使用速度和加速度反馈较传统的位移和速度反馈理想,因为加速度响应可从加速度传感器得到。另一种非线性控制方法是动态线性化,主要应用于摩擦型滑移隔离系统。使动态响应与某一特定的稳定线性系统模型吻合,以得到相应的控制力。把某一不确定系统分为互相耦合的子系统,主动反馈控制作用于其中之一。
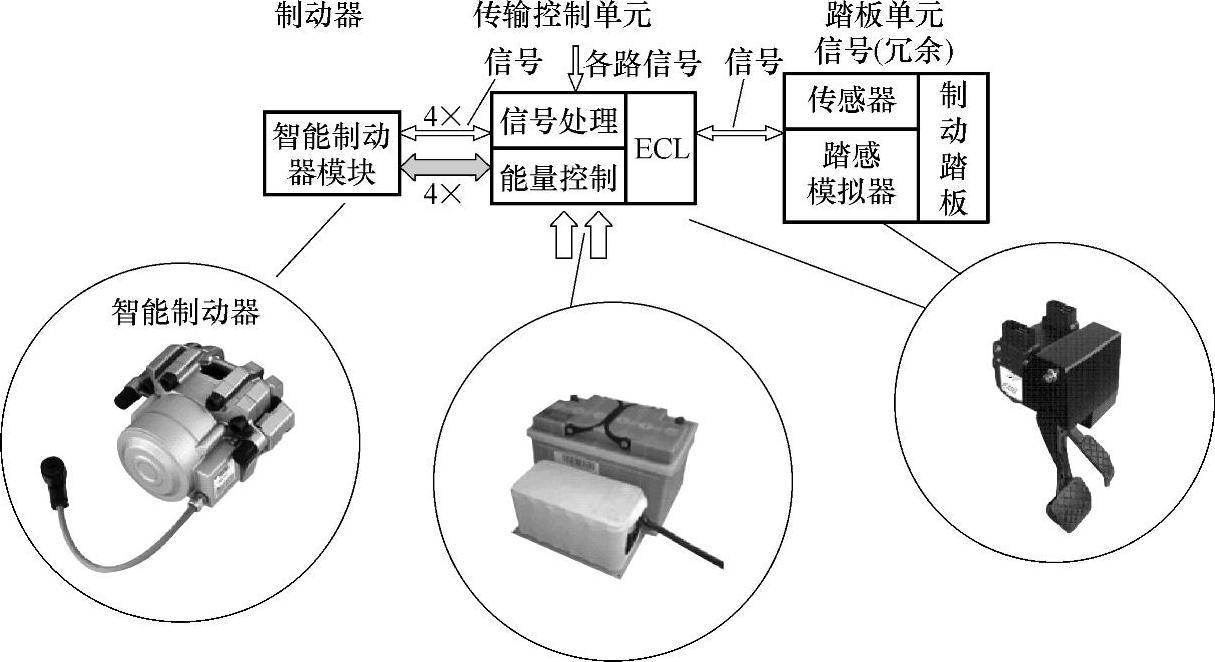
车辆系统为连续体,有多个自由度,即使简化为离散系统,自由度也很可观。与自由度相比,能够从中获得反馈信息的测点却有限。如何依据有限的信息反馈去获知系统的全态响应,关系到控制的效果和造价。Kalman滤波器在解决有限测点和预测控制的过滤技术中已得到广泛应用。优化输出反馈算法、模态缩聚技术都有助于解决这一关键问题。观测器-补偿器法利用有限的系统响应测量,通过观测器重建整个状态空间,补偿器则对输出修正反馈、形成控制力并保证系统的稳定。直接输出反馈法,是将测量的输出直接乘以与时间无关的反馈增益,得到控制力。该法经过优化,使在线计算变得简便易行。随着材料、控制、微电子和计算机技术的迅速发展,特别是新型传感器和执行器研究取得突破性进展,产生了智能系统这一崭新的现代系统概念。智能系统被定义为主动稳控系统。车辆智能制动稳定系统结构如图1-9所示,它将传感、执行、控制逻辑电路、电子集成芯片、信号处理器、信息处理和人工智能环节以及数据传递总线、电源等与主系统高度融合在一起,具有感知、智能逻辑判断与响应内外环境变化的能力,实现系统自检测、自诊断、自校正、自适应、自修复和学习等功能。智能稳定系统从提出就受到工业界的高度重视,目前,该系统主要集中在传感器、控制器、执行器建模及控制等方面。
 (https://www.xing528.com)
(https://www.xing528.com)
图1-9 车辆智能制动稳定系统结构
智能稳定系统的重要内容是实现系统的主动控制,它主要通过局部控制和全局控制方法来实现抑制。局部控制是利用自身配置的执行器-传感器,直接实现反馈控制,消耗残余能量,缩短系统自由响应的衰减时间。全局控制目的在于抑制响应,保证系统的全局稳定和提高鲁棒性。发展自适应控制、模糊控制、神经网络控制等控制技术,优化系统稳定性,已崭露出广阔的应用前景。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。